连续小推力非开普勒悬浮轨道研究综述
2021-09-03潘晓徐明
潘晓,徐明
1. 上海航天控制技术研究所,上海 201109 2. 上海市空间智能控制技术重点实验室,上海 201109 3. 北京航空航天大学 宇航学院,北京 100191
1 引言
现代航天学与火箭理论奠基人齐奥尔科夫斯基有一句名言:“地球是人类的摇篮,但是人类不会永远被限制在摇篮里”。自1957年苏联发射第1颗人造卫星以来,人类已经开展了近地、月球以及太阳系内各行星的探测任务,宇宙航行与探索是人类在其发展中合乎规划且不可阻挡的历史进程。随着深空探测任务日益复杂化,传统的化学推进方式将无法胜任某些任务,以连续小推力为代表的一些新型推进方式[1]应运而生。在新型推进系统提供的外部动力作用下,航天器会偏离自然轨迹,形成多种类型的非开普勒轨道(NKO)[2],具体包括连续推力轨道、多体问题轨道、太阳帆轨道以及绳系卫星轨道。上述轨道分类之间彼此也存在交叉,不是严格的并列关系。
本文所探讨的连续小推力悬浮轨道是非开普勒轨道中讨论较多的一种,其受力特征为除中心天体引力之外,还受到连续小推力作用;轨道特征是轨道平面不通过中心天体,而是悬浮在中心引力源的上空或下方。根据引力源的不同,悬浮轨道又可进一步分为日心悬浮轨道[3]、地心悬浮轨道[4]及其他行星悬浮轨道[5-7]。日心悬浮轨道,顾名思义位于太阳上方区域,凭借此特殊的空间位置,成为太阳物理研究、空间天气监测、深空通信中继等深空探测任务[8]的理想平台。地心悬浮轨道可实现航天器长期驻留地球极区上空,有效弥补太阳同步轨道在高纬度地区观测与通信导航任务中的不足,助力北极航运路线拓展,也利于探索极地蕴藏的油气资源。
2 连续小推力技术发展史
连续小推力是相对常规化学推进器所能产生的脉冲式推力而言,不同于脉冲机动对轨道的松散控制,连续小推力推进可以实施全过程、高精度的轨控。化学燃料推进与连续小推力推进方式的优缺点如表1所示。
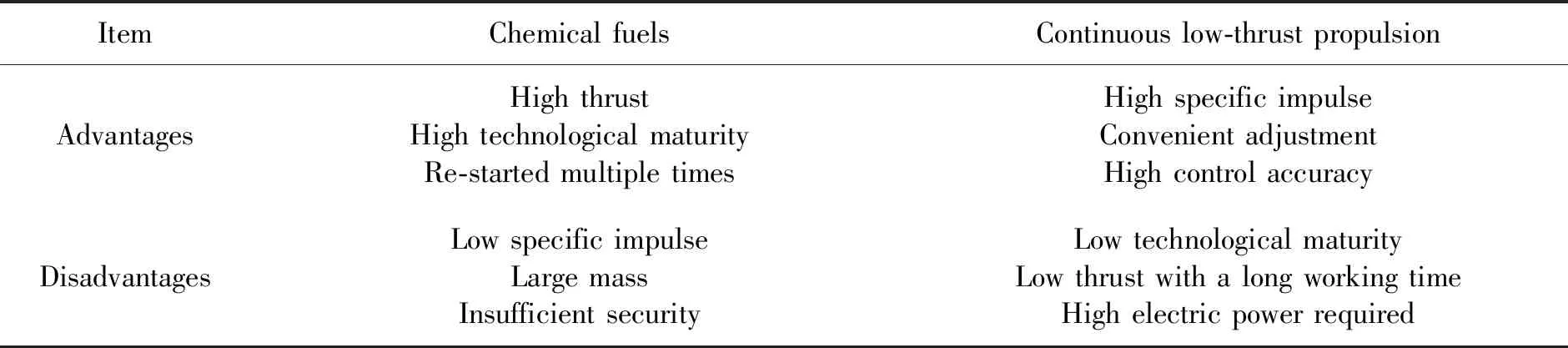
表1 不同推进方式的优缺点
根据工作原理的不同,连续小推力可以划分为4类:电推进、太阳帆推进、束能推进和微推进[9-10]。其中电推进[11]和太阳帆推进[8]是目前比较成熟和应用最多的连续小推力推进系统。
2.1 电推进技术
电推进器的工程研究始于20世纪50年代末[12]。1962年,静态等离子体推力器(SPT)[13]被发明,它属于霍尔推进器的一种,其中以SPT-70和SPT-100在卫星中的应用最为广泛。这种推力器由于结构简单、可靠性高以及比冲大的优点在航天器中大受欢迎,也成为迄今在空间用得最多的电推进器之一。
根据功率的不同,电推进可粗略的分为功率小于1kW的小功率电推进,广泛应用于军事和民用领域中的微小卫星[14-19];功率在1~10 kW的中等功率电推进,应用于地球静止轨道(GEO)卫星位置保持、高轨遥感卫星、高轨通信卫星任务以及中小型深空探测器主推进任务等,并逐步发展成为国际上主要GEO卫星平台的标准配置[11,20];以及功率大于10 kW的大功率电推进,可实现复杂空间操作,未来有望应用于国际空间站任务[21-24]。
电推进系统在航天任务中比较典型应用的有美国的“深空一号”探测航天器(Deep Space-1)[25]、“黎明”号(Dawn)[26],日本的“隼鸟号”(Hayabusa)小行星探测器[27],欧空局的“智能一号”月球探测器(Smart-1)[28]以及地球重力场和海洋环流探测卫星(GOCE)[29]。Deep Space-1于1998年发射,是电推进首次作为主推进系统在深空探测中的应用。Hayabusa于2003年5月9日发射,在两年多的飞行期间,一直使用氙离子发动机航行,接近小行星时该离子发动机已经累计工作了25 800 h,产生了1400m/s的速度增量。Dawn于2007年9月27日发射,配备了先进的等离子推进系统,旨在访问小行星带最大的两颗小行星:Vesta和Ceres。GOCE于2009年3月17日发射,启用了先进的氙离子推进器系统,是第一颗使用电离子推进器持续抵消大气阻力的卫星。电离子推进器系统由两个冗余的推进器单元组成,可以产生1~20 mN稳定的平滑推力。GOCE超灵敏重力测量的成功取决于对卫星轨道和速度的细微控制,常规喷气发动机不能抵偿在GOCE轨道高度由气压产生的微小阻力,但电离子推进器系统可以。
中国的电推进技术最早始于1967年,但随后由于各种原因,研究断断续续,直到2014年才开始有了重大进展[21]。目前中国中等功率霍尔电推进技术已处于成熟阶段,正式投入工程应用。其中,40 mN霍尔推力器已经通过空间飞行验证并在国际上首次完成2 500 h的地面1∶1长寿命试验验证[30];截至2016年7月,80 mN霍尔推力器地面1∶1长寿命试验已经超过8 000 h;为其配套的发射电流2.5 A的空心阴极,成功通过28 000 h/15 000次地面长寿命试验验证[30],已具备在轨可靠稳定运行15年以上的能力,达到国际先进水平;2016年12月,北京控制工程研究所研制的“磁聚焦霍尔电推进系统”完成了全部在轨飞行验证工作,这是世界上第一套完成在轨飞行验证的磁聚焦霍尔电推进系统。在大功率霍尔电推进技术研究方面,针对未来载人空间任务动力需求,上海空间推进研究所通过国际合作,完成了10 kW级大功率霍尔推力器的研制,测试推力达到511.5 mN,比冲2 625 s,效率为63.6%,并通过500 h有限寿命试验预估,预估寿命超过10 000 h[30]。2020年1月,中国第一款20 kW大功率霍尔推力器于成功完成点火试验,点火时间累计达8 h,点火次数超过30次,总计在轨点火时间长达50 h。在试验过程中,这款霍尔推力器点火可靠,运行平稳,工作参数稳定,实测推力1 N,比冲3 068 s,效率大于70%,性能指标达到国际先进水平,推力从小功率的“毫牛级”成功迈进了“牛级”时代。目前100 kW级的霍尔推力器也已经验证,霍尔推力器投入实用指日可待。
2.2 太阳帆推进技术
太阳帆是一种利用太阳光子与大面质比薄膜帆面的交互作用,反射光压产生推动力实现加速航行的新型航天器[31]。其优点包括质量小、收展比大、发射成本低、功耗低、无需燃料、能获得持续小推力和航程长等。虽然太阳光压力的量级较小,仅是毫牛量级,但连续的无能耗的光压加速使其非常适用于太阳极地探测、小行星探测、地磁暴预报、平动点探测、星际航行等航天任务。
20世纪20年代,苏联科学家Tsiolkovs首次提出太阳光照射帆面,可产生光压力以作为航天器的推动力[8]。可惜的是,他们提出的新概念没有引起重视。直到1958年,Garwin[32]发表了世界上首篇研究太阳帆的文献。1960年,NASA发射了“回声1号”(Echo-1)探测气球,首次对太阳光产生的光压力进行了测量[33]。之后美国和俄罗斯对太阳帆项目展开了研究,但或因太阳帆理论基础还显不足、太阳帆薄膜材料的性能不确定、研究项目资金缺乏等一系列外在因素计划搁浅,或因帆面展开试验失败而终止任务。直到2010年5月21日,日本宇宙航空研究开发机构(JAXA)成功发射了世界上第一个太阳帆航天器“IKAROS”号,首次完成了太阳帆的在轨展开、在轨光压加速航行以及加速飞掠金星任务[34]。图1为IKAROS号航天器在轨实物。帆面展开后规格约为14 m×14 m,厚度仅为7.5 μm,在轨获得了1.12 mN的光压力。IKAROS的成功极大地推动了太阳帆在深空探测领域的工程应用,也进一步掀起了太阳帆的研究热潮。同年11月19日由NASA研制的小型太阳帆“NanoSail-D2”[35]成功发射,并在随后的阶段顺利完成地球轨道任务。“NanoSail-D2”是一种很小的新型纳米帆,是一个3单位的立方星,展开面积不到10 m2,总质量大约为4 kg。类似地,“CubeSail”[36]也是一种纳米帆,展开面积约为25 m2,但是帆体的总质量却减小到3 kg,可以投放到轨道半径为700~800km的太阳同步轨道上。由欧盟出资资助的“DeorbitSail”[37]旨在演示验证使用低成本超轻太阳帆作为拖曳帆使卫星离轨再入大气层。在展开前被打包封装在体积为(11×11×34) cm3的立方体平台里,展开后通过三轴姿态控制。2015年7月10日,DeorbitSail顺利发射并成功入轨,但入轨后卫星发生故障,任务失败。2015年5月20日,由美国行星协会资助的“LightSail-1”[38]发射成功且太阳帆成功展开,但由于该轨道部署太低,导致LightSail-1无法正常航行,不能验证其太阳帆作用。2019年6月25日,美国行星协会又主导发射了“LightSail-2”[39],其轨道高度为距地720 km,大气阻力较小,帆面总面积为32 m2,质量为5 kg,加速度值可达到IKAROS的10倍左右。LightSail-2发射与展开过程顺利,首次成功演示了太阳驱动飞行,抬升轨道,LightSail-2开启了一个新的行星际航行模式。太阳帆无质损、无限比冲的本质特征使其成为深空探测领域,尤其是非开普勒轨道任务领域的研究焦点。
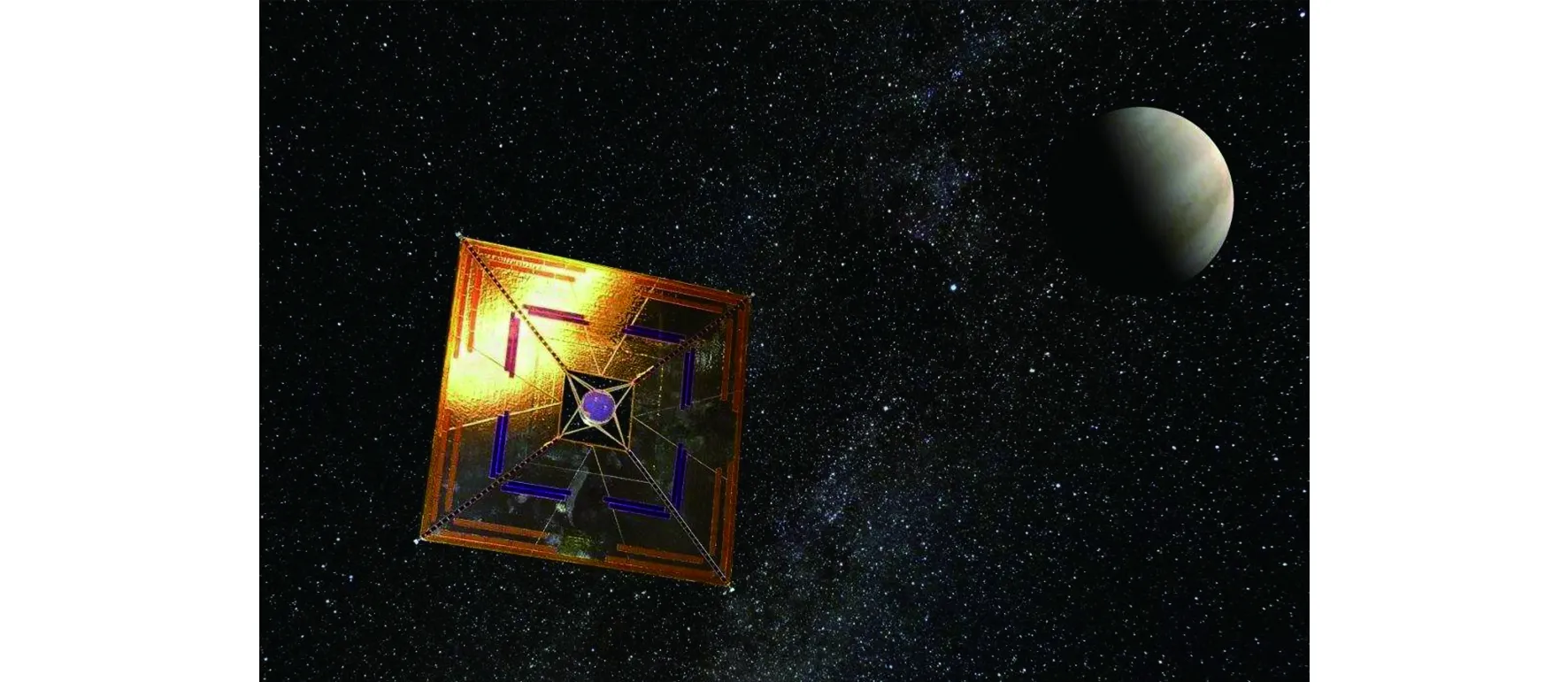
图1 太阳帆航天器IKAROS号Fig.1 Solar sail spacecraft “IKAROS”
除了太阳帆以外,2004年,芬兰研究员Janhunen提出了另一种具有无限比冲的推进方式——电动太阳风帆(E-sail)[40]推进,通过利用与太阳风中高速运动的带电粒子动量交换产生推力,从而推动航天飞行器完成空间飞行任务。不同于太阳帆,E-sail在结构上并不存在真正的“帆”结构,只是由处于同一平面的带电金属细链形成概念上的帆面,如图2所示,而金属细链的在轨展开比起超大面积柔性结构则要易于实现得多。另外,目前万平米级的高性能太阳帆在距太阳1AU处所能产生的光压力仅在0.1N量级,而E-sail则能产生接近1N的连续推力,进一步拓展了非开普勒轨道的任务类型。自概念提出以来,多位研究学者对其可能的任务应用进行了深入的探讨,包括日心悬浮轨道,太阳系外探测、近地小行星采样返回、人造拉格朗日点、引力拖车任务等[41-46]。以上研究说明了E-sail作为一种新兴推进形式具有良好的应用前景。
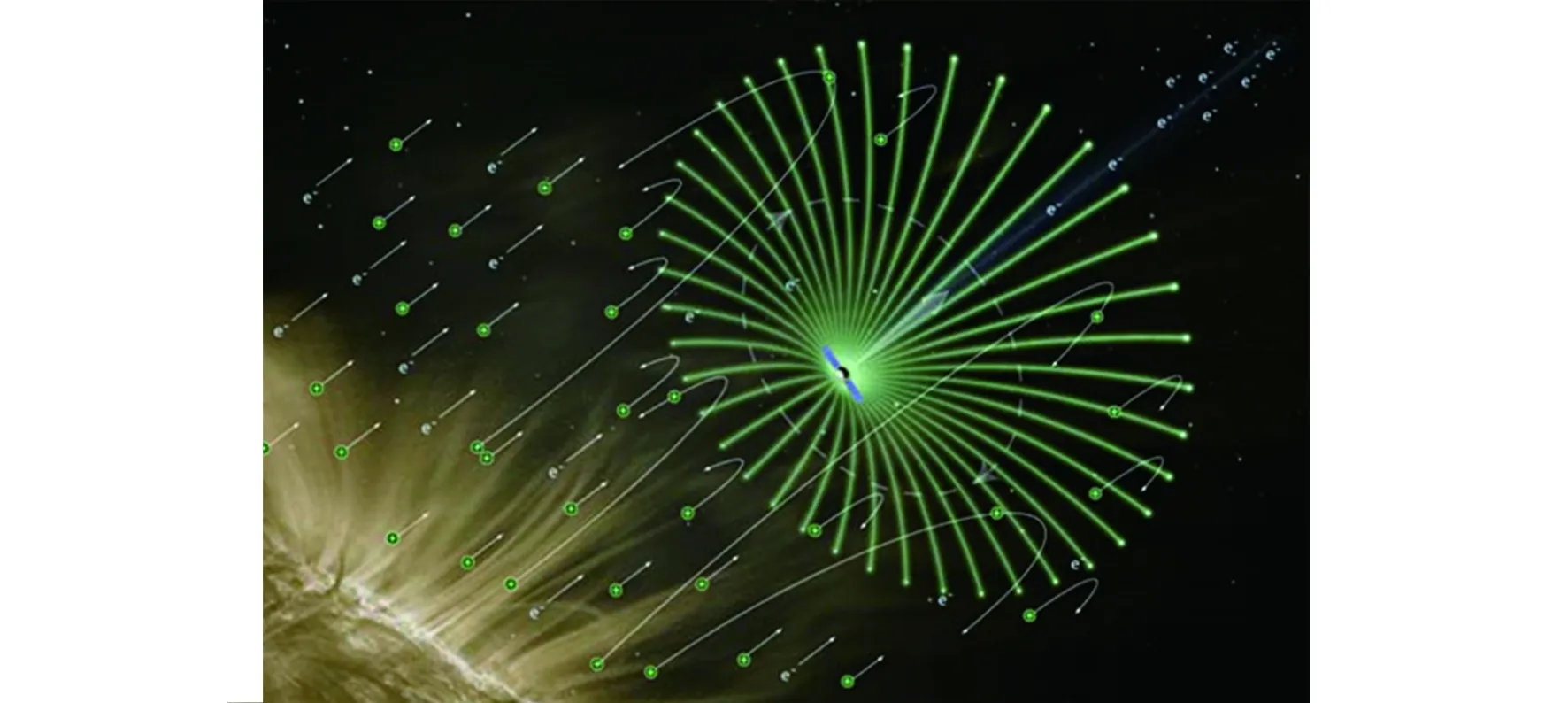
图2 电动太阳风帆概念Fig.2 The concept of electric solar wind sail
3 悬浮轨道动力学与控制
最早在20世纪60年代,Dusek[47]提出了利用推进力平衡引力可实现航天器的悬浮,生成轨道面不包含中心天体的周期轨道,这就是最早时期的悬浮轨道概念。20世纪70年代末,NASA开展了利用太阳帆实现与哈雷彗星交会的任务研究[48],太阳帆迅速进入航天界的视野。1984年,Forward[49]提出太阳帆在太阳光辐射压力的作用下可悬浮于黄道平面的上方或下方,围绕太阳作周期运动,该轨道被称之为日心悬浮轨道。之后,Forward提出了“Statite”[50]这一新概念航天器,该航天器的运动轨道并不是一种常规的弹道轨道,它靠近地球却不占用拥挤的地球静止轨道空间,并通过平衡太阳光压力和地球引力的作用,可长期观测地球的南北两极区域。对Statite的研究也逐渐引起了学者们对地心悬浮轨道的重视。
悬浮轨道作为一种典型的非开普勒轨道,主要是在二体和三体模型下得到的结论。二体模型中存在中心天体,且航天器除受中心天体的引力外,还受到其他的作用力。如研究地心悬浮轨道时,中心天体为地球,对电推进航天器只考虑地球的引力与连续电推力;对于太阳帆航天器,太阳的引力提供太阳帆绕太阳旋转所需的向心力,在特定旋转坐标系下,只考虑地球引力与太阳光压力。在某些特殊情况下,航天器在太阳和地球的引力场中运动,太阳和地球的引力相当,而由于航天器质量远小于太阳或地球质量,所以仅忽略航天器对太阳和地球的影响,这种问题称为限制性三体问题。在太阳-地球-普通航天器组成的限制性三体问题当中,存在5个平衡点,称为经典拉格朗日点;而当航天器为太阳帆时,太阳帆能够在经典拉格朗日点以外的点平衡,该平衡点称为人工拉格朗日点。由于太阳帆的特殊性,大大拓展了平动点的存在范围。在经典以及人工拉格朗日点附近的轨道可统称为平动点轨道[51],其中后者与二体模型下悬浮轨道的受力特征与轨道特征相似,因此人工平动点轨道也在本文的讨论范畴之内。
3.1 日心悬浮轨道
英国工程院院士McInnes教授在日心悬浮轨道的动力学与控制方面做了大量的理论研究。他在文献[3]中建立了太阳帆日心悬浮轨道动力学方程,指出了日心圆形周期悬浮轨道本质上是轨道动力学方程的平衡点,且可由轨道半径、悬浮高度和轨道角速度3个参数描述,继而可计算出维持该轨道所需的推力加速度大小和方向。文献[52-53]依据轨道角速度的不同,首次定义了3种特殊的日心悬浮轨道,并分析了不同类型轨道的存在性、稳定性及可控性。具体来说,第一类特殊悬浮轨道的角速度等于同地心距的开普勒轨道角速度;第二类轨道角速度等于地球绕太阳公转的角速度,这类轨道又被称为地球同步悬浮轨道,应用最为广泛;第三类轨道为最优悬浮轨道,在给定悬浮轨道半径和悬浮高度的情况下,通过选择角速度,使得太阳帆的光压因子最小。受太阳光压力方向限制,太阳帆生成任一条悬浮轨道都应满足太阳光压力方向与太阳光夹角小于90°。除了连续推力外,文献[54]还提出了多脉冲推进下的开普勒弧序列构成的悬浮轨道,以35km的悬浮高度为例,10脉冲推进维持地球悬浮静止轨道比连续推力维持消耗的燃料更多。McInnes教授还研究了非开普勒悬浮轨道与开普勒轨道的拼接方法;探讨了悬浮轨道在空间天气监测、月球远端通信和太阳物理观测中的应用[55]等。Bookless等[56]研究了具有常值加速度的太阳帆悬浮轨道动力学问题,他在二体、三体系统轨道动力学模型下分析太阳辐射加速度对动力系统的影响,发现太阳帆推进模式下系统存在人工拉格朗日平衡点,且适当的轨道控制可以产生周期性悬浮轨道族。McKay等[57]针对一种特殊的非开普勒悬浮轨道发表了非常完整和详尽的综述,该轨道的特征为航天器所受的推力加速度大小与重力加速度大小近似相等,在中继通信、地球监测以及行星科学探索任务中有广泛的应用。Niccolai等[58]讨论了E-sail日心悬浮轨道的保持策略,用以探测太阳极地活动。
国内以清华大学李俊峰教授与宝音贺西教授为代表的许多高校学者也对日心悬浮轨道进行了大量基础性的研究,完成了不同任务下的悬浮轨道的动力学分析与设计。李俊峰[2]讨论了非开普勒轨道与传统开普勒轨道的异同点,并通过分析非开普勒轨道的特点,从设计的角度出发,给出了非开普勒轨道的定义。宝音贺西[59]研究了在日地系统圆型限制性三体问题上新类型的太阳帆轨道。他指出这种类型的轨道是一种周期性轨道,和人工拉格朗日点有关系,并可以悬浮在黄道面之上,但是这种悬浮轨道稳定性极差,需要进行适当的姿态控制。紧接着,龚胜平[60-64]对太阳帆悬浮轨道的编队以及控制问题展开了一系列研究。中科院空间科学与应用研究中心钱航[65-66]等主要研究了日心悬浮轨道的保持和稳定控制等问题,他采用特殊形式的系统动力学方程,结合最优控制方法对太阳帆日心悬浮轨道进行主动控制与仿真计算。国内对于E-sail的研究起步较晚,目前主要在研的团队包括哈尔滨工业大学齐乃明教授团队、西北工业大学袁建平教授团队以及北京控制工程研究所。文献[67]在Janhunen等[68]研究工作的基础上,建立了E-sail姿轨耦合动力学模型,研究了E-sail日心悬浮轨道保持任务中所涉及到的轨迹优化问题和大角度机动姿态跟踪控制问题。
此外,上述关于非开普勒悬浮轨道的研究都致力于动力学分析和轨道设计,未关注非开普勒轨道族研究中的另一个关键问题:从NKO动力学参数到相应轨道要素之间的解析推导,而其实后者对于支持未来的航天任务探索和轨道理论发展具有非常重要的意义。悬浮轨道受小推力作用悬浮于地球上方,针对于开普勒轨道的经典摄动理论[69]不再适用,这使得非开普勒轨道的动力学特性研究、控制与实际应用大多局限于数值分析,无法解析推演出航天器运动轨道的变化规律。解决该问题的思路之一是类比Kepler轨道,推导悬浮轨道的密切根数(OKE)解析解。Peloni等[70]在强非开普勒轨道和经典轨道元素之间建立了闭合的解析映射关系,但是他们研究的轨道局限于圆形周期悬浮轨道,即轨道半径和高度都保持恒定。之后潘晓等[71]通过建立“虚拟地球”模型,利用卫星摄动理论[69],解析推导了一般(周期和拟周期)非开普勒悬浮轨道的密切根数,与数值积分结果的对比表明该解析推导精度良好。悬浮轨道解析解除了应用于任务设计初步阶段的快速计算,更重要的意义是提供了一种类似于轨道根数的语言来直观描述非开普勒悬浮轨道的全局演化规律。
值得注意得是,文献[72]表明,大多数日心悬浮轨道都是不稳定的,在摄动力或初始扰动下,悬浮高度与轨道半径均会随时间衰减,因此必须对日心悬浮轨道任务采取有效的轨道保持策略。在轨道保持方面,将系统非线性动力学方程在标称轨道附近线性化后再进行分析研究是目前设计悬浮轨道保持控制器的常用思路。McInnes[73]基于标称轨道附近的线性化动力学方程提出了轨道保持被动控制策略,指出在太阳帆帆面法线方向和太阳光夹角保持不变时悬浮轨道稳定。Bookless等[74]提出了围绕拉格朗日点的拟周期轨道的状态控制方法,他发现调节帆面面积,改变太阳帆螺旋角和偏航角可以起到稳定轨道的作用。钱航等[65-66]针对太阳帆日心悬浮轨道线性动力学模型,采用线性二次型调节器方法设计了相应的轨道保持控制律。Waters等[75-76]基于最优控制理论构造出太阳帆平动点及其附近Halo和Lyapunov轨道的维持策略,并分别给出各自的控制器收敛域;同时,Waters基于所构造的控制器实现了不同族周期轨道以及平动点之间的同异宿转移。霍明英等[77]采用线性二次型最优控制对E-sail日心悬浮轨道稳定保持进行主动稳定控制,结果表明只需很小的力矩就能实现E-sail姿轨耦合系统的稳定。徐明等[78]注意到非共线型平动点的1维稳定流形、1维不稳定流形和2维中心流形可用于构造保Hamiltonian结构控制器(HSP),不仅改变平衡点的拓扑性质,还可在非共线平动点附近生成新型稳定的拟周期轨道族。潘晓等[79]建立了仅使用Coriolis加速度和速度反馈的弱HSP控制器,系统的拓扑性质、Hill区域和平衡点均保持不变。通过改变Coriolis加速度因子即可有效改变部分轨道的走向,避免触发不稳定条件。
3.2 行星悬浮轨道
McInnes和Simmons[4]将日心悬浮轨道族扩展至行星悬浮轨道。该轨道族要求太阳行星连线垂直于太阳帆的轨道平面,同样,新的闭合轨道族以轨道半径高度和周期为参数。如果太阳帆的指向和太阳光线均固定,绕行星中心的太阳帆轨道问题可以简化为Stark问题[80]。与日心悬浮轨道类似,文献[4]也定义了两种特殊的太阳帆行星悬浮轨道:地球同步悬浮轨道与最优悬浮轨道。Bookless[81]在文献[4,52]的动力学基础上,研究了平衡点附近运动的稳定性与控制策略。根据线性动力系统的特征值,将平衡点分为稳定的椭圆型平衡点(中心)与不稳定的双曲型平衡点(鞍点)。Bookless定义了平衡点附近轨道的可行域,发现了椭圆平衡点附近的稳定轨道与双曲平衡点附近的不稳定轨道,后者可到达无穷远处,可应用于星际转移任务。之后,徐明[82]进一步对该模型进行了深入的分析和总结:利用Birkhoff正则形式,研究了非共振情况下平衡点附近的运动;给出了判断太阳帆行星悬浮轨道稳定的充分必要条件及该判据的二阶近似形式;证明了临界破裂的KAM环被Lyapunov轨道的(1,1)-同宿轨道充满,且该同宿轨道由Lyapunov轨道的稳定和不稳定流形构成。由于太阳帆悬浮轨道受太阳光压力方向限制,上述文献中的动力学模型都是考虑常值推力且推力方向恒定(太阳帆法向与太阳光方向平行)。基于此限制,潘晓等[83]考虑连续电推力驱动下的行星悬浮轨道,在动力学模型中引入推力俯仰角,集中研究推力方向对悬浮轨道非线性动力学特性的影响机理,并提出了基于推力俯仰角控制的悬浮轨道拼接与镇定策略。
在行星悬浮轨道中,还有一种特殊的轨道,称为极地探测轨道(pole-sitter orbit)。通过将航天器始终布置在极轴上空并与极地保持相对静止,凭借单星即可实现对极区不间断、实时观测,既提高了航天器的时间分辨率,也降低了地面站的跟踪难度,如图3所示。“极地探测器”(pole-sitter)的概念最早诞生于1980年[84],Driver首次提出使用电推进(SEP)生成Pole-sitter轨道,并计算了恒定悬浮高度下所需的推力加速度。当悬浮高度为2.5×106km时,维持极地观测所需的推力加速度最小,若高度继续下降,推力加速度会急剧增加,无法实现。即使SEP比冲高,极地观测任务的长期性也对星上电推进系统的质量提出了很高的要求,仅使用SEP很难实现观测任务。之后1991年,Forward[50]基于太阳帆人工平衡点[85]启发,提出将太阳帆悬浮于圆型限制性三体问题的经典拉格朗日点之上(或之下),应用于极地通信的设想。对纯太阳帆推进航天器而言,太阳光压力取之不竭,任务周期理论上可以无限长;但是人工平衡点是不稳定的,在长周期任务中,仍要采用镇定策略稳定轨道。于是Waters等[86]在“statite”(static satellite)概念基础上,做了一些拓展工作。他们没有选择人工拉格朗日点,而是在L1点上方人工拉格朗日点附近的周期轨道族中,选择运动角速度与地球同步的周期轨道作为观测位置。虽然考虑到现实可行的太阳帆面质比,Waters和McInnes提出的方案对极地的覆盖率不佳,但相对于Forward所提出的静态观测情况,在相同的面质比下,观测性能有很大提升。

图3 不同坐标系下的极地探测轨道概念[94]Fig.3 Pole-sitter concept in different frames[94]
上述研究揭示了纯太阳帆推进航天器在极地观测任务中的局限性:一是实际工程生产中太阳帆面积有限,导致面质比不大;二是当太阳帆靠近地球极地远离太阳时,太阳帆推力加速度很小,不足以支撑任务。为解决上述问题,2008年Baig等[87]又在“statite”概念中引入融合太阳光压推进(SRP)与电动推进的混合型航天器,SEP与SRP推进互补,既可一定程度上降低悬浮高度,也可减少电能消耗,缓解航天器质量压力,延长任务寿命。之后以Ceriotti和Heiligers为代表的年轻学者深入探讨了混合推进航天器实现极地观测任务的方法思路[88-95]。Ceriotti等[88-90]在圆型限制性三体问题下研究混合推进航天器地球最优极地轨道,通过优化方法可调整太阳光压辐射加速度以减少轨道维持所需的电推进燃料消耗。需要说明的是,仅仅依靠太阳帆光压推进是无法实现Pole-sitter轨道的,必然要消耗电推进燃料。此外,Ceriotti还仿真了航天器从地球转移至极轴上空、南北极轴上空区域转换以及极地监测轨道的保持控制[94]。Heiligers[93]同样使用混合推进器设计了赤道平面内与平面外的地心悬浮轨道,该轨道角速度与GEO相同,航天器对地保持静止。结果表明悬浮于赤道平面上空/下方的地球同步悬浮轨道,相较于赤道平面内轨道,所需的推力加速度更小。
3.3 人工拉格朗日点
圆型限制性三体问题(CR3BP)中只有5个固定的平动点,然而引入太阳帆或者电推进等连续小推力可以得到一系列人工平动点。人工平动点的存在大大扩展了CR3BP中的平动点轨道资源,可以使任务设计更加灵活,选择更为广泛。McInnes在文献[85]中首次提出了太阳帆人工拉格朗日点的概念,完整给出了太阳帆人工平衡点的存在区域与维持平衡所需的太阳帆性能参数,并分析了人工平衡点的线性稳定性。根据文献[85]中的人工平衡点的定义、约束以及太阳帆面质比的计算公式,图4给出了太阳帆-日地三体系统人工平衡点处光压因子分布。文献[96]还将上述研究拓展到非理想太阳帆的情况,结果表明人工平衡点的可行域对太阳帆的反射率很敏感。Baig等[87]研究了混合推进航天器在CR3BP引力模型中生成的人工平衡点,使用电推与光压混合推进的模式既可突破太阳帆平衡区域的局限性,也可最大限度减少新增平衡区域的电推消耗。Aliasi等[97]在椭圆型限制性三体模型下,在太阳帆中引入电致变色材料板,通过仅改变太阳帆面质比,从而实现人工L1点的镇定。类似的问题,Niccolai等[98]利用E-sail航天器维持太阳-地月系CR3BP中L1型人工拉格朗日点的稳定,通过调节E-sail的电网电压来提供反馈控制。Ishimura等[99]考虑通过绳索连接锚与太阳帆,以给太阳帆增加配重。结构更改后的航天器其人工平衡点位置由锚重和绳长决定,在不改变太阳帆姿态与面质比的情况下,新平衡点较原人工平衡点远离太阳,更靠近L2点。除了往新型航天器方向拓展,近年来针对人工平衡点的研究也逐渐延伸到小行星上。文献[100]利用连续推力补偿,求解了不规则小行星附近的人工平衡点,以扩大小行星上空悬停飞行任务的可行区域。
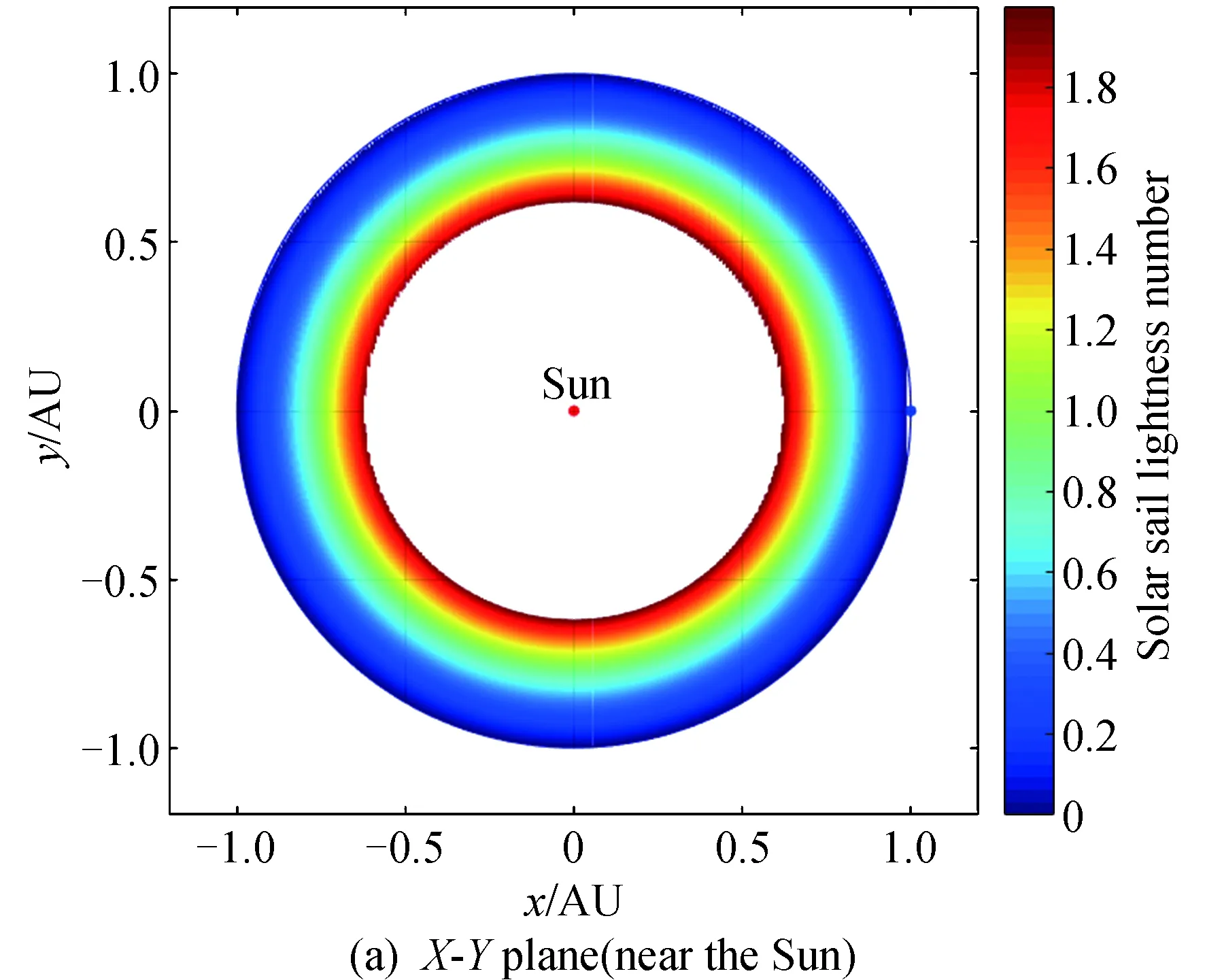
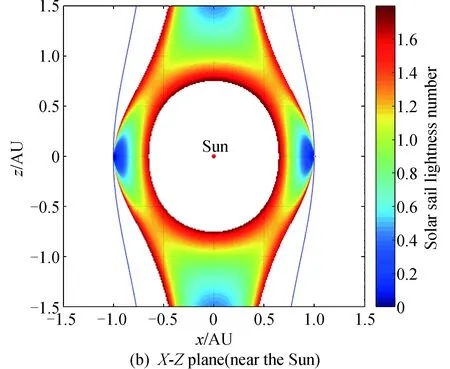
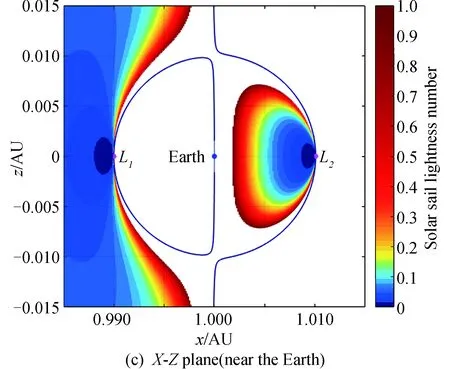
图4 太阳帆-日地三体系统人工平衡点处光压因子分布Fig.4 The lightness number required by artificial Lagrangian points in solar sail-CR3BP
在人工拉格朗日点附近也存在着周期轨道[101],其求解方法与halo轨道类似。Baoyin在文献[102]中研究了椭圆限制性三体模型下的人工平衡点,证明了在归一化长度随时间变化的旋转坐标系中,存在平面人工拉格朗日点。应用摄动法,他还得到了日地连线上人工平衡点附近太阳帆halo轨道的三阶解析近似解[103]。Waters在文献[86]中进一步拓展,研究了任意人工平衡点附近的周期轨道近似解。Simo等[104]探究了太阳帆在地-月限制性三体模型中共线平衡点附近的周期轨道的近似求解方法,该轨道可确保月球背面和地球赤道地区的可视性,并能以新的方式实现月球通信。姚闯等[105]考虑了太阳帆的光学退化与变形,利用HSP控制器,生成非理想太阳帆在人工平衡点附近的有界拟周期轨道。
学者针对人工拉格朗日点以及其附近的有界轨道的潜在应用做了大量的研究。经典的拉格朗日点L1点与地球的距离约为0.01 AU,在该位置上,卫星能提前1 h进行地磁暴预报。为了获得更早的预报时间,可将航天器置于离地球更远的点进行观测。NASA提出将太阳帆置于距离太阳0.974 AU处平衡,该方案的预报时间相比于经典L1处卫星,提前量增加了3倍。此外,人工平衡点由于其出黄道面的优势,在导航方面也有着重要的应用。文献[106]提出基于人工拉格朗日点太阳帆的导航卫星自主定轨方案,并进行了实验仿真。太阳帆提供的实时位置信息能使导航卫星的定轨精度得到提高,但文献[106]并未设计太阳帆星座构型,且太阳帆是受被动控制稳定在人工拉格朗日点处,其所需的面质比变化范围比稳定在人工平衡点附近的情况更大。文献[107-108]利用太阳帆CR3BP系统中的人工拉格朗日点部署服务于地月空间的立体导航星座。由于该任务中月球摄动不可忽略,太阳帆无法在人工拉格朗日点处保持自然静止状态。通过构造HSP控制器,可在人工平衡点附近生成有界拟周期轨道,代替人工平衡点作为星座选址,可有效降低保持太阳帆星座构型所需的控制力。文献[109]概述性地讨论了利用人工拉格朗日轨道在极地气象学、环境遥感、通信和空间气象应用的可能性。
4 悬浮轨道编队飞行
航天器编队飞行[110-111]通过利用多个航天器星间通信、分布式协同工作,可拓展单个航天器无法实现的功能,形成一个功能齐全、规模较大的航天器系统。并且由于多平台的冗余设计,可通过对故障模块的补发以及编队构型的重新设计,避免任务失败,具备可维护性和高可靠性。目前随着非开普勒轨道的发展,以及对南北极开发和深空探测的需要,悬浮编队飞行具有重要的研究和应用价值。另外,小推力悬浮轨道编队问题与自然构型下的编队,其动力学模型有诸多相似之处,因此许多针对自然构形编队的研究方法都可以借鉴,用于探索小推力相对轨道。
在相对运动的描述上,航天器编队飞行的本质是相对运动控制问题,因此相对运动特性分析是构型设计与控制的前提。目前编队飞行的运动描述方法可以分为两大类:一是动力学方法,即以位置、速度作为描述变量,典型的有著名的CW(或HCW)方程和TH方程[112];二是运动学方法,即以轨道根数作为描述变量[113],刻画航天器相对运动状态。龚胜平在文献[60]中第一次提出了太阳帆编队的概念,旨在利用多个小而轻型太阳帆实现大太阳帆的功能,缓解太阳帆技术与任务需求之间的矛盾。他利用轨道动力学理论,研究了日心悬浮轨道[60]、行星悬浮轨道[114],以及人工拉格朗日点[115]附近太阳帆编队相对运动的稳定性和控制问题。与传统编队的研究方法类似,通过将相对运动在主星悬浮轨道附近线性化,利用特征值分解等方法,分析相对运动的线性稳定性。针对不稳定运动,基于线性二次型和输入反馈线性化等方法,建立控制器,实现任意参考相对轨道的跟踪。特别地,太阳帆航天器维持悬浮编队所需的控制力,可通过调整帆面姿态和面质比来提供,不需要额外的燃料消耗。Biggs和McInnes[116]考虑了太阳帆椭圆形三体限制问题中的编队,并确定了一个为期一年的周期性轨道族,通过数值连续方法,每个轨道都对应于唯一的太阳帆方向。但是,他们没有解决悬浮轨道的相对动力学问题。潘晓等[117]研究了电推力悬浮轨道的线性相对运动问题,重点关注了地球同步悬浮轨道编队,探究了线性相对运动的稳定性、解析解与控制策略,并阐述了悬浮轨道编队在地球表面成像和中继通信等对地静止轨道任务中的应用。利用运动学方法,文献[62]进一步提出了相对轨道根数的概念,并提出了基于相对轨道根数的相对轨道设计方法。王伟等类比开普勒轨道,定义了非开普勒轨道的轨道根数,通过悬浮轨道根数对悬浮编队做了大量的研究[118-120],研究了日心圆形悬浮轨道之间的相对运动并获得了相对距离范围的半解析近似结果。之后,他们还将理论和方法推广到文献[119]中的椭圆轨道,并在文献[120]中进一步消除了经典轨道元素的奇异性以避免原方法失效。
由于相对运动难以直接求解,以上大多数研究都是建立在线性动力学模型上或是获得了近似解。即使这些相对运动是解析性的,但由于动力学的近似,其模型存在对航天器轨道动力学模型精确性过度依赖的问题,无法在长距离和长期任务中保持编队构型。这在对J2不变相对轨道[121]的研究中,也有相同的问题。为了确保精度问题,众多学者纷纷寻求数值的方法来研究非线性编队飞行。Koon等[122]采用Poincaré截面和Routhian变换等技巧分析编队相对动力学,给出一种J2不变轨道的构造思路:将编队主从星分别放置于Poincaré截面的不动点及其闭轨,可以将相对构型保持在较长时间内。不过,由Poincaré截面得到的伪圆和伪椭圆轨道具有不同的交点周期和升交点漂移率,因此仅在Poincaré截面上选取编队的初始条件并不能保证编队构型的长期稳定。为了克服该方法的缺陷,徐明等[123-125]在该方法的基础上,系统地研究了J2不变相对轨道的存在性、生成算法及控制维持等问题。他在文献[125]中研究了从(E,Hz, Δr)到(Td,Ωd)的映射,其中E为轨道的Jacobi能量,Hz为角动量沿极轴的分量,Δr为伪圆轨道与伪椭圆轨道的距离测度,Td为节点周期,Ωd为角度漂移量。通过数值搜索发现,当Δr≠0时,相同的像(Td,Ωd)对应于不唯一的原像(E,Hz),从而说明了有界相对轨道的存在性。同理,J2不变相对轨道数值编队的方法可延拓到悬浮编队[126]上使用,通过Poincaré截面和Routhian变换技巧,建立悬浮轨道五维动力学参数(κ,α,E,Hz, Δr)到(Td,Ωd)的映射(其中κ和α分别为推力加速度的大小和俯仰角),由于映射是单射而非满射,很容易找到两条不同的悬浮轨道构成稳定有界编队。采用数值方法得到的结果直接满足有界条件约束而无任何简化,因此可直接采用所得到的初值初始化相对轨道,得到任意尺寸和极长时间内(或者理论上无限长)的有界相对运动。
5 结论
连续小推力非开普勒悬浮轨道经过30多年的发展已经取得了不错的理论成果,但目前的研究普遍没有考虑其他天体摄动,建立的动力学模型与真实天体模型还有差距;且受限于柔性太阳帆的工艺问题与电推技术发展的不足,悬浮轨道在近几年内还是很难应用于工程实践。
针对现有研究的不足,还需在已有的基础上进一步开展悬浮轨道的研究与探索,如考虑地心悬浮轨道的带谐项和田谐项摄动,求解摄动下的非开普勒悬浮周期轨道;探究在推力器非理想工作情况下关于悬浮轨道的重要结论是否还成立等。非开普勒悬浮轨道理论研究极大丰富了非线性动力学领域的研究内容,扩展了轨道动力学学科的研究范畴,可为航天器轨道设计和任务规划提供新的思路。随着小推力技术的发展,非开普勒悬浮轨道还可应用于地球导航增强任务、小行星探测等,为近地与深空探测任务提供新的平台。
