模块化蛇形机器人连接结构的技术综述
2021-09-10潘玉芬
潘玉芬


摘要:模块化蛇形机器人,可根据不同需求进行组装,可靠性高,维护性好,在很多领域具有十分广泛的应用前景。本文通过对模块化蛇形机器人的连接结构在国内外专利申请趋势分析,了解该技术总体所处的技术发展阶段;分析了其申请国别情况,明确技术的地域分布情况;分析了模块化蛇形机器人连接结构的技术领域和技术构成,为高效检索获得相关技术提供参考;并对模块化蛇形机器人连接结构的主要技术进行了技术发展梳理,围绕运动灵活和结构紧凑的技术问题进行了功效分析,明确了在模块化蛇形机器人连接结构的研究热点和技术空白点。
关键词:模块化;连接;蛇形;机器人;专利技术
一、前言
生物蛇可以在多样化的自然环境中生存,可以控制自身实现多种姿态,轻松进入狭小空间。在仿生机器人领域,蛇形仿生机器人正是模仿生物蛇的超强适应能力应运而生的,其冗余度极高,具有多自由度的运动能力,使其可以模仿出生物蛇的运动模式,在运动行进过程中身体与地面多点甚至线或面接触,运动稳定性好,对地形的适应能力强。模块化蛇形机器人,可根据不同需求进行组装,可靠性高,维护性好,在很多领域具有十分广泛的应用前景。
蛇形机器人主要可以从以下几个方面进行研究:生物蛇在自然界中的运动分析、蛇形机器人的机械结构设计、蛇形机器人的运动步态研究、蛇形机器人的控制方法、蛇形机器人的环境辨识与运动规划。其中,蛇形机器人的机械结构设计需要综合考虑蛇形机器人的运动形态、控制方式、供电方式、通讯方式等各方面因素,因此是蛇形机器人研究的重点和难点。基于生物蛇“球铰”关节结构的启发,采用模块化设计方法设计的蛇形机器人简化了设计过程,组装形式多样,便于维护。模块化设计方法为新型蛇形机器人的设计提供了方向。
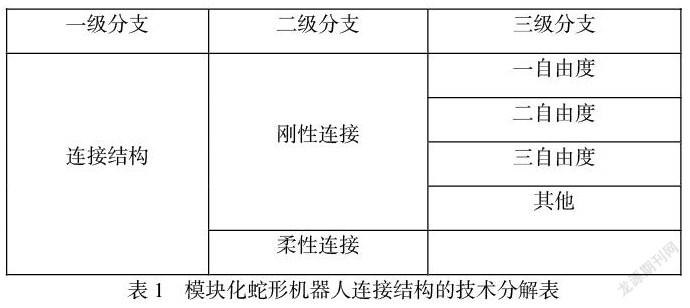
本文重点从蛇形机器人的机械结构设计出发,对蛇形机器人的连接结构(关节形式)进行专利技术梳理,根据模块化蛇形机器人的机械结构特点对其进行技术细分,如下表所示。同时,将结构紧凑和运动灵活作为效果标引项,对所有的数据进行了标引和处理。为国内蛇形机器人的专利技术研发提供助力。
二、专利申请态势分析
为了研究国内外模块化蛇形机器人领域专利申请的现状,本文选择CNABS和DWPI数据库,检索文献涵盖了公开日或公告日在2017年10月1日之前的全球发明和实用新型专利申请。选用的关键词为:蛇、机器人,对应的英文关键词为:robot、snake。IPC分类号为:B25J+、A61B1+。
基于检索到的专利文献进行数据提取、筛选以及归纳,重点从专利申请量年度分布、专利申请的地域分布两个角度对检索结果进行分析。
(一)专利申请年度分布
全球范围内,1983年出现第一件关于模块化蛇形机器人的专利。但在1983年至1997年之间,仅仅23件,整体处于萌芽阶段,直到2001年开始,才进入平稳发展阶段,并于2014年申请量达到顶峰。另外,自2002年以后,中国才有关于模块化蛇形机器人方面的专利,但申请量增长较快,且在全部专利申请量中的比例逐年增大。
连接结构的申请量与全球申请量的申请趋势基本一致,一自由度最早于1983年出现,2001-2011年经历了一个快速发展的时期,同样于2014年达到顶峰;二自由度最于出现于1994年,发展相对缓慢,申请量一直较少,2013-2016年才开始有的提升,但每年申请量仍不超过15件;而三自由度与柔性连接的申请还处于萌芽阶段,申请量总量不多。
(二)专利申请国家和地区分布
虽然中国起步较晚,但中国的专利申请量在该领域具有领先优势,居全球第一,约占总份额的1/2,可见中国对模块化蛇形机器人方面的相关技术研究非常重视,这与中国近几年在机器人方面的大力投入密切相关。其次是日本,申请量为99篇,约占总份额的26%。占居第三位的是美国,约占总份额的12%。欧洲专利申请约占总份额的5%,WO专利申请约占总份额的5%,其他国家和地区约占5%。
连接结构的申请量与全球申请量的分布基本一致,一自由度、二自由度、三自由度与柔性的最大申请量均为中国,分别为43%、68%、55%、42%,其次为日本31%、17%、20%、24%;中国的起步较晚,一自由度结构简单、连接技术已经相对成熟,在一自由度的投入比较少;二自由度技术出现较晚,结构上相对一自由度更为复杂、连接方式的多样化使得研究空间较大,中国对其的投入也相对比较多。三自由度与柔性结构最为复杂,研究成本的提高使得各国对研究的投入有所保留。
三、专利技术分析
(一)专利技术构成
图3.1为模块化蛇形机器人模块间连接形式的技术构成。模块间的连接分为刚性连接和柔性连接两大类,其中刚性连接323篇,约占总量的87%。刚性连接中一自由度连接的占据了53%,二自由度、三自由度分别占据了18%、5%,自由度数量越多,在一定程度上提升了制造以及装配的难度,故将模块间连接的自由度数设置为二/三的专利数量较少,大多数还是设置为一自由度连接。另外,其他连接方式,主要包括两模块之间固定连接,而整体模块化蛇形机器人的灵活运动单独由本体完成。
(二)专利技术发展路线
对模块化蛇形机器人的主要结构进行技术发展路线的梳理,对于研发人员来说,能够准确定位自身技术所处的位置,为研发立项、技术进入等提供参照,对于审查员来说,能够对发明申请进行准确的技术定位,为快速检索、创造性评判提供支持。本文主要针对连接结构和模块本体的主要技术的发展路线进行了梳理。
在模块化机器人的连接结构,一自由度刚性连接和二自由度刚性连接的技术占比最大,因此,对上述两种技术发展路线进行梳理,并根据一自由度刚性连接和二自由度刚性连接的结构形式,结合结构紧凑和运动灵活的技術效果,制成了模块化机器人的连接结构部分技术分支的技术发展路线图。
一自由度刚性连接,仅有一个驱动源,容易控制,是最为简单的连接方式,同时由于蛇形运动的特性,通常采用一个旋转自由度,如早期的文献公开号为JPS62148176A的申请公开了一种通过蛇形模块实现远程操作摄像装置,两个模块间采用一根旋转轴进行连接,相邻两旋转轴线相互平行,该连接使得机构整体能够在二维平面上灵活运动,但是该连接的运动模式较少,应用范围有限,后期为适应三维平面运动,对一自由度连接进行改进,如公开号为JP2009107074A的申请公开了一种具有蛇形模块的机械手装置,两个模块间同样采用一根旋转轴进行连接,但相邻两旋转轴线相互垂直,该连接使得机构整体具有三维运动,其应用范围大大增加。
在上述的两种连接的基础上,为使蛇形模块能够爬行如电线杆或内部管道之类,人们再次提出的新的一自由度连接方式,如公开号为WO2009009673A2的申请公开了模块化机器人,两个模块间同样采用一根旋转轴进行连接,但相邻两旋转轴线不垂直也不平行,其投影到同一平面上具有小于90度的夹角,该连接使得机构整体的三维旋转角度多样化,灵活性更强,不但能适应不同的的地面,还能蜿蜒爬行管道和圆柱杆。
二自由度刚性连接,能够将两个自由度复合到一起,大大减少了模块化蛇形机器人的长度,整体机构更为紧凑,由于蛇形运动的特性,通常采用两个旋转自由度,如早期的文献公开号为JPH0929671A的申请公开了一种模块化蛇形机器人关节两个模块间采用十字旋转轴进行连接,将两个垂直的旋转自由度复合到一起,但仍分别对其进行驱动,该连接使得原本的五节模块缩短为三节,机构整体小巧紧凑,但是该连接因两旋转轴线共面导致模块的旋转角度受限,为扩大旋转角度以进一步应用范围,对该连接进行了两种改进:一种是如公开号为CN1931653A的申请公开了一种适用于煤矿矿井搜索探测的履带式多关节铰接机器人,将共面的两个旋转轴线设置到两个平行的平面上;另一种是如公开号为JP2008023076A申请公开了一种偏心位置的多关节机器人,将共面的两个旋转轴线设置到两个相关的平面上,该交点位于连接处之外。两种方式均是通过降低两相邻模块的干涉范围而提高旋转范围。
在上述的工作的基础上,为提高驱动力矩,通过传动方式的变化,将单独控制的两个驱动源复合到一起,使得模块化蛇形机器人的驱动力矩更大,运动更为灵活,如公开号为CN101695833A的申请公开了一种叶片轮式蛇形机器人,连接处通过两同轴安装的舵机联动驱动,两舵机同轴安装,当两舵机1驱动两个横向锥齿轮4-1向同一方向旋转时,带动前一个机身3转动,也可形象的称为抬头、低头;当两舵机1驱动两个横向锥齿轮4-1向相反方向旋转时,带动前一个机身3左、右摆动。另外,公开号为WO2013177561A1申请公开了一种模块化蛇形履带车,将二自由度的双头连接改为单头连接,同时将连接处设置在模块单元上,使得机构整体更为紧凑。
四 小结
随着应用领域的不断扩展,国内外模块化机器人的专利申请持续大幅增长,但国内外的研发主体均主要集中在高校和研究院所,只有日本有较多的公司开展相应的研发。需要强化国内高校和研究院所相关专利转化能力。
关于模块化蛇形机器人的模块间连接形式,随着自由度数的增加专利申请量成递减趋势,一自由度转动连接是目前主流技术,其结构和控制均较其他技术简单,且通过多个模块之间的一自由度布置方式来达到运动灵活的效果也属于模块化蛇形机器人的热点技术之一。
技术的不断进步,蛇形机器人的连接方式向多自由度方向发展将是趋势,也是专利技术、专利布局的突破口。运动的灵活性也是蛇形機器人领域的重点关注的技术问题。
