城市快速路协同控制方法优化研究
2021-09-15程可
程可

摘 要:本文基于快速道路传统控制方法,以城市快速路段为研究对象,对匝道控制与可变限速控制协同应用进行研究,提出一种新的城市快速路控制策略,仿真结果表明该策略能够有效改善控制路段交通流运行状态。
关键词:城市快速路;交通瓶颈;协同控制;匝道控制;可变限速控制
中图分类号:U491 文献标识码:A
1 研究基础
1.1 国内外研究现状
1.1.1 匝道控制
匝道控制按照控制范围划分,可分为单点控制与协同控制;按照控制方式划分,可分为定时控制与感应控制。根据选取控制参数的不同,感应控制又可以分为需求-容量控制、占有率控制以及可接受间隙控制。
国外研究主要集中在以下方面,Wattleworth等提出一种定时控制方法,以流入流量最大为目标函数,道路通行能力为约束控制入口匝道的调节率。由于定时控制是一种静态控制手段,匝道调节率根据历史数据预先设定,面对交通状况快速变化时控制效果较差。Papageorgiou等基于经典自动控制理论,提出一种以占有率为控制变量的匝道单点反馈控制算法ALINEA。
国内学者中,杨晓光等[1]较早开展关于城市快速路交通控制的相关研究,以线性规划方法为基础,同时考虑进出口匝道排队约束、主线通行能力约束以及行驶速度约束,提出了城市快速路流入交通的动态控制手法。郑建湖等[2]对不同的匝道控制策略分类比较,分析了不同类别策略的优缺点及其适用范围。郑飞等[3]考虑城市快速路与高速公路之间的差异,基于ALINEA进行扩展,引入匝道交通状态控制阈值和匝道排队分段约束,提出一种入口匝道单点动态控制策略。
1.1.2 可变限速控制
可变限速(Variable Speed Limit, VSL)控制方法最初应用于高速公路,属于一种主线控制的手段,通过改变道路限速值调节道路交通流状态,使车辆速度尽量保持一致以便交通流能够稳定运行,减少走走停停现象,提高道路安全性与道路吞吐量。
Alessandri等基于反馈控制提出一种改进的可变限速控制策略,利用仿真验证该策略可以预防和减少拥堵的作用;Lin等提出两种VSL算法,分别通过降低上游排队长度来减少延误,提高VSL控制区总吞吐量来减少总时间花费改善交通状况。Juan等将高速公路拥堵划分为需求驱动、供给驱动两类,并利用计算机仿真验证实施VSL对这两类拥堵的改善情况;陈大山等[4]对METANET模型进行扩展,增加速度引导作为控制变量,建立快速路速度引导预测模型。
1.2 研究现状评价
传统匝道控制方法通过调节匝道控制律控制进入快速路主线的车辆数,容易导致匝道排队溢出。可变限速控制技术能够调节道路交通流运行状态,但道路流量接近饱和时,可变限速控制的调节效果有限。匝道控制、可变限速控制在单独实施的情况下效果有限,但前者能够有效控制进入快速路的流量,而后者在一定限度内对交通流运行有良好的调节效果。协调匝道控制和可变限速控制能够使两者技术优势,达到更好的控制效果,由此笔者提出将上述两种控制方法结合的快速路协同控制模型。
2 快速路协同控制模型
2.1 工作机理
道路交通流密度较小时,不必对交通流进行管控也能维持良好运行;而当道路超负荷供给时,需要进行入口匝道控制,对进入快速路的流量进行限制,防止快速路交通状况进一步恶化。可变限速控制基于感知路况变更路段限速值,使车流速度趋于一致,以保证路段交通流稳定运行。
本文构建了快速路控制系统,控制系统由路况感知系统、匝道控制系统以及可变限速控制系统组成。在快速路瓶颈路段上下游以及入口匝道处分别设置交通流检测器;通过各组交通流檢测器判断快速路瓶颈处交通状况,根据道路交通拥堵情况实施控制措施,疏解拥堵,稳定交通流。VSL控制区上游设置可变信息板,发布道路限速提示以及智能匝道可用性信息,对驾驶员的交通行为进行引导。
2.2 模型建立
2.2.1 路段模型
由于METANET模型能够较好描述复杂交通现象且在实践中验证了模型的鲁棒性,本文采用该模型描述道路交通状态。快速路网由有向图表示,网络的节点表示交叉口、道路几何形状发生明显变化的位置以及匝道和匝道的延伸;有向弧表示快速路网中一段连续的、几何形状相似且无道路分岔或汇聚路段;每个路段等分长度为、车道数为的个子段,子段的交通状态由路段密度、交通流量以及平均速度表征,相关参数的计算如下:
(1)
(2)
——时段路段子区段的交通密度;
——时段路段子区段的平均速度;
——时段路段子区段的流量;
——时段路段的稳态速度;
——离散时间步长,通常取10 s。
2.2.2 起点模型
起始节点接收交通需求,流量由此进路快速道路,考虑快速路主线流量与入口匝道的不同性质,加入流量约束进行建模。起点路段可表示为路段的第1个子段。
(3)
式中,——时段起始节点处的流入流量;
——时段起始节点处的交通需求;
——时段路段第1个子区段速度决定的最大流入流量(veh/h)。
进行协同控制时,应当充分考虑驾驶员对于动态限速信息的接收与执行过程。当变更后限速值与路段当前交通流速度差距过大时,将导致路段车辆之间速度差进一步加大,引发交通安全事故。
因此,模型的目标函数由成本项与惩罚项这两部分组成。成本项是道路网络中车辆的总旅行时间TTT;惩罚项的作用是抑制可变限速信号发生突变,使控制信号尽量平滑,防止产生冲击波使交通状况恶化,保障快速路段的交通安全。目标函数中成本项与惩罚项的重要性由各项的相对权重表示。
(4)
式中,——恒定参数;
——路段的可变限速值与路段自由流速度之比。
2.3 优化结果
根据前述模型优化结果,进行仿真分析。本文选取成都市三环快速路进行研究。对交通流数据进行处理后所得结果如下表所示。
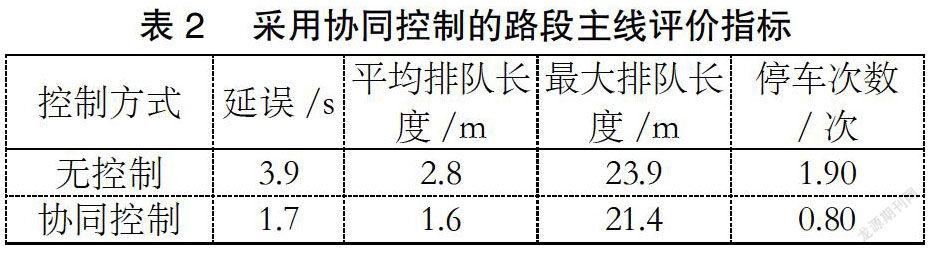
利用VISSIM对高峰时段道路交通状况进行3 600秒仿真后得到的相关评价指标,如表2所示。
3 结论
对比实施协同控制前后的行程时间与流量情况,采取协同控制后快速路主线行程时间明显缩短,但辅路行程时间有所增加;但主线流量、辅路流量均减少。从仿真评价结果中可以看出,采取协同控制后,快速路段主线的延误、停车次数、平均排队长度均有明显下降;最大排队长度有所减少。
究其原因,采取协同控制后,由于匝道控制的限制,进入快速路主线的流量减少,协同实施可变限速后促进快速路主线车辆实现车速均质化,进一步改善了路段交通流状态,因此主线行程时间、延误、停车次数、排队长度等指标均有明显下降。另一方面,限制进入主线的流量对快速路辅路造成了更多的交通压力,使辅路拥堵程度上升,导致辅路行程时间增加,流量有所减少。
综合来看,协同控制策略对快速路主线交通流优化效果较好。不足之处在于实施匝道控制容易导致匝道排队溢出而影响辅路的通行能力,未能充分考虑对于辅路用户的公平性及其满意度,未来将进一步研究。
参考文献:
[1]杨晓光.考虑进出口匝道排队约束的城市快速道路交通系统动态控制方法[J].西安公路交通大学学报,1999(2):22-28.
[2]郑建湖,董德存,陈洪.城市快速路入口匝道控制策略比较分析[J].计算机测量与控制,2006(2):196-199.
[3]郑飞.杜豫川,孙立军.基于ALINEA算法快速路入口匝道单点动态控制[J].同济大学学报(自然科学版),2009(6):766-771.
[4]陈大山,孙剑,李克平.城市快速路速度引导预测控制模型[J].交通运输工程学报,2012(1):102.
