基于激光雷达的水利工程质量安全检测方法
2021-08-27韩友春金丛成
韩友春,金丛成
(江苏禹衡工程质量检测有限公司,江苏 盐城 224000)
水利工程质量安全检测指的是具备资质的检测单位对水利工程的施工质量、材料、产品等进行检验、度量,同时比较材料应用效果,确定水利工程质量是否符合标准[1]。由此可见,水利工程质量安全检测是保障与维护水利工程质量安全的基本。
质量安全检测是保障水利工程应用功能正常使用的根本保证,例如交通运输功能、农田灌溉功能、防洪排涝功能等[2]。在本质上来看,质量安全检测对一个国家的社会建设与经济发展具有至关重要的意义。在水利工程质量安全检测过程中,堤防质量安全检测方法主要包含人工探视、地质钻探等,混凝土质量安全检测方法主要包含钻芯法、回弹法与超声波法等。
现有水利工程质量安全检测方法中,主要采用钻芯法检测水利工程质量安全,该方法具备较高的探测精度,但也具备着一定的破坏性,并不具备连续性,导致现有方法存在检测离散度较大、全面性参数较小的缺陷,为此提出基于激光雷达的水利工程质量安全检测方法。激光雷达指的是以发射激光束探测目标位置、速度等特征量的雷达系统[3]。激光雷达是一种机械设施,具备分辨率高、隐蔽性好、抗干扰能力强、低空探测性能耗、体积小、质量轻等优势,另外,激光雷达不会对水利工程造成损坏与影响,并可以全面的、准确的、连续的、高效的检测水利工程质量安全。此研究引入激光雷达机械设施,希望改善现有方法存在的缺陷,提升水利工程质量安全检测的性能。
1 水利工程质量安全检测方法研究
1.1 激光雷达测线与天线布置
为了精确的检测水利工程质量安全,引入激光雷达机械设施,首要的任务就是合理布置激光雷达测线与天线,具体布置过程如下所示。
依据水利工程质量安全相关规定,采用网格式布设激光雷达测线,具体情况如图1所示。

图1 激光雷达测线布置示意图
如图1所示,激光雷达测线横向六条,间距为10 m;纵向4条,间距范围为0.5~2 m。
采用美国GSSI SIR-30E雷达作为此研究激光雷达,其天线中心频率包含40 MHz、100 MHz与200 MHz,每根天线布测上述激光雷达测线,共计10条检测断面[4]。依据水利工程实际情况,设置间距为1m加密检测水利工程质量安全,总计检测天线长度约为1500 m。激光雷达天线配置情况如表1所示。

表1 激光雷达天线配置表
上述过程完成了激光雷达测线与天线的布置,为下述水利工程质量安全检测做准备。
1.2 激光雷达检测参数设置
激光雷达检测参数直接影响着激光雷达检测的效果,其检测参数包括天线中心频率、时窗、采样率与测点间距,具体参数设置过程如下所示。
天线中心频率[5]主要由检测目标深度、尺寸等因素来决定,计算公式为
(1)
式中:f表示的是天线中心频率,单位为MHz;x表示的是空间分辨率,单位为m,实质上是激光雷达检测物质尺寸最小值;εr表示的是相对介电常数。
当相对介电常数εr一致时,不同检测深度对应着不同的天线中心频率需求,具体如表2所示。

表2 深度对应天线中心频率一缆表
时窗[6]计算公式为
(2)
式中:W表示的是数据采集时窗;dmax表示的是检测深度最大值;V表示的是电磁波速度。
常规情况下,在激光雷达使用过程中,通过会将时窗增加30%,以此来保证检测速度与深度含有一定的余量[7]。不同介质对应着不同的时窗需求,具体情况如表3所示。

表3 不同介质对应时窗一缆表
采样率[8]由天线中心频率决定,计算公式为
(3)
式中:ζt表示的是采样率。
由式(3)可以看出,不同天线中心频率对应着不同的最大间隔采样时间,具体数值如表4所示。

表4 不同天线中心频率对应最大间隔采样时间一缆表
测点间距[9]由天线中心频率与介质介电特征共同决定,计算公式为
(4)
式中:c表示的是测点间距计算常数,此研究中取值为75/4。
1.3 激光雷达检测数据处理
以上述布置的激光雷达测线与天线以及设置的激光雷达检测参数为基础,确定激光雷达作业方程,获取水利工程检测数据,并对其进行相应的处理。
激光雷达作业方程[10]表达式为
(5)
式中:PR表示的是接收天线频率;PT表示的是发射天线频率;GT表示的是天线发射的增益数值[11];GR表示的是天线接收的增益数值;λ表示的是激光雷达子波在介质中传播长度;g表示的是障碍物在激光雷达波面上发射的截面因素;α表示的是介质传送的衰减系数;R表示的是障碍物与雷达天线的距离[12]。
若激光雷达与接收天线配合默契,则雷达信号有效部分与噪声[13]比例关系表达式为
(6)
式中:S与N分别表示的是雷达信号有效部分与噪声;N0表示的是噪声周围环境背景功率密度,计算公式为N0=2KB·T0·FN;KB表示的是波尔茨曼常数,取值为1.38×10-15J/k;T0表示的是温度;FN表示的是噪音系数[14];GM表示的是常数,取值为1。
依据公式(5)获取水利工程检测数据,其处理程序如图2所示。
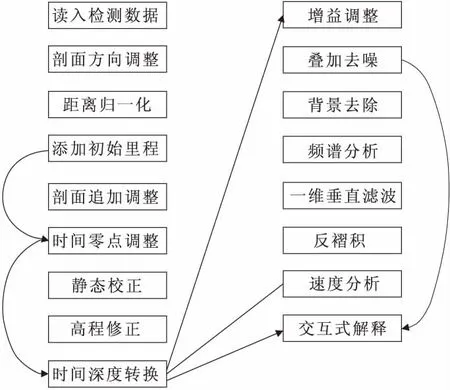
图2 激光雷达检测数据处理程序图
如图2所示,水利工程检测数据处理子程序较多,由于篇幅的限制,此研究针对滤波处理与振幅恢复处理进行详细分析。
滤波处理中,最关键的就是滤波参数的选取,具体选取规则如表5所示。

表5 滤波参数选取规则表
振幅恢复处理表达式为
A0=Ateβt
(7)
式中:A0表示的是反射波真振幅;A表示的是激光雷达的实际反射波振幅;t表示的是双程走时时间;β表示的是吸收系数[15]。
1.4 激光雷达图像精细化变换
以上述获取的激光雷达检测数据为基础,为了能够精确的凸显雷达图像特征,此研究利用K-L变换算法精细化变换激光雷达图像[16]。
假设原始激光雷达图像矩阵为XN×M,其协方差矩阵表达式为
CX=E{[X-E(X)][X-E(X)]T}
(8)
式中:E(X)表示的是X的数学期望。
求解公式(8)特征向量矩阵,表达式为
(9)
通过K-L变换算法正交转换雷达图像,转换公式为
YN×M=AN×NTXN×M
(10)
通过上述过程完成了激光雷达图像的精细化变换,为水利工程质量安全判断提供依据。
1.5 水利工程质量安全判断
以获取的精细化激光雷达图像为基础,获取激光雷达特征分布图,横轴为特征值序号,纵轴为特征值,依据激光雷达特征分布图判断水利工程质量安全状况。
常见地质波形特征如表6所示。
如表6所示,若反射波波形时断时续,同相轴不规整,表明混凝土结构质量较差;若雷达图像中存在异常反射,则表明混凝土、隧道围岩之间形成了空气层,称为脱空现象;若雷达图像中,反射强度较弱,则表示水利工程中衬砌较为松散[17]。
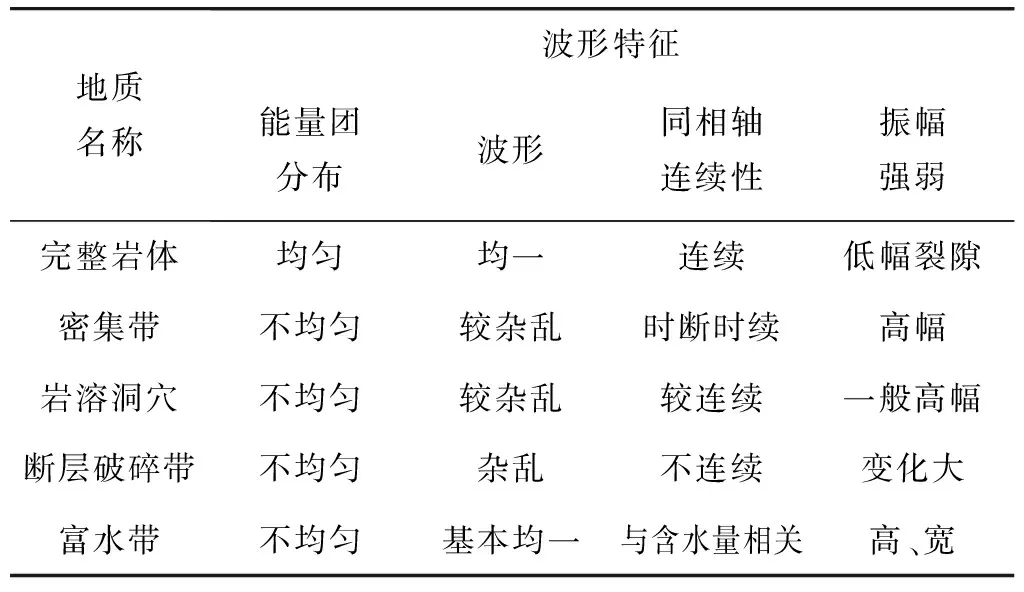
表6 常见地质波形特征表
综上所述,实现了水利工程质量安全的检测,为水利工程的建设与发展提供更加有效的帮助。
2 仿真实验与结果分析
2.1 实验对象选取
为了验证提出方法的性能,设计仿真实验,首要任务是选取实验对象。选取某市二级排污河道水利工程作为实验对象,其水流量为25 m3/s,是全市排水量的60%以上,承担着排污的功能。
二级排污河道水利工程是该市关键排水河道,关系着居民的财产与生命安全,由此可见,实验对象质量安全的重要程度。
实验对象水利工程利用临时围堰、堤防全开挖方式进行,待水利工程完工后,拆除临时围堰,恢复堤防功能。为了保障堤防质量安全,利用激光雷达对其质量安全进行相应的检测,具体实验过程如下所示。
2.2 激光雷达检测准备
在仿真实验开始前,需要到水利工程现场进行详细勘查,对实验对象、尺寸、深度、交通状况、工作环境等进行记录。依据上述勘查信息,结合收集的相关资料,选取适当的天线中心频率,合理布置激光雷达的测线与天线。
激光雷达机械设施连接示意图如图3所示。

图3 激光雷达机械设施连接示意图
激光雷达检测方式主要包含反射、共中心点、宽角与透射四种方式,依据此研究需求,选取反射检测方式,示意图如图4所示。

图4 激光雷达反射检测方式示意图
另外,需要对激光雷达设备进行一定的保护。例如不折叠电缆绕圈、不重压雷达电缆、不磨损激光雷达电缆线等。
上述过程完成了激光雷达检测设备的准备,为仿真实验的顺利进行提供依撑。
2.3 实验结果分析
依据上述选取的实验对象、准备的激光雷达检测数据等进行仿真实验,通过检测离散度与全面性参数反映方法性能,具体实验结果分析过程如下所示。
通过仿真实验得到检测离散度数据如表7所示。
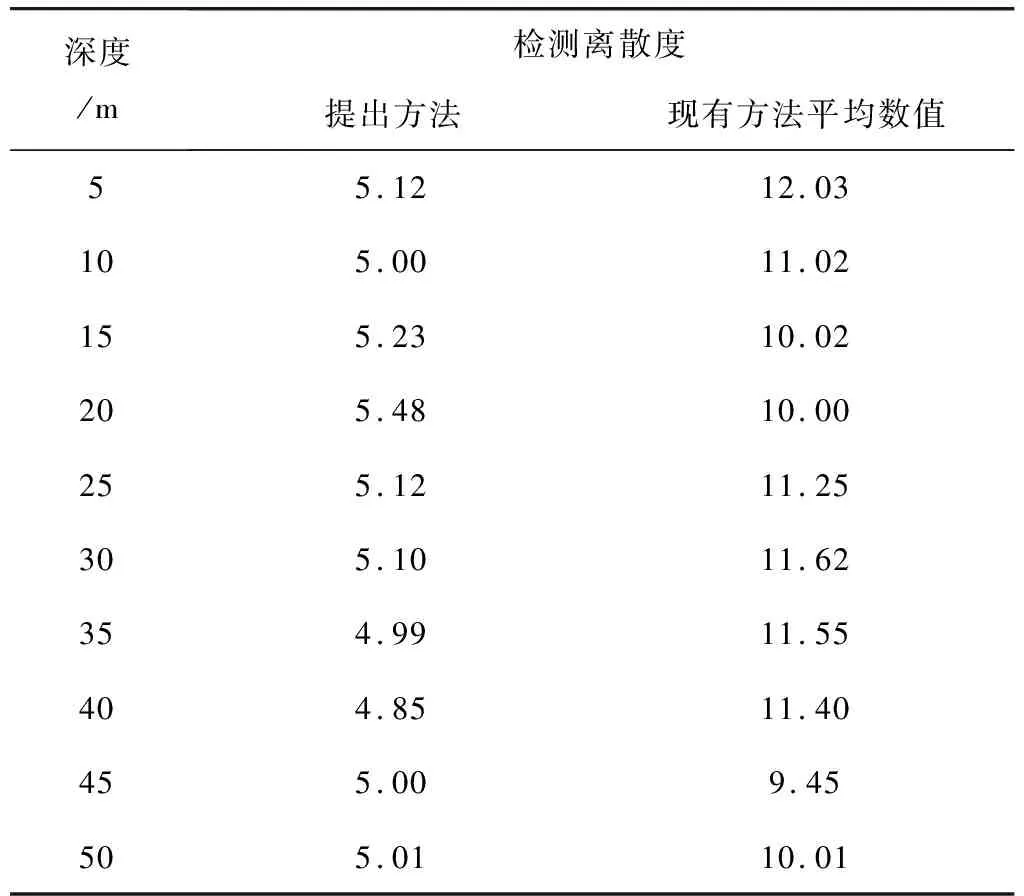
表7 检测离散度数据表
如表7数据显示,提出方法的检测离散度参数范围为4.85~5.48,现有方法平均数值范围为9.45~12.03,通过对比研究发现,提出方法检测离散度参数远远低于现有方法平均数值。
通过实验得到检测全面性参数数据如表8所示。

表8 检测全面性参数数据表
如表8数据显示,提出方法的检测全面性参数范围为8.45~9.45,现有方法平均数值范围为4.26~6.45,通过对比研究发现,提出方法检测全面性参数远远高于现有方法平均数值。
上述实验结果显示:与现有方法平均数值相比较,提出方法检测离散度更小,全面性参数更大,充分说明提出方法水利工程质量安全检测性能更佳。
3 结语
此研究将激光雷达引入到水利工程质量安全检测方法设计中,极大的降低了方法检测离散度,提升了方法检测全面性参数,为水利工程质量安全提供了更加精确的检测方法,为水利工程发展以及功能应用助力,适合大力推广使用。