跨域作战要素协同中的联合行动控制概念浅析
2021-09-23王小军张修社胡小全韩春雷
王小军,张修社,胡小全,韩春雷
跨域作战要素协同中的联合行动控制概念浅析
王小军,张修社,胡小全,韩春雷
(中国电子科技集团公司第二十研究所,西安 710068)
本文针对美军提出的联合全域作战概念,对其关键环节“跨域协同”在OODA循环中的具体实施——跨域作战要素协同中的联合行动控制进行了定义,并对联合行动控制的对象、层次和目标,联合行动控制的方法、效能等进行了分析,旨在创新性地解读联合全域作战中跨域作战要素协同的联合行动控制内在机理,尝试将杀伤链/网动态重构与作战要素协同理论应用到联合全域指挥与控制环节当中。
联合行动控制;作战要素;跨域协同;分布式作战
0 引言
近年来,美军先后推出马赛克战、海上分布式杀伤、空中分布式作战和多域作战等新兴作战概念,2019年推出联合全域作战(Joint All-Domain Operation,JADO)概念[1],2020年又以空军先进作战管理系统(Advanced Battle Management System,ABMS)为技术基础,提出联合全域指挥与控制(Joint All-Domain Command and Control,JADC2),从顶层上设计全域联合作战概念,其核心能力是在技术实现与运用方面为前述各种新兴作战概念提供实践的平台,并验证诸如自适应跨域杀伤网(Adapting Cross-domain Kill-webs,ACK)等项目的效能与决策辅助能力[2]。联合全域作战中的关键环节是“跨域协同”,就是指在海、陆、空、天、网等不同域协同运用多种能力,给予完成任务所需要的行动自由,使得各域之间互补增效,从而在全域内建立作战优势。联合作战的概念已从传统宏观粗放式战役级军种部队的联合,历经基于网络的集约式作战装备联合的中间状态,最终跃升为一种更快、更细、更低层级的内聚式全域能力的聚合[3]。即是将全域内所有部队的分布式传感器和射手等要素相连接,通过在规模、速度和各层级的分布式任务式指挥,以任务为中心,以分布式智能作战为目标,打破传统军兵种之间界线,从所有作战域中有人/无人作战单元(编队)精选可用作战要素进行快速组合或重组,追求作战效果最优化。据此指挥与行动控制的粒度精细到作战要素。
对于联合全域作战而言,“跨域协同”是精髓,也是关键,更是其薄弱环节[4]。而联合行动控制是联合全域作战行动环节的重要组成部分,是支撑跨域协同的基础,其传统定义也因“跨域协同”下的联合作战概念内涵的跃升不再与之相适应,而成为其薄弱环节中的“痛”点之一。因此,需要针对新型的“跨域要素协同”这种作战需求,通过探索和研究这个作战要素粒度的协同机理,来重新解析或更细粒度地定义联合行动控制的概念。
1 联合行动控制概念
在专业术语中,行动控制隶属于指挥与控制范畴。联合行动在美军《联合作战概念》文件中定义为:运用一支相互依赖的联合部队,在一系列连续与非连续的作战行动中同时和依次迅速运用强于对手的力量;在所有必要的行动点上运用联合力量[5],即在行动上从互不冲突发展到协调一致,作战行动在时间上从依次展开为主发展到同步展开。
在国内一些著名军事理论学术研究中,联合行动控制被解释为:在一体化联合作战中,以夺取制信息权、联合火力打击、快速精确机动和全维一体防护为目的,联合作战指挥员和指挥机关对所属兵力、兵器的驾驭和协调活动[6-7]。
依此,联合行动控制被具体定义为:所属各兵力、作战平台和装备等紧紧围绕决策目标,采取实时、同步、并行和互动的协调控制方式,针对包括作战目标、作战力量、作战时间、作战空间、作战样式、作战手段、作战信息和作战进程等主要控制内容,协调一致地行动,发挥好整体作战效益。同时,联合行动控制是由一系列协调控制活动组成的一个过程。联合作战行动在多域内展开,参战力量和作战编组多样复杂且动态变化,时效性要求很高,因此协调与控制必须是连续不间断地贯穿于全过程,这样才能达成联合行动控制的目的。
至此,联合行动控制的概念阐述倾向于宏观和粗略,仅仅是在战役和战术层面对兵力和平台级别的“人在回路”联合行动或协同行动的表述和定义,指挥与控制二者之间交织模糊。
2 跨域作战要素协同的联合行动控制
目前,美军已经开始在JADC2中验证马赛克战等新兴作战概念的相关技术应用。根据马赛克战概念,“跨域要素协同”的必要条件是各域内平台作战要素解聚(Disaggregation),即传感器—武器等解除绑定,形成作战要素之间的松耦合关系,同时将各域内作战平台分解为像马赛克那样功能各异、高度分散的“碎片”(要素),根据作战任务性质与规模,拼接成跨域协同、自主适应的杀伤网。即在如此条件下,可重构的杀伤网是以作战要素[8]为粒度动态构建而成。
同时,联合全域作战将会广泛运用自主化无人作战平台,使得指挥与控制方式发生变革,任务式指挥和事件式指挥方式更加符合分布式跨域联合行动控制的要求,这就使得联合行动控制更加注重底层要素级的控制粒度。更进一步说,为了使遂行联合行动的各参战部队在计划层面上达成协调一致,需采取非传统指挥方式和AI技术辅助来制定方案和决策,以最大限度地减少人为因素影响。无人作战平台的集群控制和群体协同,有人/无人平台的协同运用,“人在回路上”(Human on the loop)而不是“人在回路中”(Human in the loop)的监督控制,成为联合全域作战行动控制的重点[9]。而在这种“人在回路上”的跨域作战要素的协同中,如何确定指挥决策与控制之间的界线,来更高效地实现人机智能融合也是其关注的要点。
2.1 联合行动任务
联合行动的主要任务是,跨域联合各参战要素,全维、动态地采用攻防一体化的手段,着眼目标薄弱环节,以高速度、高精度方式对其实施结构瘫痪。
2.2 协同控制的对象
在联合行动中,按战役、战术和战斗层次,协同控制的对象逐步由粗化细、由大转小,这里暂且分为兵力、作战平台和作战要素三个级别。本文研究的协同控制对象主要是第三个级别,即分散于各域内的作战要素。依照美军马赛克战概念,此处作战要素就是杀伤网中的马赛克块。
2.3 协同控制的层次
虽然多域战属于战役级,全域战可能上升到更高的战略级,但是无论哪个级别,均寻求通过“跨域协同”将现有的联合作战推向更低、更快和更细致的层次[3,10]。而较高层次的协同控制目标,均逐次向下,围绕底层而为之,即以最低层作战要素的协同控制目的可达为目的,进行本层次的协同控制。因此,跨域作战要素协同控制属于联合行动控制中位于底层的控制,即较微观的、要素级粒度的控制。
2.4 协同控制的目标
针对分布于各域内的作战要素,协同控制目标主要是:杀伤网的动态可重构、作战要素行动一致和协同作战效果最佳。
2.5 协同动作的一致
作战要素行动一致,主要表现在协同动作一致,具体表现为:通过各状态不一致的反馈,及时调整各要素自身动作,如图1所示,在作战时间和作战进程方面确保指挥周期同步,在作战信息和作战目标方面确保态势一致,在作战力量、作战空间、作战样式和作战手段方面确保分布式决策一致和武器协同打击一致。
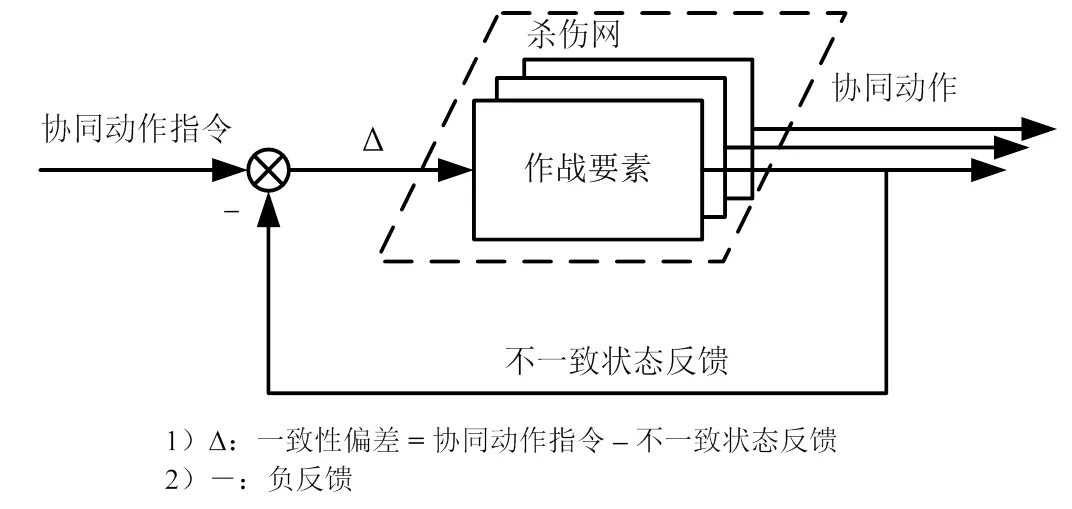
图1 作战要素协同控制
3 联合行动控制方法
3.1 任务式指挥
美军联合全域作战趋向于分散化,其分布式作战特点要求多域内作战要素或作战单元之间跨域有序协同,以应对充满不确定性的作战任务。任务式指挥与全域作战的使命任务变化高度吻合,因而成为首选的指挥控制方式[11-12]。
任务式指挥是指上级通过简洁的命令向下级明确任务和意图,不规定完成任务的具体方法,最大限度地赋予下级在总任务内行使决策自主权和行动自由权。任务式指挥的实质并非单纯的分散指挥,而是一种分散与集中融为一体的指挥方式[13],可谓是“形散神聚”,即作战要素被分散部署,指挥控制与行动效果却是高度聚合的。
3.2 控制代理
在任务式指挥方式下,对于参与分布式决策网络中的C2(Command and Control)节点及决策要素,可以采用控制代理的模式,赋予每个C2节点指挥控制权限,使其完成相关作战要素跨域协同的具体动作。控制代理定义为:对于具体战术行动,根据动态重组的杀伤链/网对C2节点的需求,由某一决策要素行使决策控制权限,对某一特定的战术行动进行指挥控制。如此,譬如可实现地面单兵直接引导空军战机行动(类似美军持久近距空中支援系统(Persistent Close Air Support,PCAS)),战斗机上的传感器直接给水面监控导弹武器提供精确目标指示信息,实现远程数据交战(类似美军对海综合火控制空系统中的空中杀伤链(Naval Integrated Fire Control-Counter Air,NIFC-CA))等等。
3.3 决策与控制的人—机关系
随着AI技术逐渐成熟,系统的自主性越来越强,根据人在控制流程中的地位和作用,针对半自主系统、有监督的系统和完全自主系统三种情况,其控制回路相应分为“人在回路中”、“人在回路上”以及“人在回路外”三种[14],如图2所示。
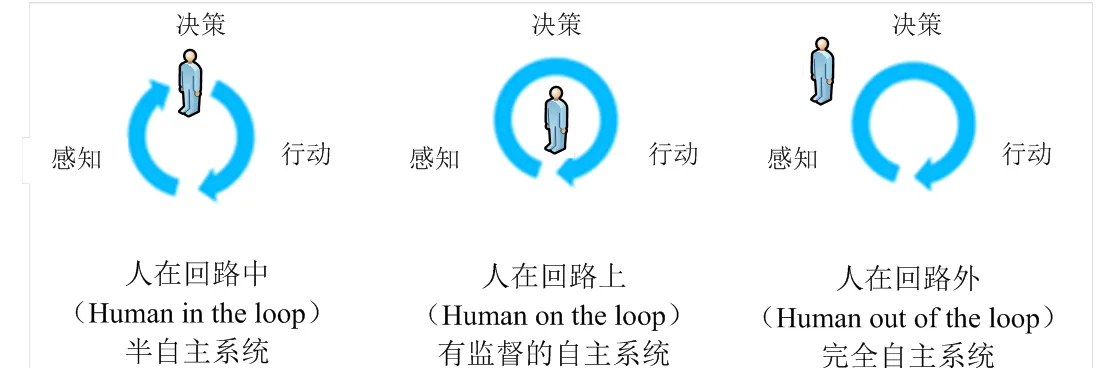
图2 行动控制系统分类
一是由人来控制整体控制流程,即指挥员负责做出决策和实施控制,即“人在回路中”的半自主系统控制回路,目前大部分指挥控制系统都属于此类;二是人处于监视者地位,机器主要负责做出决策和实施控制,即“人在回路上”的有监督自主系统控制回路;三是人完全脱离整个控制流程,由机器做出自主决策和控制,即“人在回路外”的全自主系统控制回路。
现代战场上只有反应神速才能做到“无快不破”。作战要素跨域协同在实时决策的条件下,行动的速度是首要因素,此时,“人在回路中”的迟滞反应已不能适应,而“人在回路上”的有监督自主系统最为适用。但是,当战场环境出现通信网络受阻情况,指挥员无法参与有效决策时,引入完全自主系统则是非常必要的。
3.4 决策与行动的闭环
联合全域作战概念是一种作战概念的大融合,仍然是基于OODA[15]理论,且不同于“通过加速OODA循环以达成作战优势”的传统理念,其更侧重于控制决策(D环节)和行动(A环节)的节奏。通过在决策和行动之间建立自适应的反馈过程(DA小循环)——决策效果体现在行动上,并根据行动结果调整决策,达成扰乱敌方决策目的,使敌方陷入“决策困境”[1]。根据美军ACK自适应杀伤网构建机理以及本文前节所述的“协同控制目标”,决策和行动之间自适应的反馈过程(DA小循环)就是杀伤链/网动态的快速重构、作战要素一致行动和获取最佳作战效果的有效过程,其实质也是联合行动控制所追求的闭环过程,如图3所示。
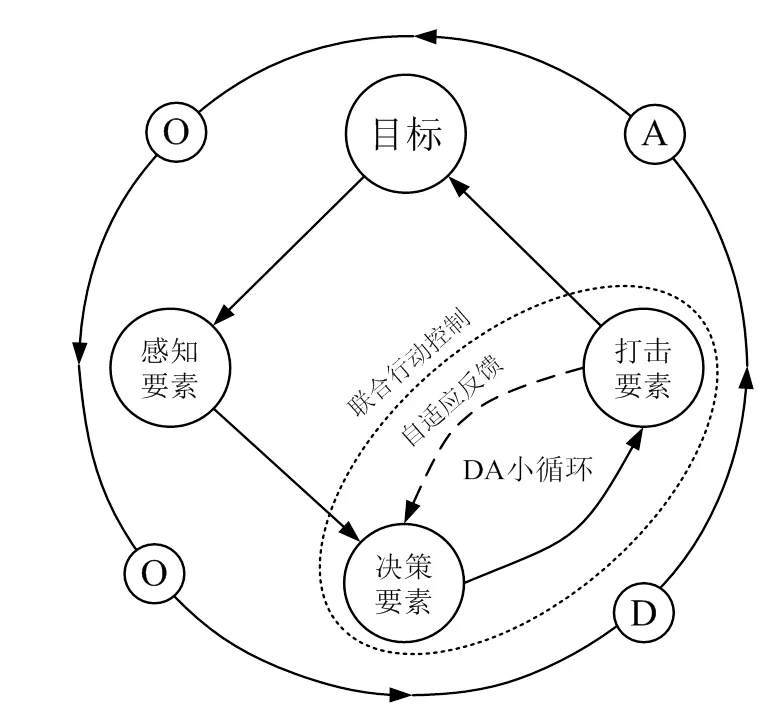
图3 联合行动控制(DA小循环)
对于有监督自主系统和完全自主系统这两种自主系统控制回路而言,在任务式指挥方式下,指挥官负责指挥,AI赋能的自主系统负责控制,根据目标猝发和任务疾速变化,进行自适应反馈,完成杀伤链/网动态重构和目标杀伤,获取作战效能。DA小循环显得简单易行。
对于半自主系统控制回路而言,各个环节均有指挥与控制人员参与,复杂程度就相对比较大。第一步是分布式联合决策,针对战场突发情况,指挥人员通过异地决策、实时反应、上下互动和横向协作等方式完成杀伤链/网重构的指挥决策;第二步是对参与杀伤链/网不同域内作战平台、作战单元、作战要素及其操作人员等作战资源进行平行同步组织;第三步是指控人员聚焦行动任务,对作战要素进行精确协调,完成对目标的杀伤,使作战效能最大化。周而复始,动态循环。
4 联合行动控制的效能
4.1 控制闭环的稳定性
联合行动控制效能的高低,首先体现在控制闭环的稳定性上。在感知—决策—打击整个杀伤链条上,各要素通过联合行动控制要达到横向融合和纵向贯通的境界。所谓横向融合,就是各同类如感知类要素,通过协同控制可使各节点协同完成打击态势的认知;又如决策类要素,通过分布式控制完成对多目标协调分配;再如打击类要素,通过协同控制可以实现软硬武器运用等的打击协同。所谓纵向贯通,就是指各域内感知、决策和打击这三类要素之间,通过跨域协同控制,针对猝发目标随时动态构成杀伤链/网。从这些要素控制闭环上看,受控的状态通常为态势一致性、分布式决策结果一致性和武器控制的一致性,当受控状态不一致时对其进行实时控制时,该系统是稳定的[16]。稳定性越高,联合行动控制效能就越高。
4.2 分布式控制的一致性
联合行动控制的效能还反映在这三类受控状态一致性的误差上。各域内作战要素均以达成共同的作战使命与目标和追求“发现即摧毁”为目的,动态快速构成杀伤链/网,因此在构成的杀伤链/网中的这三种要素必须在允许的时效内协调一致。在OODA大循环中可以看出,从发现目标到武器动作为止,感知与打击要素两者间所体现的作战反应时间基本取决于一致性时延的长短[16]。这就意味着感知—决策—打击要素之间的一致性,在特定时间内其误差大小和一致性高低程度,是联合行动控制效能的关键。
4.3 达到最佳协同的阈值
杀伤链/网中作战要素之间跨域协同的能力和效果,用一种理论模型来定量表示,也是联合行动控制效能的度量方法之一。根据哈肯的协同学原理,分布式作战系统在遂行作战任务过程中涌现出整体效果,及所谓“涌现性”,是系统同步和相变的结果,可以用序参量表示[16],如式(1)所示:

式(1)为原序参量式简化后的转化表述,式中“边总数”为两两有连接关系的节点连接边,“分配节点数”是指被分配打击目标的节点数总和,也是被分配目标的总和。该式由相乘的三个部分组成,第一部分是网络中两两相邻节点的指挥节拍同步指数,即当作战时段趋于无穷大时,任意作战时刻两两相邻节点指挥节拍同步时差的自然指数,在该时段归一化积分值的总和,与两两相邻节点的边总数的比值;第二部分是网络中两两相邻节点之间达到态势一致和任务目标分配一致的归一化指数,即当作战时段趋于无穷大时,任意作战时刻两两相邻节点态势一致性和决策结果一致性差的自然指数在该时段归一化积分值的总和,与两两相邻节点的边总数的比值;第三部分是网络中已分配打击要素杀伤效果指数,即在该作战时段内,各打击节点归一化杀伤效能的总和,与被分配打击目标的节点数总和的比值。当跨域作战要素协同控制即联合行动控制协同效果最佳时,总序参量趋近于临界值,即→1。
5 典型应用示例
为了便于刻画要素协同下的联合行动控制概念,此处以一个典型应用示例来展现跨域作战要素协同联合行动控制过程,将上述章节描述的内涵和外延等片段连接起来,勾勒出其基本轮廓概貌。此处假设一个适应于未来联合全域作战的“海上无人集群ACK系统”。这个系统包含了一类具有探测、攻击等功能的无人机,一类对海对空探测和攻击、反潜等功能的无人艇,以及一类声纳、鱼雷等功能的无人潜航器等共三类作战单元。这些单元均具有智能决策计算与自主协同控制功能,通过弹性的无中心自组织无线通信网络相互连接。该系统属于有监督或完全自主系统,其中部分作战单元被预先指定设置为C2节点,可以在任务式指挥方式下,自适应地将感知和打击节点动态链接起来,具备跨域作战要素同时在空中、水面和水下协同探测能力,以及对空、对海协同打击和协同反潜能力,即可以同时在空、海、潜各域内实现作战要素跨域协同,遂行探测侦察、防空反导、电磁干扰以及火力打击目标等任务。整个跨域作战要素协同的联合行动控制过程如图4所示,具体步骤如下:
(1)在指挥舰席位的海上无人集群ACK系统指挥官,以任务式指挥方式下达简洁的战役级命令,向下级明确作战任务和意图。随后,海上无人集群作战力量被投送到指定的作战区域;
(2)海上无人集群ACK系统中具备决策能力的C2节点根据作战任务与力量包分配需求,以决策中心战为导向,在无人作战单元和作战要素构成的能力市场内,通过招投标方式完成作战资源的优选。这一步骤也可以通过基于作战任务的智能化的杀伤链重构算子映射来匹配满足作战需求的无人机、无人艇和无人潜航器等作战单元资源;
(3)海上无人集群ACK系统中具备决策能力的C2节点细化作战任务,通过分布式自主决策技术,在空、海、潜作战空间内,构建生成具有作战样式、作战手段的,能够灵活应对多种、多重目标的,分别由具有感知、决策和打击要素的无人机、无人艇和无人潜航器等作战单元构成的杀伤网;
(4)在遂行具体作战任务时,杀伤网中作战要素之间的协同控制成为海上无人集群ACK系统内各域内作战单元集群联合行动控制的主要内容,包括:态势一致性、分布式决策结果一致性和武器打击的一致性控制。即这三种要素必须在允许的时效内同步协调一致,一举摧毁发现的目标;
(5)当发生目标突现情况,或有新的作战任务下达时,海上无人集群ACK系统中的C2节点随即自主进行杀伤网自适应重构动作,即自动转入步骤(2);
(6)在跨域作战要素协同联合行动控制循环的整个过程中,从其协同控制内在机理和整体效能来看,海上无人集群ACK系统构建的杀伤网中感知—决策—打击要素之间的协同一致性变差,即协同系统序参量远离临界值时,也将是进行动态重构的主要因素。因此,在序参量役使下将使得海上无人集群ACK系统趋于最佳协同阈值,即动态重构的杀伤网效能最大。例如:对于海上无人集群ACK系统构建杀伤网中的某一条空中杀伤链,理论上序参量趋近于1。而实际上,指挥同步指数为0.99,态势一致性为0.98,决策结果一致性为0.99,杀伤效果指数为0.75,序参量实际值为:=0.99×0.98×0.99×0.75=0.72,表明该杀伤链的实际协同效能达到理论值的72%,属于一般状态,若下降至低于设置的重构阈值,海上无人集群ACK系统中的C2节点随即自主进行杀伤链自适应重构动作,即自动转入步骤(2)。
无论是突现的目标猝发新任务,还是协同效能降低引发的控制反馈,自动转入步骤(2)就是自适应反馈形成的DA小循环,使得海上无人集群ACK这样一个AI赋能的自主系统,可以根据目标猝发和任务疾速变化,以及杀伤网自身的协同程度,进行自适应反馈,完成杀伤链/网动态重构,获取最大的作战效能。
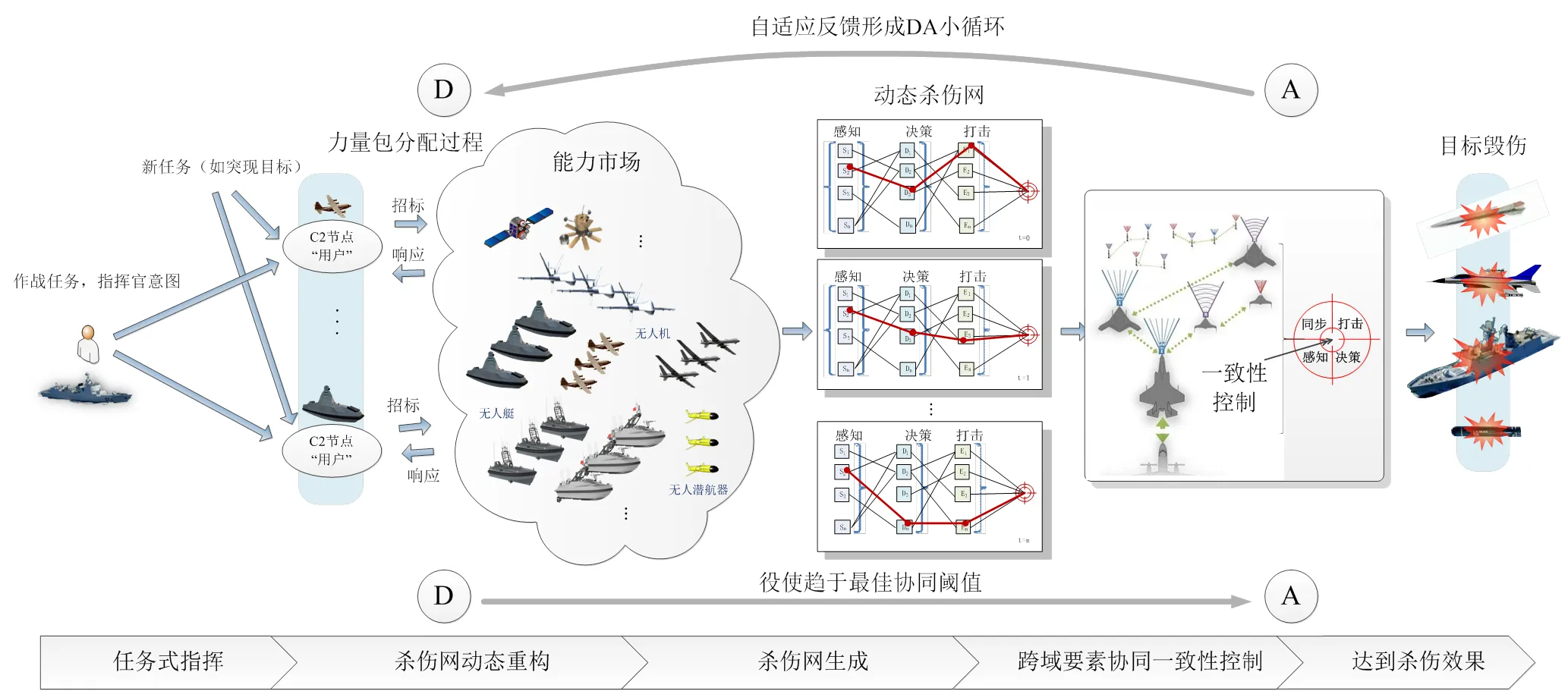
图4 典型应用示例示意图
6 结论
综上所述,联合行动控制在联合全域作战的要素跨域协同中,主要体现在以下两个方面:
(1)在OODA大循环中,根据任务式指挥和自主系统的特点,构建决策和行动之间自适应的反馈过程,也就是DA小循环,目的是应对突发情况以及为制造“迷雾”等进行杀伤链/网动态快速重构,通过要素跨域协同获取最佳作战效果;
(2)在已构建的杀伤链/网中对跨域的感知、决策和打击三类要素的状态或结果进行一致性控制,目的是使受控作战要素状态快速收敛于实时决策指令,并使得由作战要素跨域协同所构成的杀伤链/网的协同效能达到最佳,序参量趋近于临界值。
因此,跨域作战要素协同的联合行动控制可定义为:作战域内所属有人/无人平台各可用作战要素,在分布式任务式指挥方式下,自适应构建决策—行动反馈过程,以任务为中心,紧紧围绕最佳协同控制效能,实施杀伤链/网动态可重构,以及感知、决策和杀伤作战要素行动协同一致等控制过程,以高速度、高精度方式对目标实施结构瘫痪。
本文针对美军提出的联合全域作战概念中的关键环节“跨域协同”,对支撑其在指挥与控制中如何实施与落地的基础——即联合全域作战中跨域作战要素协同的联合行动控制进行了定义,并对联合行动控制的对象、层次和目标,联合行动控制的方法,联合行动控制的效能进行了分析,旨在创新性地解读联合全域作战中跨域作战要素协同的联合行动控制的内在机理,尝试将杀伤链/网动态重构与作战要素协同理论应用到联合全域指挥与控制环节当中,并对未来全域自主协同作战体系的研发和构建起到积极推动作用。
[1] 陈彩辉,线珊珊. 美军联合全域作战(JADO)[R]. 学术plus,2020.
[2] 庞娟. 美军联合全域指挥与控制发展分析[R]. 海鹰资讯,2021.
[3] 张弛. 从“多域战”到“全域战”——对美军作战概念转型的理论思考[J]. 知远防务评论,2020,6(41):455-461.
[4] 吴敏文. 联合全域作战:美军作战新构想[J]. 军事文摘,2020.
[5] 胡田疆,申建桥,唐凯. 美军联合作战新构想蕴含的动员思想[J]. 国防科技,2010,8(33):911-915.
[6] 任海泉. 孰执龙头——一体化联合作战指挥研究[M]. 北京:国防大学出版社,2006.
[7] 王及平. 一体化联合作战研究[M]. 北京:军事科学出版社,2005.
[8] 王小军,张修社,胡小全,等. 基于杀伤链感知的动态可重构作战体系结构[J]. 现代导航,2020,11(6):415-421.
[9] 戴浩. 人工智能技术及其在指挥与控制领域的应用[C]. 2018国际人工智能与机器人科技峰会,2018.
[10] Renewed great power competition: implications for defense–issues for congress[J]. Congressional Research Service, 2019, 31(6):1871-1877.
[11] 陈留哥. 任务式指挥的培养目标和路径——美军对联合作战体制的反思与启示[J]. 军鹰资讯,2019,5(10):447-451.
[12] 张维明,黄松平,黄金才,等. 多域作战及其指挥控制问题探析[J]. 指挥信息系统与技术,2020,4(11):1101-1109.
[13] 曹继锴,于淼,王建立. 集中还是分散?——美军任务式指挥解析[J]. 国防科技,2015,5(15):144-149.
[14] 于全. 从“网络中心”到“决策中心”——解读美军马赛克战(MOSAIC WARFARE)[C]. 第八届中国指挥控制大会,2020.
[15] J Boyd. A discourse on winning and losing. Maxwell Air Force Base[M]. AL, USA: Air University Library Document, 1987.
[16] 王小军,张修社,胡小全,等. 分布式作战系统要素协同控制理论与方法[J]. 现代导航,2020,11(4):235-243.
Brief Analysis of Concept of Joint Actions Control in Synergy of Cross-Domain Operational Elements
WANG Xiaojun, ZHANG Xiushe, HU Xiaoquan, HAN Chunlei
According to the concept of JADO, the paper defines Joint Actions Control (JAC): the implementation of “cross-domain synergy” in the OODA cycle, and the object, level and goal of JAC, the method and the effectiveness of JAC are analyzed. The purpose of the paper is to interpret the internal mechanism of JAC in JADO, and to apply the dynamic reconstruction of killing chain/net and the cooperative theory of operational elements to the JADC2.
Joint Actions Control; Operational Elements; Cross-Domain Synergy; Distributed Operations
E072
A
1674-7976-(2021)-04-235-07
2021-04-12。王小军(1962.02-),浙江丽水人,研究员,主要研究方向为综合电子信息系统和智能控制技术。
