基于模糊PID的汽车空调控制器设计
2021-10-09杨萍萍
杨萍萍,马 亮
(1.北京科技大学高等工程师学院,北京 100083;2.北京科技大学顺德研究生院,佛山 528399;3.北京科技大学自动化学院,北京 100083)
0 引言
汽车是当今人们生活中必不可少的一部分。根据《人民日报》报道,2019年全国汽车保有量达2.6亿辆,其中新注册登记汽车2 578万辆,居于全球前列[1]。汽车空调系统作为衡量汽车安全性的重要指标之一,能够改善车内空气温度、湿度和清洁度,为驾驶员和乘客提供良好的空气环境,保障安全、高效行车。汽车空调系统的发展主要经历了独立制暖阶段、独立制冷阶段、冷暖一体式阶段、自动控制汽车空调以及微型计算机控制阶段[2]。随着能源紧张和环境污染问题日益突出,对汽车空调的控制系统也提出了新要求,不再是简单地实现制冷制热功能,而是更为合理、严谨和科学的系统工程。因此,对汽车空调控制系统的研究、优化和创新成为了整个汽车产业关注的焦点。
目前的汽车空调控制系统可分为两类。第一类汽车空调控制系统是开环系统,即输出输入之间没有反馈回路。这类空调广泛应用在经济型车辆上,由使用者完成对空调的控制,方便性和舒适性较低。第二类汽车空调控制系统是以比例积分微分(proportional integral differential,PID)控制器为核心的闭环系统。日本汽车工程师Masatoshi Mituiu将PID控制应用在汽车空调系统中[3],使汽车空调的舒适性大大提升,取得了良好的控制效果。
汽车空调控制系统作为一个典型的非线性控制系统,存在诸多不确定性和随机性。因此,采用对模型依赖极强的传统PID控制器,很难满足使用者的需求,无法获得较好的使用体验。然而,汽车空调系统所具有的复杂性和不确定性,恰好与模糊PID控制器的特点和设计思路相吻合。将模糊控制器和常规PID控制器相结合,在系统变化的过程中由模糊控制器控制PID控制器变化。对于一个变化的被控对象,模糊PID控制器能够一直适应系统的变化,达到良好的控制效果[4-6]。因此,采用模糊PID控制器的汽车空调控制系统将会弥补系统的不确定性,提高系统动态性能,获得更优秀的控制效果。
本文尝试将模糊PID控制器和汽车空调系统相结合,并在MATLAB仿真平台上将其与传统PID控制器在同一汽车空调系统上进行仿真试验,对比性能优劣。
1 汽车空调系统总体热负荷模型
汽车空调系统总体热负荷模型如图1所示。
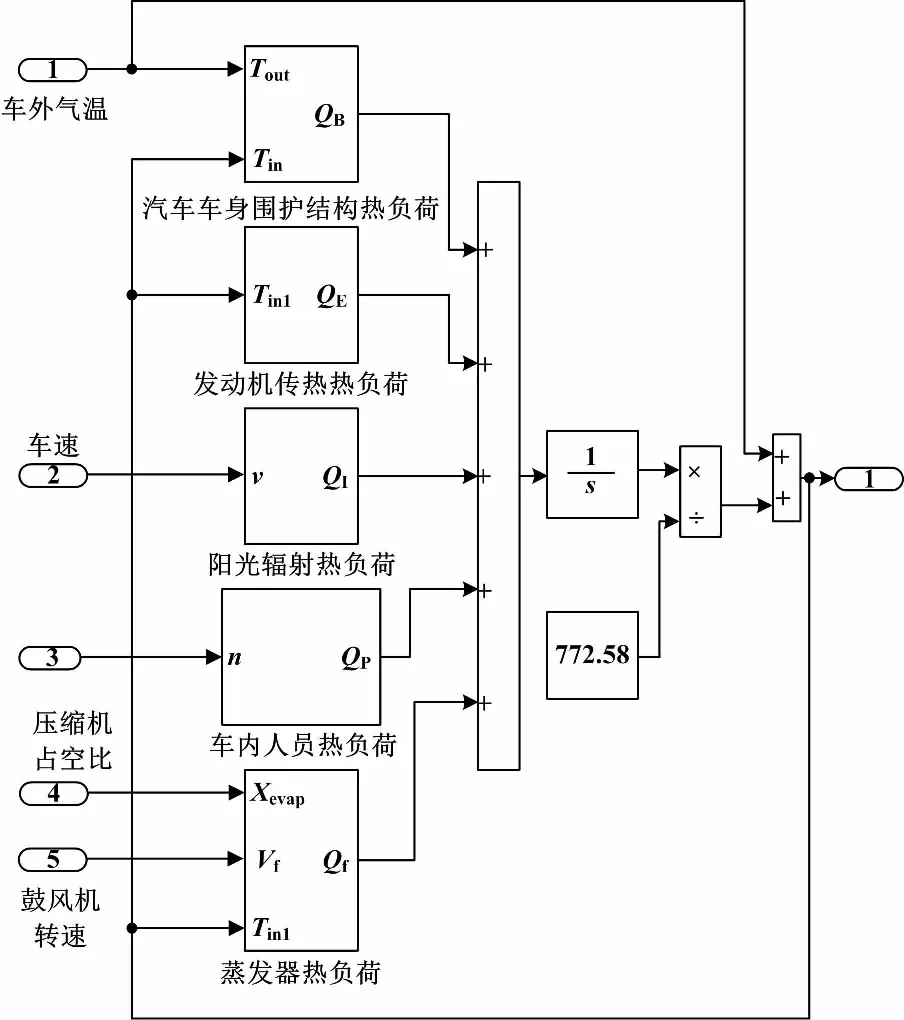
图1 汽车空调系统总体热负荷模型
汽车空调系统由制冷循环系统、空气循环系统和电气控制系统3个部分构成。制冷循环系统是汽车空调系统的核心,主要由压缩机、冷凝器、蒸发器和节流装置4个部件组成[7-8]。空气循环系统的功能是促进空气流动,使制冷循环系统产生的冷气进入汽车室内,起到通风换气作用。其主要部件包括鼓风机、空气净化装置、风栅和必要的通风管道等。电气控制系统是汽车空调系统的大脑,起到控制、调节和优化的作用。在电气控制系统的作用下,冷气循环系统和空气循环系统相互配合、协同工作,实现汽车空调系统调节温度的功能。
热负荷是指空调在制冷过程中需要平衡的热量负荷。汽车空调的热负荷来源可分为内部热负荷和外部热负荷2类。内部热负荷中,车室内定量热负荷QC为:
QC=1 000mΔh=1 000ρVcPΔT′
(1)
式中:m为车室内空气总质量;Δh为车室内空气焓值变化量;ρ为空气密度;V为车室容积;cP为空气比热容;ΔT′为车室内空气温度与设定温度差值。
发动机传热热负荷QE为:
QE=KEFEΔT=KEFE(TEngine-Tin)
(2)
式中:KE为导热系数;FE为发动机前围面积;ΔT为发动机舱和车室内温度差;TEngine为发动机舱温度;Tin为车室内实际温度。
车内人员热负荷QP为:
QP=QDriver+QPassenger(n-1)n′
(3)
式中:QDriver为司机产热量;QPassenger为乘客产热量;n为车内乘客数;n′为人群聚集系数。
蒸发器热负荷Qf为:
Qf=1 000ρvfSfcpKevapλ(0-Tin)Xevap
(4)
式中:ρ为空气密度;vf为鼓风机运转速度;Sf为风机出风口面积;cP为空气比热容;Kevap为蒸发器热交换系数;λ为风速阀门开度;Xevap为占空比。
外部热负荷有汽车车身围护结构热负荷QB,为:
QB=K1F1(Tout-Tin)
(5)
式中:K1为导热系数,取决于车身非透光部分结构与材料等;F1为车身非透光结构面积;Tout为车外空气温度;Tin为车内空气温度。
阳光辐射热负荷QI为:
(6)
式中:I为阳光光强大小;η为太阳能量通过车窗进入车内的比例系数;Fg为垂直于阳光方向的车窗有效面积;K1为导热系数,取决于车身非透光部分结构与材料等;Fs为平行于阳光方向的车窗有效面积;ρg为车身表面吸收系数;αH为车身表面与环境空气换热系数。
根据热力学对流换热准则公式,可得:
(7)
式中:v为车速。
在汽车的使用中,乘客上下车的过程会造成剧烈的热交换。但相对于几十分钟甚至几个小时的汽车空调使用时间,上下车带来的热负荷QD可以被看作是一个脉冲扰动,不同的上下车时间意味着不同的脉冲的幅值,从而实现用数学语言对其进行表达。
热负荷总量QT为以上各类热负荷之和:
QT=QC+QE+QP+Qf+QB+QI+QD
(8)
2 基于PID的汽车空调控制器设计
汽车空调系统是一个两输入系统,其被控变量分别是压缩机的占空比和鼓风机的转速。采用试凑法,得到如表1所示的控制品质最佳的压缩机和鼓风机控制器参数。
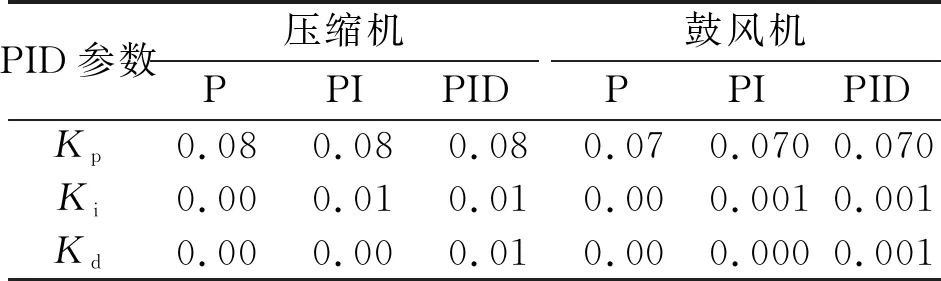
表1 压缩机与鼓风机控制器参数
PID控制器系统如图2所示。
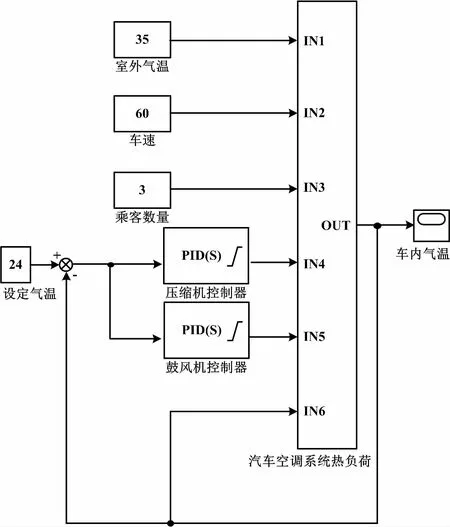
图2 PID控制器系统仿真图
在Simulink中搭建如图2所示的PID控制器系统仿真图,并对压缩机占空比和鼓风机的转速加以限幅,使控制器的输出值满足实际物理要求。将热负荷模型、控制器模型先封装为子系统,再构成汽车空调系统的仿真模型。
在仿真模型中,系统的给定值为用户设定舒适温度24 ℃。系统的变化参数分别为室外气温、车速和乘客数量。通过控制变量法改变这3个参数,可对不同使用情况进行模拟。
①假设在汽车空调使用过程中,固定车速为60 km/h,固定车内乘客数量为3人,室外温度分别为34 ℃、36 ℃和38 ℃。设置仿真时间为500 s,得到如图3所示的变室外温度下的PID控制器仿真曲线。
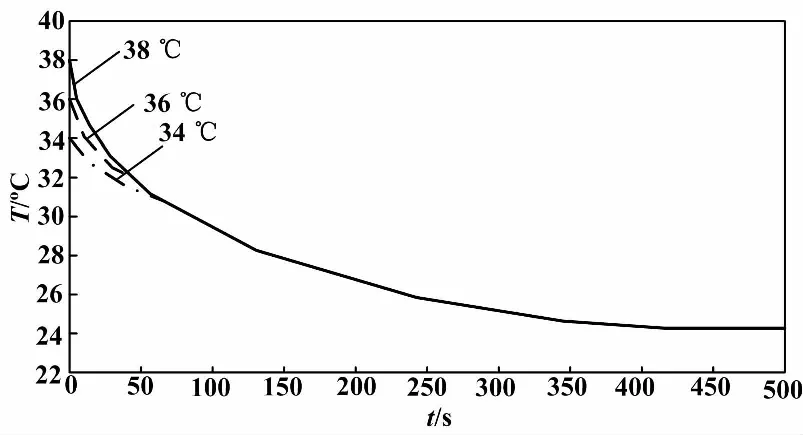
图3 变室外温度下的PID控制器仿真曲线
②假设在汽车空调使用过程中,固定室外温度为36 ℃,固定车内乘客数量为3人,车速分别为20 km/h、60 km/h和100 km/h。设置仿真时间为500 s,得到如图4所示的变车速下的PID控制器仿真曲线。
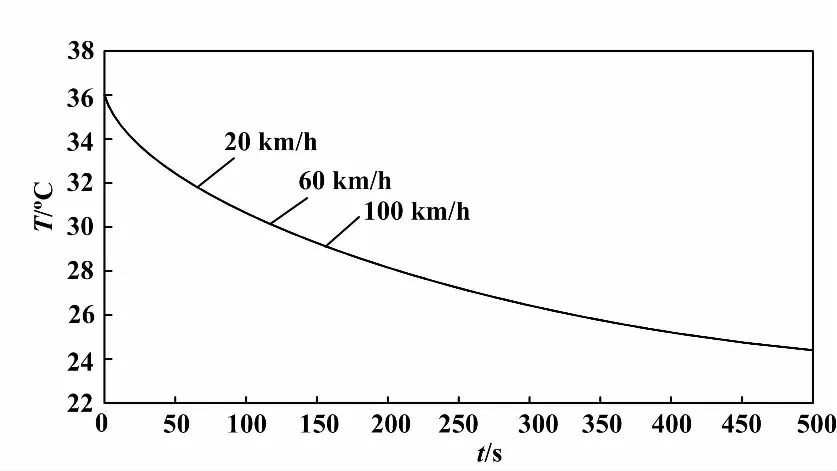
图4 变车速下的PID控制器仿真曲线
③假设在汽车空调使用过程中,固定室外温度为36 ℃,固定车速为60 km/h,乘客人数分别为1位、3位和5位。设置仿真时间为500 s,变乘客人数下的PID控制器仿真曲线如图5所示。
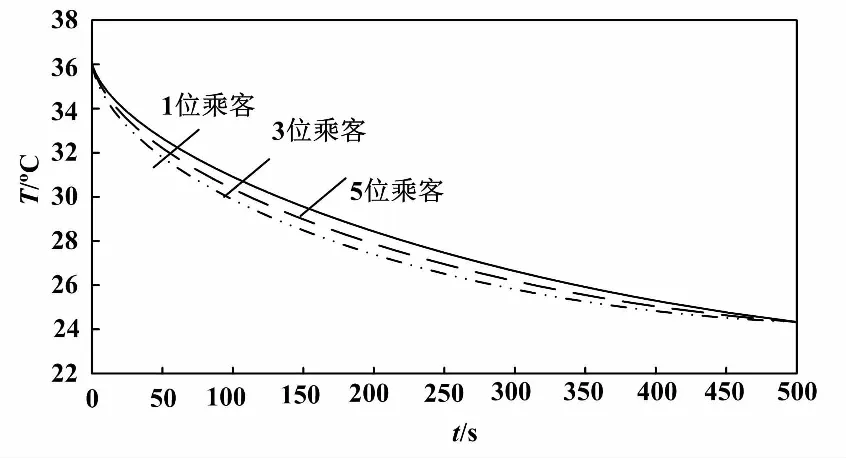
图5 变乘客人数下的PID控制器仿真曲线
总体看来,常规PID控制器作用于汽车空调系统能让系统输出稳定到达设定值,基本能够满足控制要求。但是在不同情况下,系统的调节时间均较长,响应速度慢。当系统变化剧烈(例如乘客数量变化)时,温度变化曲线差异较大,系统鲁棒性较差,整体控制效果还存在优化的空间。
3 基于模糊PID的汽车空调控制器设计
选用两输入、三输出的模糊控制器,控制器的两个输入分别为误差值和误差变化率。模糊控制器的输出为PID控制器三个参数的变化值。在PID控制器初始参数的基础上,增加了模糊控制器的输出值,提高了控制器对环境的适应能力。
3.1 模糊化
模糊控制器的输入为输出值和给定值之间的误差值,范围取±4 ℃之间,划分为9个等级。误差变化率的范围在±3 ℃之间,划分为7个等级。若实际使用中温度误差超过变化范围,可将超出的量认定为边界值。对于输出值,它们的论域选取为[-5,5],并将其划分为11个等级,可表示为:
E={-4,-3,-2,-1,0,1,2,3,4}
(9)
EC={-3,-2,-1,0,1,2,3}
(10)
ΔK={-5,-4,-3,-2,-1,0,1,2,3,4,5}
(11)
接着将清晰的论域转化为模糊集合,定义为{负大,负中,负小,零,正小,正中,正大},简写为{NB,NM,NS,Z,PS,PM,PB}。
3.2 确定隶属度函数
隶属度函数一般有三角形函数、梯形函数、正态分布函数、S形函数等[9]。输入变量E中间5条隶属度函数选为高斯型,两侧隶属度函数选为钟形;输入变量EC的隶属度函数,全部选为高斯型;输出变量的隶属度函数选为三角形,并且输出变量的隶属度函数一致。隶属度函数如图6所示。
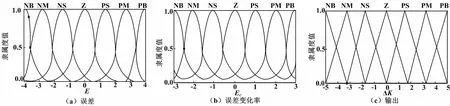
图6 隶属度函数图
3.3 模糊PID控制规则设计
在设计控制规则时,首先应该保证温度能够快速到达设定温度,以满足空调最基本的要求;其次,风速对舒适性的影响较大,因此当实际温度接近设定温度时,应控制鼓风机的风量不要过大,从而提高汽车空调系统的舒适度。
3.4 解模糊
在工业控制领域,主要采用加权平均法进行解模糊[10]。MATLAB能够直接得到输出曲面,如图7所示。
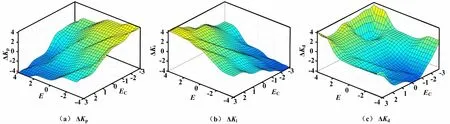
图7 输出曲面图
3.5 模糊PID控制器空调系统仿真
在Simulink中搭建模糊PID控制器的仿真图。经过反复调试,确定模糊PID控制器输入输出环节的比例因数。对压缩机和鼓风机的控制使用同一套模糊控制规则,得到二者的模糊PID控制器结构,并将控制器置于汽车空调系统中。
以空调的热负荷作为被控变量,构建如图8所示的模糊PID控制器系统结构。
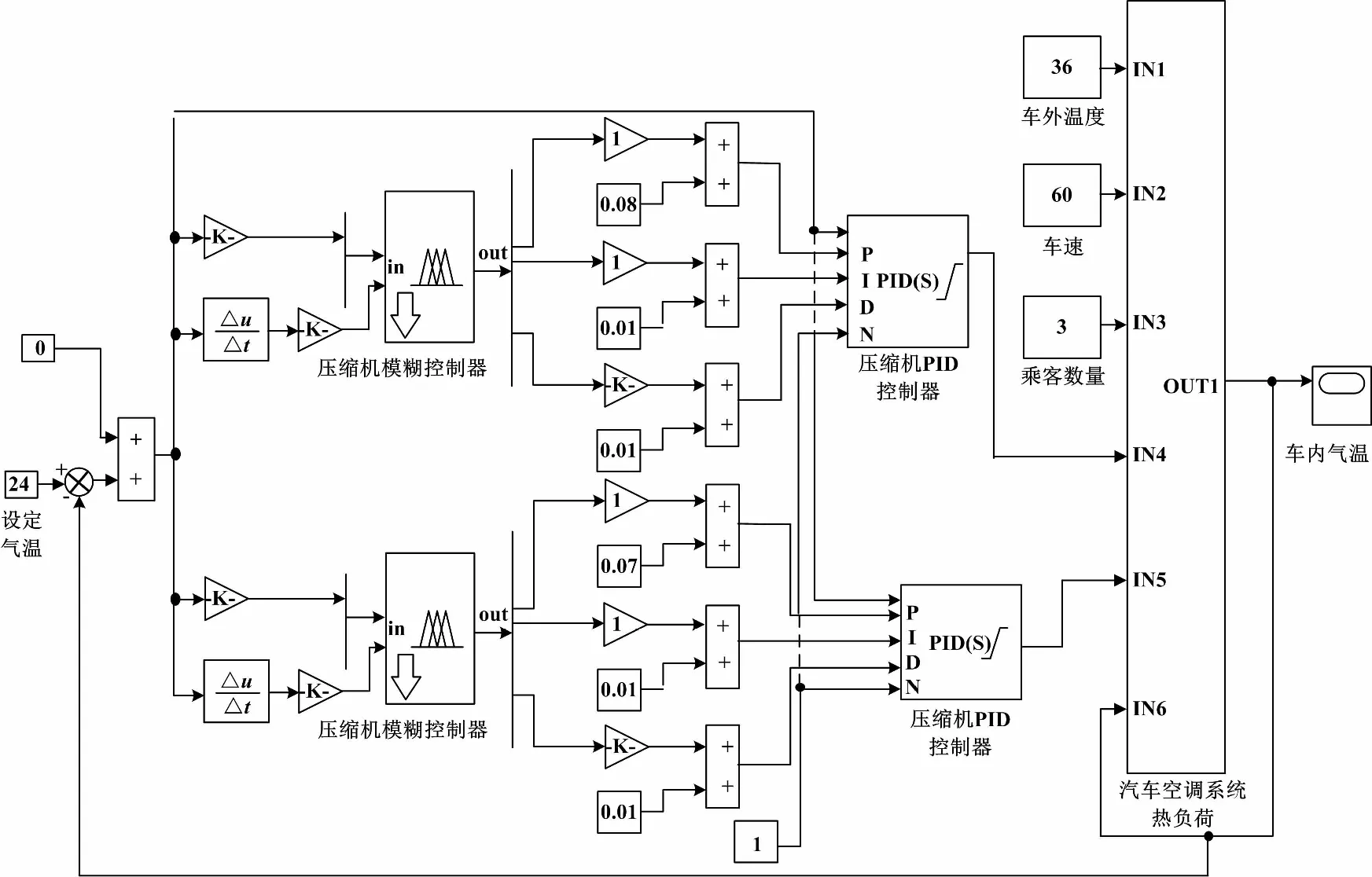
图8 模糊PID控制器系统结构图
在仿真模型中,将系统的给定值设为24 ℃。仍然通过控制变量法改变室外气温、车速和乘客数量这3个参数,对应前面3种不同使用情况进行仿真,得到如图9、图10、图11所示的模糊PID控制器仿真曲线。
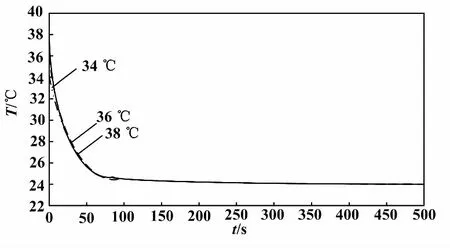
图9 变室外温度下的模糊PID控制器仿真曲线
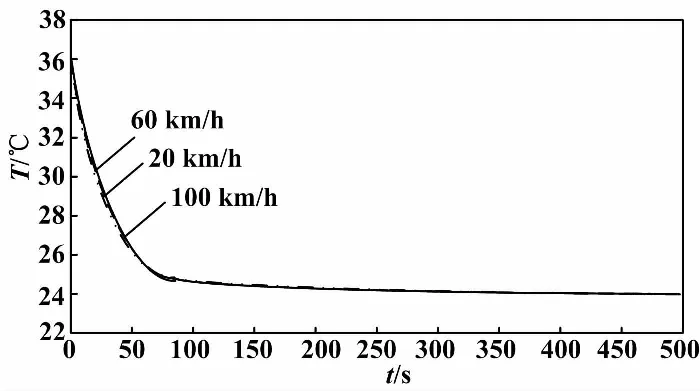
图10 变车速下的模糊PID控制器仿真曲线
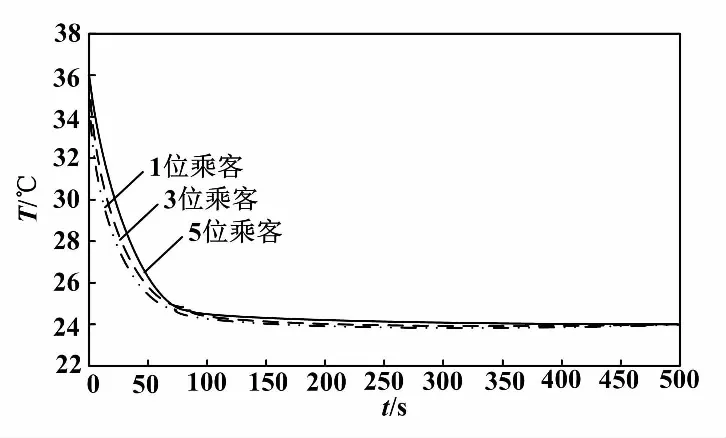
图11 变乘客人数下的模糊PID控制器仿真曲线
从仿真结果可以看出,在模糊PID控制器的作用下,系统能够保持稳定,并且较为准确地到达设定温度24 ℃。当乘客数量不同时,相比于常规PID控制器,3种情况下温度变化曲线的差别较小。温度响应曲线进入稳态值±3%的稳态误差带,即24.7 ℃。当车内有1位乘客时,调节时间大约为95 s;当车内有3位乘客时,调节时间约为100 s;当车内有5位乘客时,调节时间约为105 s。虽然乘客数量的变化对系统响应的影响较大,但是模糊PID控制器能够较好地适应系统的变化,并能根据实时的变化情况时刻对系统进行校正。在不同乘客数量时,调节时间均能控制在100 s左右,系统鲁棒性较好,满足汽车空调舒适度的要求。
对比常规PID控制器和模糊PID控制器的控制品质,假设室外温度为36 ℃,汽车车速为60 km/h,车内乘客数量为3人,仿真时间为500 s,常规PID与模糊PID控制器仿真对比如图12所示。
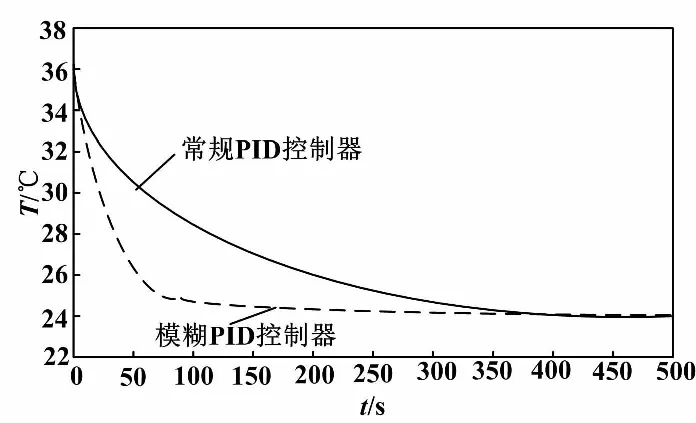
图12 常规PID与模糊PID控制器仿真对比
从图12可看出,首先,在模糊PID控制器作用下,系统调节时间约为100 s。相比于常规PID控制器作用下的调节时间300 s,模糊PID控制器使调节时间缩短为三分之一,系统响应速度大幅提高。其次,在初始的一段时间里,在模糊控制器的作用下,模糊PID控制器的输出控制信号较大,改善系统动态性能;在温度逐渐接近设定温度24 ℃时,在模糊控制器的作用下,模糊PID控制器的参数不断变化,使曲线更加平滑。从响应曲线中可以发现,在稳态误差带内,对于同一温度值,模糊PID控制器的曲线斜率总小于常规PID控制器的曲线斜率。因此,在打开汽车空调初期,使用者会感到空调迅速制冷,符合用户的预期;在温度靠近设定值时,温度变化会更加柔和,能够满足汽车空调舒适性的要求。
总体看来,与常规PID控制器相比,模糊PID控制器作用于汽车空调系统,能使系统有更快的响应速度、更高的鲁棒性、更好的舒适性。因此,采用模糊PID控制器的空调系统更能满足用户对汽车空调的需求。
4 结论
本文根据热力学原理,在MATLAB仿真平台上建立汽车空调系统的数学模型,并设计了常规PID控制器和模糊PID控制器。仿真研究表明,模糊PID控制器在系统动态性能、鲁棒性及空调的舒适性方面相比于常规PID控制器有很大提高,能较好地满足用户对汽车空调的使用需求。然而,本文在建模过程中只选取了较为主要的空调热负荷,舍弃了一些难以量化的参量,造成与实际情况存在一些差异,且仿真试验的现实参考意义有限。未来将在实际设备上进行测试,对模糊PID控制器与汽车空调系统的结合进行更深入的研究。
