用于调控中心自动化智慧机房的机器人巡检控制系统分析
2021-09-10陈江尧俞佳乐陈冰恽杨健一陈明强汪力
陈江尧 俞佳乐 陈冰恽 杨健一 陈明强 汪力
摘要:控制系统是基于主体、客体以及媒体综合构成的一种综合控制体系,其最终目的是保证控制对象满足期望需求或实现其在某些方面的功能提升和管理。本文就基于调控中心自动化智慧机房巡视、检查的需求,基于机器人的前提下,设计用于机器人控制系统,实现机房环境的巡检、监控等,实时掌握调控中心自动化智慧机房的整体情况,例如消防巡检、防盗巡检等,保障调度中心自动化智慧机房的安全、稳定地运行。
关键词:调控中心;智慧机房;机器人巡检;控制系统
1 系统架构
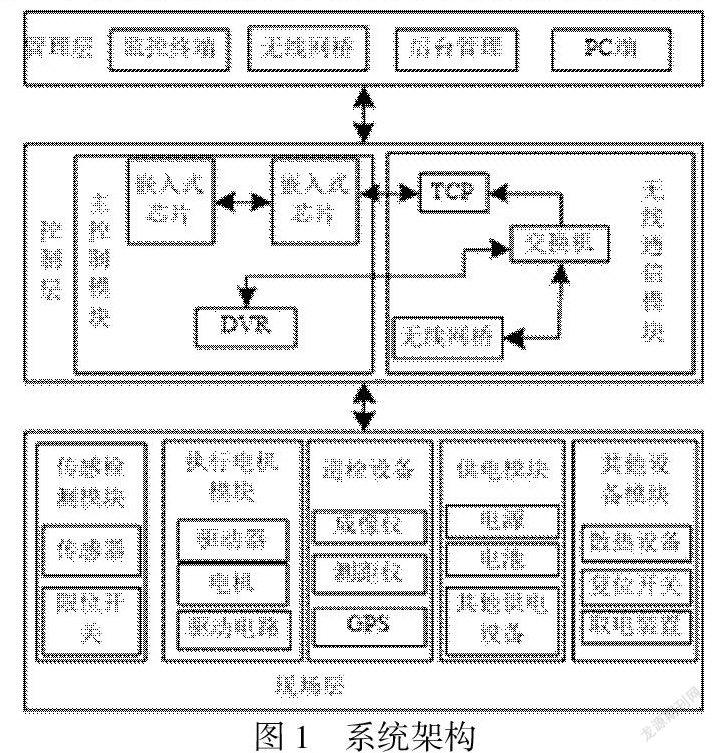
该巡检系统以分布式控制的方式完成调控中心自动化智慧机房巡检。系统的现场层获取巡检区域现场信息和数据,将其传送至控制层,该层通过无线通信模块将现场层获取的数据和信息实行相应处理,通过控制模块向机器人终端下达控制指令,机器人完成指令后,通过无线网络,将结果传送至管理层,实行监控以及管理。系统分为三个层次,现场层、控制层和管理层,其结构如图1所示:
现场层:该层主要包含传感检测模块、执行电机模块、巡检设备、供电模块以及其他设备模块,该层以嵌入式技术部署在机器人终端内,该层也可看作为机器人终端。
(1)传感检测模块:该模块通过数个光电传感器和限位开关组成,用于实现巡检目标设定、障碍物的识别、人员匹配,同时,可用于完成机器人的姿势定位。
(2)执行电机模块:该模块包含驱动器、电机和驱动电路,该模块通过驱动器完成机器人本体的运动控制,同时完成机器人各个关节的协调控制,保证机器人在直线行驶、转弯行驶、加速、减速以及停止操作时稳定、精准控制,实现巡检。
(3)供电模块:该模块包含直流电源、电池以及稳压器等设备,其用于机器人整体运行的电源提供,保证机器人的运行;同时也用于实现网络设备的供电保障。
(4)其他设备模块:该模块包含散入设备、复位开关以及取点装置,其中复位开关是用于机器人复位的控制,该复位指令是由控制层下达。
控制层:该层主要通过主控制器模块和无线通信模块构成,以嵌入式控制芯片为核心,主要完成传感数据的处理、巡检图像处理等;通过通信协议实现与管理层间的通信以及数据传输,可通过该层下达机器人巡检指令[,同时该层也用于保存自主巡检列表的存储。
管理层:该层主要用于系统后台服务部分,实现巡检结果的监控、系统相关设置、维护、管理等,该层包含地面基站和PC客户端,可通过监控显示器查看机器人巡检现场的图片以及视频[11],根据查看结果通过控制层下达相应指令或者处理。
2执行电机模块
巡检机器人的本体控制是由现场层的执行电机模块完成,机器人的驱动主要通过不同类型的板卡,板卡中设有两种通道,分别为转换和计数通道,用于完成各类数据的统计和格式转换;同时还设有开关量输入输出,其为可编程。其中,智能驱动器用于控制机器人的行驶效率以及行驶安全,控制执行是依据设定或者实时指令,通过串口和工控机的连接完成执行命令的传送[12];其他部分的控制通过驱动器组完成,但其不用于控制速度伺服,工控机的加、减速,行驶方向和刹车的控制,通过D/A等控制驱动器实现。
3嵌入式芯片
机器人在巡检过程中轨迹跟踪的实现是以该芯片完成。其轨迹跟踪包含两部分,分别为速度跟踪、轨迹跟踪。两者均嵌入在机器人内部,通过主机对其实行控制[13]。主机完成轨迹设定后,将其传送至控制器,速度控制器接收速度控制指令,其来自由轨迹跟踪器;输入电压通过电机的驱动完成输入,完成机器人巡检的轨迹跟踪。
嵌入式芯片作为驱动核心,电机驱动是基于其控制完成,文中选择输出时最大电流可达到5 A的MC33886芯片。为保证良好的驱动效果,需连接两块同样型号的芯片,以并联模式完成,可将最大输出电流提升一倍,达到10 A。
依据PWM信号完成芯片的驱动,PWM的扩展通过单片机完成,并且通信的实现是基于串行接口,可提升控制信号的传输效率。依据PWM信号完成芯片的驱动,PWM的扩展通过单片机完成,并且通信的实现是基于串行接口,可提升控制信号的传输效率。
4结语
由于电力系统机房内设备数量较大、调度使用的相关服务器较多,导致机房管理、监控等相关工作量日益增多,人员作业已经无法满足全部管理和监控需求,智能化、自动化的机器人巡检成为主要方式。为保证机器人在该机房的巡检效果,本文设计用于控制机器人巡检的控制系统,保证机房区域的有效、可靠监测。经测试:该系统控制性能良好,可控制機器人准确完成巡检轨迹跟踪,具备精准的障碍识别以及测距功能,按照设定巡检路线以及巡检内容,精准完成区域巡检,并可监测区域内人员匹配情况,可用于完成防盗窃问题出现。除此之外,系统可精准控制机器人的巡检行驶速度,提升巡检效率,并且可实现机器人的自主巡检,实时保证机房的安全。
参考文献:
[1]王秋敏,李新华,王明瑞.配电室智能巡检机器人的设计与研制[J].机床与液压,2019,47(17):51-55.
[2]彭向阳,金亮,王柯,等.变电站机器人智能巡检系统设计及应用[J].中国电力,2018,51(02):82-89.
[3]王吉岱,徐东晓,孙爱芹,等.基于多传感器信息融合的输电线路巡检机器人自主越障方法研究[J].机床与液压,2020,48(09):24-28.
