水下机器人的设计与CSMA/CD局域网控制系统的研究
2021-08-29夏长春匡兴红
王 烨,夏长春,匡兴红
(上海海洋大学 工程学院,上海 201306)
0 引言
当下,水下机器人在人类探索海洋之际扮演着越来越重要的角色。主要代替人工从事水下勘测,海洋生物的捕捞以及水下鱼群的观测等功能。本文综合了现在机器人的形状,设计了利用CSMA/CD技术局域网结合激光测距技术的专业化从事水下观测的水下机器人。
CSMA/CD技术局域网是一种操作方便快捷的水下机器人操作系统。基于对电脑中的“IP地址”和“子网掩码”进行修改,打开谷歌浏览器进行到主控制界面的方式实行对水下机器人的运动和摄像头的旋转控制。综合了多种文件,发现CSMA/CD局域网用在车辆控制和通信方面比较多,但是其操作方式并非采取的是运动控制平台界面一件操作系统,而是论述的是信号之间的转化。而对于水下机器人的控制则绝大数都是都是采用STM32为控制器为平台的控制系统,以水上遥控系统来控制机器人在水下的运动等操作。例如:李腊元[1]描述了以太网CSMA/CD环境下的一种冲突分解机制,提出了一种Enet协议,该协议要求网络中各站只有一种共用的信息,即传输延迟上限。郭健忠[2]基于以太网技术,通过分析模拟平台及i.MX6系统的AVB传输数据,实现车载通信网络。孙中全[3]基于以太网技术剖析了交换机环路的成因和环路的判断与检测方法。熊渊琳[4]基于单片机技术设计了一台可以实现机器人水下数据采集和回转的水下机器人,具有远程控制功能。何晓雄[5]设计了一台水下机器人,其控制系统采用STM32为控制器为平台的控制系统,来实现对下机器人的深度和姿态的控制。
1 水下机器人结构设计
1.1 水下机器人三维模型的构建
结合当前水下机器人的总体设计,其主要包括机器人本体外壳、耐压电子舱、电池舱以及推进器航行装置。利用三维制图软件对水下机器人外形进行建模,模型如图1所示。
1.2 潜浮装置的选型设计
针对水下机器人的推进运动是采用无刷防水电机和螺旋桨组合的方式。如图2所示。

1.3 耐压电子舱的设计和校核




仿真图中,耐压壳电子舱圆柱筒壁受到水下最大应力11.06MPa比许用应力42.5MPa要小。满足水下耐压壳电子舱的要求。从位移仿真图来看,最大变形位移为0.1094mm,变形部分为耐压壳电子舱圆柱筒壁中间部分。从安全系数仿真图来看,耐压壳电子舱仿真结果为蓝色,表明安全系数符合要求。因此水下水下机器人耐压壳电子舱其应力强度,最大位移强度变形和安全系数都满足条件要求。
2 运动控制系统的设计
2.1 引言
运动控制模块是水下机器人开展水下工作的核心模块[12]。由运动系统包括机器人前行、后退、左移、右移、上升、下降等的方面的综合运动。而本文水下机器人运动控制是基于以太网的陆地控制系统,原理就是以通过传输缆线将局域网内的控制运动信号传给水下机器人,从而实现水下机器人的水下运动[13]。
2.2 控制原理
2.2.1 水下机器人电控系统
水下机器人控制系统主要由水下CSMA/CD技术局域网运动控制系统、传输信号的防水缆线、水下机器人运动模块三部分组成。如图7所示。运动模块分为水平推进器和沉浮推进器,实现水下机器人前进、后退、左移、右移、下潜和上升等运动[14]。各个部分对电源消耗程度都有反馈环节,运动控制界面上时时显示电源的存量情况,当电源电量存量不多时,水下机器人停止工作。
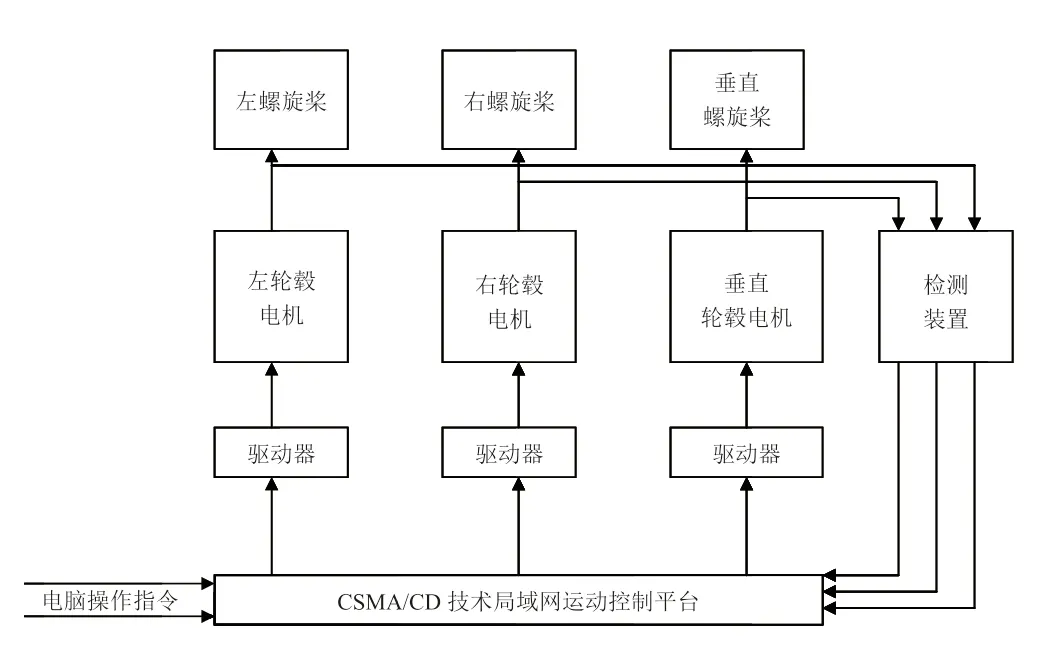
图7 水下机器人电机控制系统
2.2.2 功率器件的选择
随着科学技术的不断更新和发展,智能功率模块应该显著。它兼具着保护和驱动于一体。涵盖着驱动电路、二极管和开关器[15]。智能功率模块集成化高,结构紧凑缜密,体积小巧,能够有效地避免由保护延迟和分布参数等其他因素产生的一系列技术性的难题,有可靠和安全性,保正了稳定输出。
本文中的是功率器件TI和Digi-Key联合推出的ARM单片机开发板——BeagleBoard,如图8所示,它具有低成本、功能全面、体积较小且方便携带等诸多的优点,目前广泛应用于开源教育等技术领域。

图8 BeagleBoard驱动功率器件
BeagleBoard性能很好,功能完备齐全,其中最大的优点是它可以支持诸多开远程序,面对不同的开远等相关程序,都可以正常的工作。BeagleBoard驱动功率器件开发板周边接口如图8所示。
2.2.3 功率器件的选择和使用操作
本文水下机器人的控制器选用的第三代Arduino Mega2560,其相关参数表和引脚结构图如表3和图9所示。

图9 第三代Arduino Mega2560

表3 相关参数
操作上只需要连接好电脑的端口通过操作电脑,由电脑发出信号指令,则信号调制装置进行信号调制工作,再通过双绞线传送至Beaglebone Black板上,Beaglebone Black板将传输来的信号在传送给控制器模块,控制器模块接受来自Beaglebone Black板的信号指令,进行相应的信号整合再将控制信号传输给驱动器,驱动器根据控制器模块所传来的驱动信号驱动指定电机运转,使整个装置按照预先设定的方式进行相应的工作,其中可以通过对装置进行检测来实现电机的闭环反馈控制调节。
2.3 摄像头
2.3.1 水下拍摄的重要性
摄像头拍照技术是水下水下机器人的眼睛,跟人眼看事物一样,水下机器人的水下图像拍摄功能,用于观察水下环境。将水上拍摄技术搬到了水下,摄像头时时的水下拍照画面会出现在水上操作控制台的界面上,当看到水生生物时,结合激光测距技术,判断距离长度大小。
2.3.2 摄像头视角转换功能原理和设计方法
原先可以调整水下机器人自身的姿态来实现不同角度的拍摄视角,这样是通过对水下机器人的调节了,而且对摄像头的调整。如果在有限的耐压电子舱空间,对内摄像头本身调节,使得摄像头在机器人车身不动的情况下,自己进行不同程度的旋转运动,旋转的范围是30°~150°,这样就可以表现出在水下的拍摄视角的灵活性,可以得到不同角度的图像画面。
如图10所示,摄像头装置中电动舵机旁边连接着内侧支架相。而在摄像头整体装置的尾部保留着一些缝隙,这样使得内侧支架在舵机的牵引下沿着水平方向转动,与此同时内侧支架和外侧支架相互粘合连在一起,二者由卡口相互配合连接,从而带动上侧支架沿着水平方向一起转动。摄像头整体装置整体安装在上侧支架上,所以摄像头整体装置也可以随着上侧支架沿着水平方向转动。摄像头整体结构左边和外侧支架之间有着虚约束,对安装主侧板可以起到很好的支撑作用,这样使得摄像头和各个支架板之间能很好的沿着水平方向转动。这样很好的体现出双曲柄机构的运动原理,然后受安装主侧板的位置影响,整个摄像头可以旋转30°~150°的转角,实现不同角度的拍摄。

图10 摄像头整体装置
2.4 CSMA/CD技术局域网控制
CSMA/CD技术局域网(又叫以太网),它是一种基于局域网控制技术,把同轴电缆当做网络媒介,利用冲突检测机制和载波多路访问技术,使得数据传输速率高[16]。它用处很广泛,尤其在小范围的控制系统中,以太网受到广大的青睐,人们使用的多。其操作控制台界面简单、方便和快捷,而且运行速度快、效率高。制造和购买的价格很便宜,控制系统的信号传输速率特别高,能到达10MBPS。只要在操作控制台界面中点一个指令,控制信号的另一头会快速做出对应的操作。
本文水下机器人采用CSMA/CD技术局域网,对水下机器人进行运动控制。进入到水下机器人的控制系统操作界面的操作过程为:首先在电脑“开始”菜单栏中搜索“cmd”命令,将电脑“命令提示符”的操作界面调出,命令行窗口如图11所示,然后在电脑的输入法为英文输入状态时,在“命令提示符”的操作界面中输入“Ping 192.168.254.1”程序语句,并按“回车”键,当电脑跳出“来自192.168.254.1的回复”等三行信息时,操作成功。

图11 命令提示符操作界面
对电脑的局域网进行设置。关闭电脑无线连接的“Wi-Fi信号”进入到“以太网属性”操作界面,此时Simulation软件进行仿真分析求出耐压壳电子舱仿真应力,跟理论计算值接近,满足应力设计需求。


3 水下机器人的实物制造
3.1 水下照明灯和摄像头的选型及制造装配


3.2 激光测距
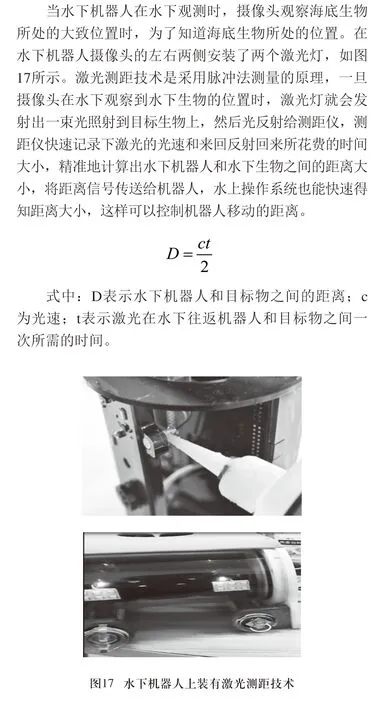
4 水下拍摄实验


5 结语

在控制原理中,介绍了总体的运动控制总体框架图,主要是CSMA/CD技术局域网控制驱动器进而控制防水电机带动螺旋角的旋转运动。分析了BeagleBoard驱动功率器件和Arduino Mega2560控制器的选择、参数配置和优点的介绍。分析了CSMA/CD技术局域网控制,采用CSMA/CD技术局域网,通过控制器,改变电脑无线网的IP设置和子网掩码,实现对水下机器人的运动控制,界面简单,操作方便。
针对设计图对实物进行了制造,在制造的过程中,介绍了水下水下照明灯的选型、摄像头视角转换功能原理与设计方法及摄像头的选型及制造装配。采用了激光测距技术,利用脉冲法原理方便测量水下机器人和水下生物之间的距离。最后对制造出的水下机器人进行了水下运动和拍摄实验,运动状态良好,拍摄的水下画面清晰且视角灵活。
