站台门防踏空自动翻转踏板翻转机构设计及优化
2021-09-15刘军郑伟黄中全
刘军 郑伟 黄中全




摘 要:地铁站台门机电式防踏空自动翻转踏板已在某城市地铁车站进行了试装,取得了较好的效果。本文主要总结分析了站台门防踏空自动翻转踏板的翻转机构的设计及优化过程。
关键词:城市轨道交通;站台门;翻转机构;机械
中图分类号:U231.4 文献标识码:A
0 引言
随着城市轨道交通的发展,站台门系统的运用也日趋广泛。然而,列车停站时由于设备限界的要求车门门槛与站台门门槛之间存在一定的间隙,乘客可能踏空受伤。为解决这一安全隐患,目前传统防踏空方式是在站台门门槛上安装一种梳齿状的弹性胶条,该弹性胶条有足够的刚度,能承受乘客的重量,当列车因行驶摆动与弹性胶条相撞或刮擦时,梳齿状弹性胶条可变形吸能,不至对列车造成严重伤害。弹性胶条具有较强的刚度,虽然有锯齿状前端做保护,但列车与胶条相撞时,列车仍会有较大的颠簸,存在一定安全隐患。
笔者及同事们设计了一种防踏空自动翻转踏板[1],并在车站进行了试装,取得了较好的效果。本文主要總结分析了该踏板的翻转机构的设计及优化过程。
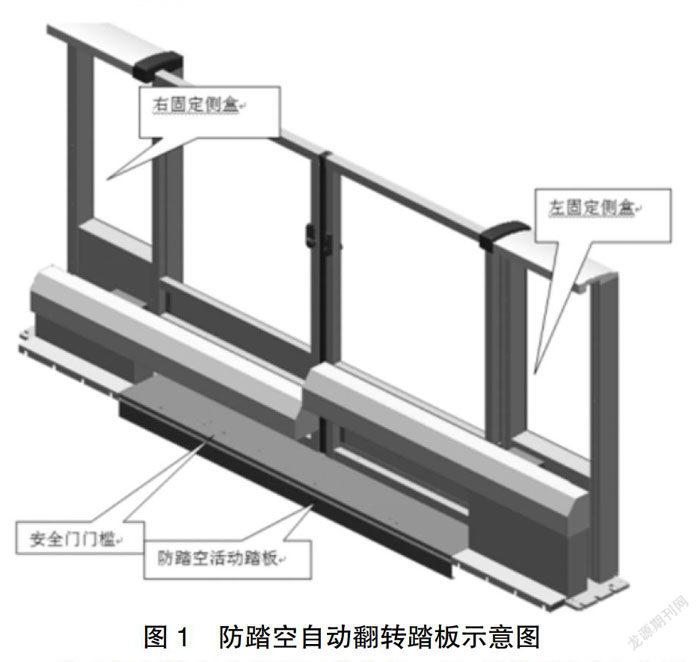
1 踏板整体设计原理
滑动门门槛下方设置承载支架,活动踏板通过多连杆铰链与滑动门门槛底部固定,能够承载由于乘客通过踏板时产生的载荷及扭矩。活动踏板作为安全门整体的一部分,与滑动门的开关保证可靠的联动,车进站后安全门开门时,活动踏板在翻转机构的作用下自动翻出与门槛平齐,此位置多连杆铰链过死点,确保活动踏板不会在停电或者外力作用下而落下。
2 翻转机构设计
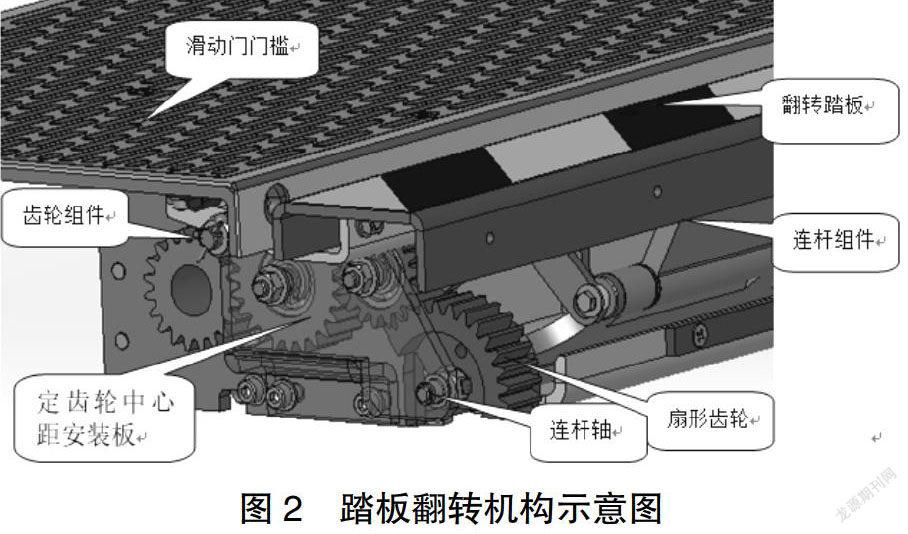
翻转机构由电机、齿轮、扇形齿轮等组成,活动踏板翻出或收起时,电机驱动齿轮旋转带动固定在多连杆铰链上的扇形齿轮动作,详见图2。
另一端设置检测开关检测活动踏板翻出或收回的位置。同时设置紧急手动解锁装置(紧急手动解锁装置设置在固定侧盒内),确保在发生故障时,通过紧急手动解锁装置通过钢丝绳将活动翻转踏板拉过死点,用脚一踩,使活动翻转踏板收回,不妨碍列车的正常运行。
3 故障分析
为验证翻转机构的可靠性,课题组依据相关规范对该装置样机进行了疲劳测试(一百万次翻转测试)。在测试进行到约31万次时,自动翻转踏板主轴连杠轴出现了折断,同时连杆也出现了断裂,测试中止。
课题组对连杆断裂的原因进行了详细的分析:
(1)如图2所示:生产制造过程中会存在误差,会出现连杆轴和定齿轮中心距安装板不在同一轴心线上,在翻转踏板运行的过程中,出现连杆轴窜动现象,导致连杆轴断裂现象。
(2)由于受安装空间影响,动力输出只能设置在连杆铰链组件一端;且连杆铰链组件长度较长约为1.6 m,属于悬臂式动力输出铰链结构;因此,在动力输出端其承载的扭力较大。详见图5。
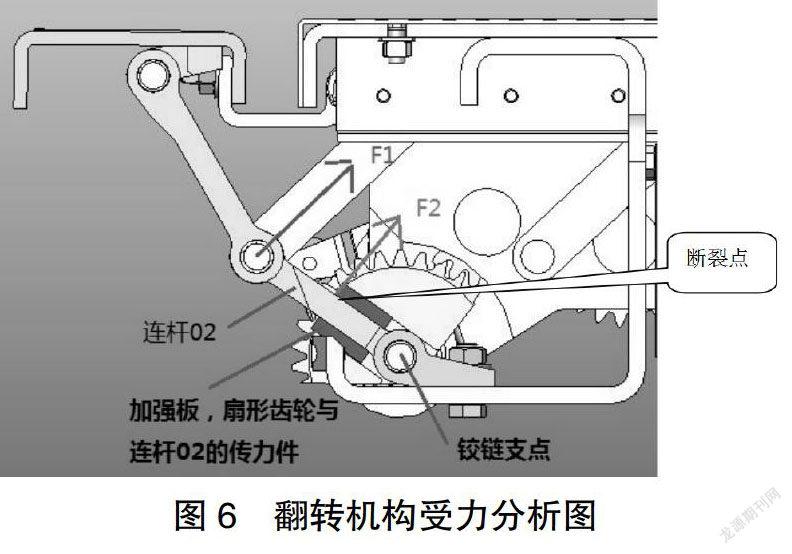
(3)如图6所示,当踏板需要回收时,通过电机输出动力,齿轮旋转,将铰链点2往F1方向进行运动,已实现解除死点锁闭的功能,由于涉及踏板回收后的空间影响,加强板位置短于铰链点2;处在连杆02的中间位置(F2),因此在同样扭矩作用下,F2应力将大于F1处。
4 设计优化
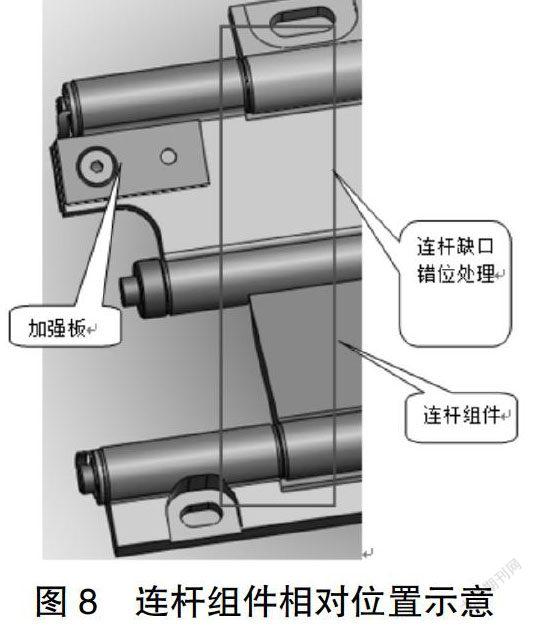
(1)直接将齿轮组件做成一个箱体形式,用扇形齿轮与连杆型材连接,在型材上增加2个加强板以增强连杆型材的强度;同时将连杆组件的相对受力位置错开,避免受力集中现象。详见图7。
(2)将连杆组件的相对受力位置错开,避免受力集中现象,详见图8;进一步优化整体安装空间,将加强板及连杆02整合优化设计;承载支架缺口尺寸加大,避免与连杆02进行碰触。
对样机优化后试制的新样机重新进行了疲劳测试,顺利完成了一百万次的疲劳测试,测试过程中未出现重大故障,测试后状态正常。
5 总结
(1)机械装置在组装完成后安装到现场前,一定要进行组装后疲劳测试,以验证设计方案的可靠性以及疲劳寿命。
(2)安装空间小,部件之间容易形成干涉。在设计时要多运用受力分析及仿真技术,尽量使设计方案合理。
(3)多运用整体装配式设计,以便于安装和维护。
参考文献:
[1]彭昊,刘军,杨石山.地铁站台门机电式防踏空自动翻转踏板的设计杨石山[J].2018(3):127-129.
[2]GB 50517-2013,地铁设计规范[S].
