改进AOA模式的大田农机无人驾驶导航参数检测系统设计
2021-10-12解彬彬刘继展蔡连江徐朱洁崔冰波
解彬彬,刘继展※,何 蒙,蔡连江,徐朱洁,崔冰波
(1.江苏大学农业工程学院,镇江 212013;2.现代农业装备与技术教育部重点实验室,镇江 212013)
0 引 言
随着农业劳动力的老龄化、短缺与成本增加以及信息技术的快速发展,无人大田农业将成为未来农业发展的一个重要方向,“以机换人”的需求是必然发展趋势。实现无人大田农业的前提是农业机械自主导航。随着现代农业生产向自动化、规模化、精准化和低成本方向发展以及目前常用的卫星定位-预建农田地图的农机导航系统在面对生产特征呈现区域化、分布零散和适度规模种植的小型农田有难以满足便捷跨区域作业的困难[1-4]。因此,研究一种低成本、高精度和使用便捷的导航参数检测系统是必要的。
近年来,UWB(超宽带,Ultra Wide Band)技术在无线通信传输领域得到了广泛关注,是目前高精度定位最有前景的技术之一[5-6],为农业和工业的自主导航技术研究提供了便利和新的思路。国内外学者对UWB导航技术进行了诸多研究:孙小文等[7]考虑了时钟偏移等因素开发了适用于农资仓储环境下的脉冲超宽带室内定位系统;林相泽等[8]利用K-means聚类与截段处理方法优化距离测量误差,获得准确的农用车辆定位信息,实现温室内农用车辆的精确作业;姚立健等[9]基于超宽带无线定位,设计了改进型动态前视距离的纯追踪模型,实现农业设施需求的车辆自动导航;符世琛等[10-13]在狭长巷道内利用超宽带定位技术实现了掘进机的三维空间内厘米级定位和自主导控。以上研究的技术实现方式是在作业区域边界布置3个及以上UWB基站并建立精准的三维坐标点,通过伪卫星法采集农机本体上UWB标签与UWB基站的实时距离,确定作业机具在作业区域内的实时位置坐标,计算作业机具关于目标作业路径的横向偏差和航向偏差,对规模化和已经标准化建设的设施农业环境具有良好的适用性。室外开放且需要经常更换作业地块的大田环境不适宜建立永久固定基站且使用过程繁琐,所以该技术方式不适用大田环境下农业机械自主导航需求。
目前国内大田农业以个体经营体制和家庭联产承包责任制为主,分布零散,尤其以南方水田为主,以百米级别的小田块集中种植模式为主。从测量范围上,目前UWB定位技术有短距离和长距离2种类型,其中长距离测量模块可达300 m以上,最大可至1 200 m,测距定位精度最优在 5 cm以内[14],因此长距离的 UWB无线测距传感器在使用范围和检测精度上能够满足大田农机自主导航驾驶需求的。
针对上述问题,本文以大田环境下无人驾驶农机往复作业模式为研究背景,基于UWB基站-标签相对测距信息,设计了改进AOA(信号到达角度,Angle-of-Arrival)模式的农业机械导航参数检测方法,并进行系统设计与试验,分析了关键因素对检测精度的影响规律,以期通过近距-成对布置UWB基站组方式实现大田环境下成本低、检测精度高和系统构成简单的自主导航。
1 改进AOA模式自主导航系统总体结构
1.1 改进AOA组合布置方式
传统AOA定位需要配置复杂的天线系统且角度误差对定位精度的影响远比测距误差大,该技术方式通过获取待测标签至 2个基站的信号到达角度进行定位,仅能实现农机相对移动标签的自动跟随作业,不具备又快又好的直线自主导航能力,使得传统AOA定位方式无法满足农业机械自主导航作业需求[15]。依据本文提出一种改进AOA模式的大田农机自主导航方案,利用农田边界外围布置双 UWB基站作为导航参数(横向偏差或航向偏差)检测参照,农机车身布置双UWB标签,利用UWB基站-标签实时测距信息,实现农机本体的导航参数实时检测。
农田边界双 UWB基站有垂直作业路径的田头布置方式和平行作业路径的田边布置方式。影响AOA定位精度的主要因素是信号达到角度(UWB标签信号与双UWB基站天线中心连线的夹角)的计算精度,由于UWB基站-标签本身具有一定的测距误差,根据三角形特征和三角函数关系,田头布置方式求解横向偏差需要计算UWB标签与双UWB基站的方位角(信号到达角度),导致误差二次累计放大,会造成自主导航参数的检测误差变大,而田边布置方式通过3边距离求解横向偏差和航向偏差,不需要进行方位角测量,理论上可以获得较高的精度,因此本文研究采用平行作业路径的田边双 UWB基站布置方式,如图1a所示。
通过安装在农机车身的双 UWB标签与农机车身中心点构成的几何关系可求解农机中心点与双 UWB基站中心轴线的垂直距离和目标作业路径距离之差,即横向偏差,农机车身纵向中心轴线或横向中线轴线与目标作业路径的夹角即为航向偏差。为简化自主导航参数的计算过程和降低计算过程难度,本文将农机车身双UWB标签安装方式分为2种,如图1b所示。
田边双UWB基站与农机车身双UWB标签有2种布置方式,如图2所示,分别是双基站-纵向双标签布置方式(下文简称TBZ布置方式)和双基站-横向双标签布置方式(下文简称TBH布置方式)。
1.2 无人驾驶导航参数检测系统组成及工作原理
农业机械无人驾驶导航参数检测系统主要由 2组UWB基站-标签套件(DWM1000 UWB模块,其测量距离≤300 m,测距精度±5 cm)、STM32控制器、人机交互显示屏(4.3寸LCD电容触摸屏)和RS485通信接口等组成,如图3所示。
系统工作时,首先STM32控制器检测UWB标签1和UWB标签2与双UWB基站间的实测距离(UWB基站-标签间距离信息是通过双向双边测距算法自行解算,STM32控制器仅负责接收并解析UWB标签输出的测距信息),然后STM32控制器依据解算模型计算横向偏差和航向偏差,偏向状态判定表格计算横向偏差和航向偏差的偏航方位,通过RS485通信接口输出固定的数据帧格式[16],供给PC机或下位机控制器,最后由PC机或下位机控制器构成的导航系统根据检测到的横向偏差和航向偏差结合农机转向路径校正控制器实现农机自主导航作业。导航参数检测系统工作流程如图4所示,数据帧格式如表1所示。为便于调试和简化开发过程,横向偏差和航向偏差的数据格式统一采用16进制压缩BCD码,利用8字节数据帧格式进行输出,具体设计如sxxxyy,sx为符号位(sx为00表示横向偏差和航向偏差相对农机目标作业路径偏右为正,sx为10表示横向偏差和航向偏差相对农机目标作业路径偏左为负),xx表示整数位,yy表示小数位,数据内容为横向偏差和航向偏差。其中,第0字节是0×01表示位姿参数报文的帧标识符,第1、2和3字节表示横向偏差,第4、5和6字节表示航向偏差,第7字节是校验和,用于验证数据的完整性和准确性。

表1 导航参数数据帧结构表Table 1 Navigation parameter data frame structure table
1.3 田边双UWB基站空间偏移情况分析与检测
对于TBZ和TBH布置方式,需要在同一高度水平面安装UWB基站和UWB标签,在使用过程中,面对室外开放且需要更换作业田块的大田环境下,UWB基站需要更换布置位置,在布置过程中往往会存在空间上的随机偏移,在对导航参数求解时,必须对基站偏移进行校正。图5为2种组合布置方式的基站空间偏移示意图,以农田左下角O点为坐标原点,农田长度方向为x轴,农田宽度方向为y轴,垂直地面向上为z轴。改进AOA模式的自主导航参数检测系统是假设双 UWB基站中心线与农机目标作业路径(y轴)平行,双UWB基站与双UWB标签处于同一水平面(与地面平行)。然而,双UWB基站人工布置过程中存在随机偏差,具体偏移情况说明如下:
1)双UWB基站中心线不平行农机目标作业路径,在xoy平面上的投影与农机目标作业路径产生夹角,即水平偏角ψ;
2)双UWB基站中心线应与地面平行,双UWB基站布置高度不一致,与xoy平面产生夹角,即垂直偏角φ;
3)双UWB基站与双UWB标签在z轴方向不处于同一水平面(双UWB标签通过一次性校正处理固定安装农机车身上保证同一高度,误差是双UWB基站布置过程的随机误差造成),在z轴方向产生高度差,即纵垂偏距Vh。
通过偏移情况分析得知,实际布置的双UWB基站中心线与假设的双UWB基站中心线发生空间内的偏移,实际参照路径位置发生偏移,造成自主导航参数计算误差,主要原因是UWB基站与UWB标签相对位置关系发生偏移,导致UWB基站-标签的距离发生偏移。为了校正基站布置偏移产生的误差,通过后校正处理方法修正UWB基站-标签的距离值,将双UWB基站空间内的偏移量消除,修正自主导航参数计算误差。
通过机载电子罗盘(慧联D435三维电子罗盘,测量精度≤0.1°)预设置作业路径初始航向,通过另一电子罗盘(慧联D435三维电子罗盘,测量精度≤0.1°)检测双 UWB基站中心线方位角与机载电子罗盘预设置作业路径初始航向角并做差得出水平偏角ψ;固定UWB基站的三脚架上装有测距传感器,测量UWB基站距地面垂直距离,通过计算UWB基站1和UWB基站2的高度差与基站间距的比值得出垂直偏角φ;农机车身与双UWB标签同一高度水平安装激光扫描测距仪,测得UWB基站所在水平面高度与双 UWB标签安装高度做差即是纵垂偏距Vh。
1.4 农机车身姿态角分析与检测
农机在大田作业时,由于地表不平会导致农机运动过程中出现俯仰角和横滚角,影响检测精度[17]。为尽可能避免多径干扰对UWB信号的影响,UWB标签离地高度至少 2 m左右[18],所以即使较小的姿态角也会对导航参数产生较大影响。因此,必须对农机姿态角对导航参数进行误差校正。俯仰角和横滚角仅影响横向偏差的检测精度,本文采用后校正处理方法修正补偿误差。俯仰角是农机纵向中心轴线与水平地表面的夹角,俯角为正,仰角为负;横滚角是农机横向中心轴线与水平地表面的夹角,沿作业方向左倾为负,右倾为正。农机车身的俯仰角和横滚角由安装在车体上的电子罗盘检测得出。
2 无人驾驶导航参数解算模型
改进AOA模式农业机械无人驾驶导航参数的实时检测首先根据农机作业幅宽、农机实际作业所在行数和双UWB基站天线中心线距田边垂直距离计算理论目标作业路径距离(农机所在作业行与双UWB基站天线中心线的垂直距离)、然后计算农机车身安装的双UWB标签天线中心与双 UWB基站天线中心线的垂直距离作为实时计算农机横向偏差和航向偏差依据。
2.1 理论目标作业路径距离计算
理论目标作业路径距离是本文求解农机车身横向偏差的一个关键变量,随着农机自主导航作业的转弯换行完成,理论目标作业路径距离增大,即农机所在作业行与基站的理论垂直距离增大。随着作业行数增大,理论目标作业路径距离也增大。由于往复作业模式分为农机沿长边行走和沿短边行走,因此,农机的转弯换行次数不同,并且转弯换行的最大次数与农田的长、宽和农机作业幅宽有关,因此,为实现农机无人驾驶全过程自主导航,还需要确定最大转弯次数和理论目标作业路径的关系。图6是最大转弯次数和理论目标作业路径距离计算方法示意图。由于目前国内农业种植较多采用等幅宽,因此理论目标作业路径距离的计算仅由农机的具体作业行数和农机作业幅宽确定,如式(1)所示。图7为目标作业路径距离和最大换行转弯次数计算流程,理论目标作业路径距离计算公式如式(2)所示。
式中Kmax1为沿短边作业的转弯次数;Kmax2为沿长边作业的转弯次数;[]表示取整。
式中K为实际作业所在行数,第一行作业时K为0。
2.2 TBZ组合布置方式
2.2.1 导航参数计算
图8为TBZ布置方式正向和反向作业工况下导航参数解算模型,首先假设双UWB基站布置不存在偏移,根据UWB基站-标签的几何关系,求解农机任意姿态情况下农机车身关于理论目标作业路径的横向偏差X和航向偏差θ,如式(3)所示。
式中X为农机车身横向偏差,m;Hb为UWB标签1距地面高度,m;α为农机车身俯仰角,(°);β为农机车身横滚角,(°)。
式(3)是假设双UWB基站布置不存在偏移,但双UWB基站在田间通过人工布置,空间上存在随机的偏移误差,因此,双UWB基站布置不存在空间偏移的情况是不存在的。双UWB基站布置的空间偏移会导致农机车身关于理论目标作业路径的横向偏差X和航向偏差θ的检测精度降低,影响农机自主导航作业性能,必须对双UWB基站的空间偏移进行误差校正。
根据图5可知,双UWB基站布置偏移主要包括水平偏角ψ、垂直偏角φ和纵垂偏距Vh,其中,水平偏角ψ根据基站偏移方位需要分为正负区间考虑,在UWB基站1发生水平偏移,水平偏角ψ∈(-π/2,0]在负区间时d12和d22出现测量误差;在 UWB基站 2发生水平偏移,水平偏角ψ∈[0,π/2)在正区间时d11和d21出现测量误差;双UWB基站中心轴线水平面与双 UWB标签中心轴线水平面的高度差纵垂偏距Vh同时影响d11、d12、d21和d22;垂直偏角φ使UWB基站1相对于UWB基站2纵垂方向出现高度差,导致UWB基站中心轴线的延长线与y轴之间产生夹角,使d11和d21出现测量误差,综上得到,如式(4)和式 (5),双 UWB 基站空间偏移的误差校正方程。ψ∈(-π/2,0]或ψ∈[0,π/2)情况下,分别通过式(4)或式(5)求出的d12′和d22′替换式(3)中的d12和d22,d11′′和d21′′替换式 (3)中的d11和d21,求解横向偏差X和航向偏差θ。
式中d12′为UWB标签1与UWB基站2距离d12的偏移校正值,m;d22′为UWB标签2与UWB基站1距离d22的偏移校正值,m;d11′′为UWB标签1与UWB基站1距离d11的偏移校正值,m;d21′′为UWB标签2与UWB基站1距离d21的偏移校正值,m。
2.2.2 农机车身偏航状态判定
根据农机车身中心点关于农机目标作业路径的位置关系,即农机车身中心点距双UWB基站中心线的垂直距离H与理论目标作业路径距离x的差值正负确定横向偏差X的偏向方向。表2是TBZ布置方式的横向偏差判定表格,当h1=h2=x时,农机车身不存在横向偏差。根据UWB标签1和UWB标签2距双UWB基站中心线的位置关系,即根据UWB标签1距双UWB基站中心线的垂直距离h1与UWB标签2距双UWB基站中心线的垂直距离h2的差值正负判断农机车头相对农机目标作业路径的航向偏差θ的偏向方向,表3是TBZ布置方式的航向偏差判定表格。

表3 TBZ布置方式的航向偏差状态判定Table 3 Determination of heading deviation state of TBZ layout
2.3 TBH组合布置方式
2.3.1 导航参数计算
图9为TBH布置方式正向和反向作业工况下导航参数解算模型。与TBZ布置方式类似,根据三角形关系考虑基站布置空间偏移和农机存在姿态角情况下,求解农机本体关于目标作业路径的横向偏差X和航向偏差θ,如式(6)所示,ψ∈ (-π/2,0]时,由式(4)中求出的d12′和d22′替换式(6)中的d12和d22,d11′′和d21′′替换式(6)中的d11和d21计算求解横向偏差X和航向偏差θ;ψ∈[0,π/2)时,由式(5)中求出的d12′和d22′替换式(6)中的d12和d22,d11′′和d21′′替换式(6)中的d11和d21计算求解横向偏差X和航向偏差θ。
2.3.2 农机车身偏航状态判定
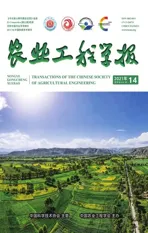
根据农机车身中心点关于农机目标作业路径的位置关系,即农机车身中心点距双UWB基站中心线的垂直距离H与理论目标作业路径距离x的差值正负确定横向偏差X的偏向方向.表4是TBH布置方式的横向偏差判定表格。根据UWB标签1和UWB标签2距UWB基站1的实际距离位置关系以及UWB标签1和UWB标签2距UWB基站2的纵向相对位置关系判断农机车头相对农机目标作业路径的航向偏差θ的偏向方向,表5是TBH布置方式的航向偏差判定表格。

表4 TBH布置方式的横向偏差状态判定Table 4 Determination of lateral deviation state of TBH layout
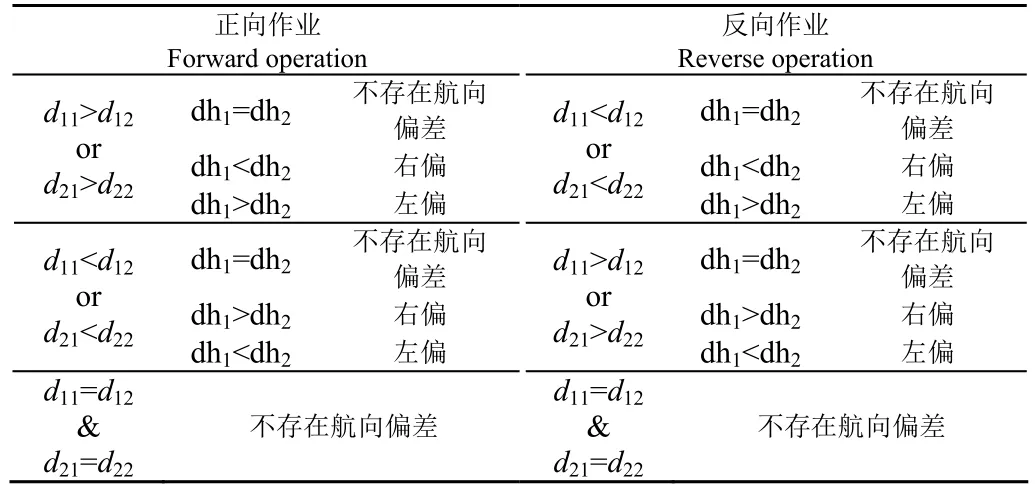
表5 TBH布置方式的航向偏差状态判定Table 5 Determination of heading deviation state of TBH layout
2.4 影响检测精度的关键参数分析
双UWB标签中心距双UWB基站中心轴线的垂直距离(h1和h2)是通过三角形面积的海伦凯勒公式求得,通过分析,影响h1和h2计算精度与双UWB基站间距(dj)和UWB基站-标签的实测距离有关,其中UWB基站-标签测距是不可控的随机误差,可以通过改变双UWB基站间距(dj)提高测量精度。横向偏差由双UWB标签距双UWB基站中心轴线的垂直距离(h1和h2)、双UWB标签间距(db)与目标作业路径距离(x)的差值关系求得,所以横向偏差检测精度与双 UWB基站间距(dj)和双UWB标签间距(db)有关。航向偏差由双UWB标签距双 UWB基站中心轴线的垂直距离(h1和h2)差值与双UWB标签间距(db)的比值反三角函数求得,因此可知:航向偏差的检测精度与双UWB基站间距(dj)和双UWB标签间距(db)有关。
通过上述分析可知,除基站布置偏移和农机姿态角对检测精度影响外,所以 2种布置方式的基站布置间距和标签布置间距对检测精度影响较大。下文针对双UWB基站间距和双UWB标签间距对检测精度的影响进行试验分析。
3 室外试验与结果分析
3.1 静态试验
3.1.1 试验材料与设备
试验选用 DWM1000 UWB模块,其测量距离≤300 m,测距精度±5 cm,采用STM32F103ZET6正点原子开发板,具备LCD电容触摸交互显示屏,RS485输入/输出端口、工业级USB转RS485数据传输模块,试验在江苏大学京江操场进行,如图10所示。
3.1.2 试验设计与方法
以GB/T 37164—2018《自走式农业机械导航系统作业性能要求及评价方法》为依据[19],对TBZ和TBH布置方式进行直线导航精度检测试验,以偏航距离误差、导航误差和变异系数为评价指标,验证本文研制的农业机械无人驾驶导航参数检测系统的可行性以及关键参数对检测精度性能的影响。
试验时,以双UWB基站间距和双UWB标签间距为自变量,对 2种不同布置方式的横向偏差和航向偏差进行统计。根据对国内使用较多的拖拉机、收割机和插秧机尺寸[20-21],农业机械长度l=1~5 m;作业幅宽w=1~3 m;所以双UWB标签db取值范围根据农业机械的实际有效长度和宽度决定,纵向双UWB标签db=1~5 m;横向双UWB标签db=1~3 m;考虑导航系统搭建时便捷,双UWB基站间距设置dj∈[1,3],单位:m。因此,设定双 UWB基站间距和双UWB标签间距为1、2和3 m共3个水平,机具作业幅宽以东方红拖拉机加旋耕平地机为参照,设定为3 m。指标计算方法如式(7)所示。
式中E为检测精度(误差),取正值,m;di为第i个采样点的检测精度(误差),m;N为采样个数。
TBZ组合布置方式检测精度试验:选取一条长100 m的直线,以1 m为间距进行横向偏差和航向偏差的检测精度测量,为了保证数据测量的有效性,单次测量 350个数据,重复3次,并计算检测精度变异系数[22]。
TBH组合布置方式检测精度试验:与TBZ组合布置方式检测精度试验方法一致,重复 3次试验,单次测量350个数据,记录横向偏差和航向偏差的检测精度,并计算检测精度变异系数。
正交试验:通过上述分析可知,影响本文改进AOA模式农业机械无人驾驶导航参数检测系统精度的因素有布置方式、基站间距和标签间距,为了进一步研究布置方式对检测精度的影响,采取拟水平法进行正交试验设计[23],试验因素和水平如表6所示,并进行方差分析、显著性和主次影响因素分析以及最优组合参数确定。
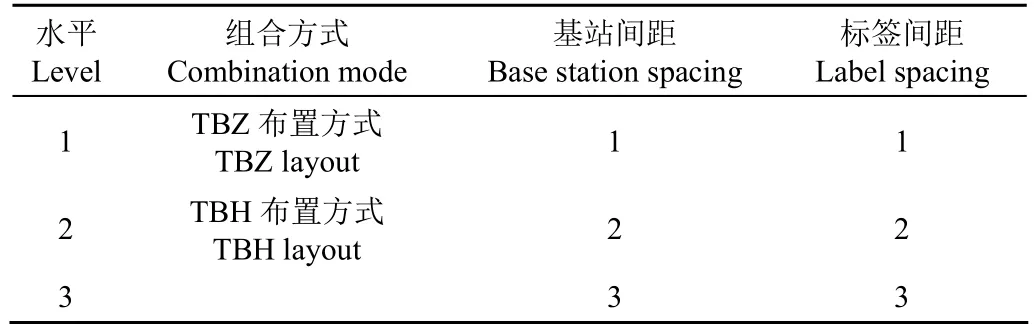
表6 试验因素及水平表Table 6 Test factors and level table
3.1.3 试验结果与分析
由表7可知,为TBZ布置方式在基站间距固定情况下,随着标签间距增大,横向偏差和航向偏差检测精度均有提高,在标签间距固定情况下,随着基站间距增大横向偏差和航向偏差检测精度均有提高,横向偏差检测误差不大于8 cm,最大变异系数为10%,最小变异系数为 7.29%,航向偏差检测误差小于 1°,变异系数在 3%以下,最大变异系数为2.55%,最小变异系数为0.40%,检测精度稳定且基本满足导航需求。因此,在满足机具尺寸要求和系统使用便捷性的前提下,应选取较大基站间距和标签间距。
在基站间距和签间距固定情况下,TBH布置方式,随着标签间距或基站间距增大,横向偏差和航向偏差检测精度均有提高基本呈线性变化;横向偏差检测误差小于8 cm,最大变异系数为10%,最小变异系数为3.45%,航向偏差检测误差小于 1°,变异系数在 1%以下,最大变异系数为1.00%,最小变异系数为0.34%,检测精度稳定且基本满足导航需求。因此,在满足机具尺寸要求和系统使用便捷性的前提下,应选取较大基站间距和标签间距。
根据表7的试验结果进行比对分析发现,在同样限制条件下,TBZ组合布置方式的检测精度优于TBH组合布置方式的检测精度。表8为正交试验结果与方差统计结果,方差分析表明:基站间距显著影响横向偏差检测精度,标签布置方式和标签间距显著影响航向偏差检测精度;标签布置方式和标签间距对横向偏差检测精度影响不显著,基站间距和标签间距对航向偏差检测精度影响显著。
表7 TBZ和TBH布置方式试验结果Table 7 Test results of TBZ and TBH layout mode
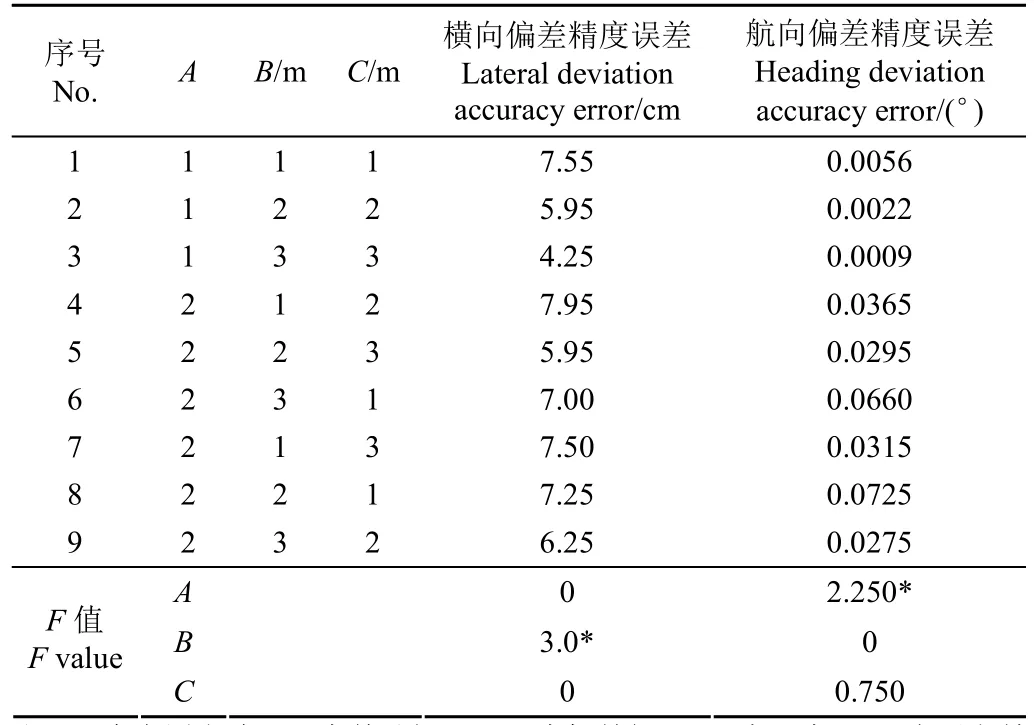
表8 试验结果与方差统计Table 8 Experiment results and variance statistics
表9为最佳组合布置方式分析表,影响横向偏差检测精度的主次因素分别是基站间距、标签间距、标签布置方式。横向偏差最优方案是A1B3C3,说明适当增加基站间距有助于提高横向偏差检测精度。航向偏差的最优方案是A1B1C3,说明影响航向偏差检测精度的主次因素分别是标签布置方式、标签间距、基站间距。农机在大田进行自主导航作业时横向偏差检测精度比航向偏差检测精度要求高,因此本文最佳组合选取A1B3C3。农机车身标签布置因根据农田场景和农机车身尺寸的实际情况进行,当不方便采用纵向双UWB标签布置,则需要采用横向双UWB标签布置,此时最佳组合选取A2B3C3。

表9 最佳组合布置方式影响因素分析表Table 9 Analysis table of influencing factors of optimal combination layout mode
根据正交试验分析可知,不同基站-标签间距组合对横向偏差和航向偏差检测精度误差有交互作用,如表10所示。图11为不同基站-标签间距组合对横向偏差和航向偏差检测精度误差交互作用的拟合结果。式(8)和式(9)为不同基站-标签间距组合对横向偏差和航向偏差检测精度交互作用影响方程。

表10 不同基站-标签间距组合对横向偏差和航向偏差检测精度交互作用表Table 10 Interaction of different base station-label spacing combinations on lateral and heading deviation detection accuracy
3.2 动态试验
3.2.1 试验材料与设备
如图12所示,动态试验测试,将UWB标签搭载在自制电动底盘上,在静态试验的路径上以固定匀速行驶进行连续采样试验,以国内大田农业机械机组田间作业低速(3和4 km/h)、中速(5和6 km/h)和高速(7和8 km/h)共6个水平开展模拟试验,为了保证数据测量的有效性,每个速度水平下重复3次试验,按照式(7)计算位姿检测精度及变异系数。
3.2.2 试验设计与方法
按照上述车速设定的工况下,以 2种不同标签布置方式的最佳组合开展试验验证系统在动态环境下的检测效果。
3.2.3 试验结果分析
表11为动态试验测试结果,对于TBZ和TBH组合布置方式的横向偏差精度均不超过10 cm,变异系数小于3%,航向偏差的检测精度均小于 3°,变异系数不大于10%,系统具有较高的稳定性。
从表11可知,随着车速增大,横向偏差和航向偏差的检测精度有所降低,但变异系数均小于 10%,说明系统工作性能是稳定的。在低速和中速情况下,2种组合布置方式的横向偏差和航向偏差检测精度,随着车速增加精度略有降低,但是波动不大,主要原因是低速工况下UWB信号传输分辨率不受影响。对比于低速和中速情况,在高速情况下,2种组合布置方式下,随着车速增加横向偏差检测精度下降了2~3 cm左右,航向偏差检测精度下降了3°。由此可以看出,高速行驶对检测精度影响极大,但仍然具有较高的检测精度。

表11 动态试验测试结果Table 11 Dynamic test results
4 结 论
针对目前生态无人农场发展趋势以及现有大田环境下农业机械自主导航技术不足,本文选用UWB测距传感器设计改进AOA模式农业机械无人驾驶导航参数检测系统,以期在大田环境下实现农业机械的成本低、精度高和使用便捷自主导航调控,主要结论如下:
1)设计了平行目标作业路径布置的双UWB基站,农机本体上安装双UWB标签,明确了2种布置方式,考虑基站布置偏移和农机姿态偏角对检测精度影响,建立导航参数解算模型和农机车身偏向状态判定分析表,实现实时进行农机车身关于目标作业路径的横向偏差和航向偏差解析。
2)室外静态试验表明:对于田边双基站-车身纵向双标签组合布置方式(TBZ布置方式)和田边双基站-车身横向双标签组合布置方式(TBH布置方式),随着基站间距或标签间距增大的情况下,系统检测精度均有所提高,横向偏差检测精度误差小于 8 cm,航向偏差检测精度误差小于1°,最大变异系数均不超过10%,检测性能稳定;2种布置方式对比分析发现,TBZ布置方式的检测性能优于TBH布置方式,基站间距对横向偏差检测精度影响显著,可以通过适当增大基站间距获取高精度横向偏差检测性能,影响横向偏差和航向偏差检测精度的主次因素为基站间距、布置方式、标签间距,标签间距对横向偏差和航向偏差检测精度影响不显著。在TBZ布置方式下,基站间距为3 m和标签间距为3 m条件下,横向偏差和航向偏差检测精度为4.25 cm和0.0009°,最佳组合方式是横向双UWB标签布置,基站间距3 m,标签间距3 m。
3)室外动态试验结果表明:横向偏差和航向偏差的位姿检测精度略有降低,但横向偏差检测精度误差仍然保持在10 cm以内,航向偏差检测精度不大于3°,最大变异系数不超过10%,符合大田导航作业的精度需求。
本研究的改进AOA模式农业机械无人驾驶导航参数检测系统可以实现横向偏差和航向偏差高精度检测。影响自主导航参数检测精度的因素较多,其中主要有传感器自身精度、信号数据失效和传感器布置安装精度,针对上述因素,下一步拟开展冗余信息处理、失效容错机制判断和惯性测量模块融合校正算法等研究,以提高自主导航参数检测精度,为研制大田环境下高精度和低成本农业机械自主导航系统奠定基础。