基于捷联惯导系统的采煤机定位技术
2021-08-27刘瀚文
刘瀚文
(国家能源集团 乌海能源有限责任公司,内蒙古 乌海 016000)
煤炭能源是无法被其他资源取代的,是一种极富竞争力的经济型资源[1]。我国在资源方面具有“富煤、贫油、少气”的特征,由此使得煤炭资源在整体的资源占比和使用上都居于主要地位,且此种情况一直未变。在原始煤产出量方面,2018年已完成近37亿t,一直稳居全球首位,标准煤的销售数量共计达46亿t,煤炭消费总量在能源消费总量当中的大约占了60%,当前我国已探知到的煤炭储额占全球的1/3以上。预计中国煤炭消费总量到2020年,将达到48亿t左右[2-6]。国内外学者们对采煤机的动态定位开展了系统深入的实验与工程应用研究。张斌等[7]提出了基于陀螺仪和里程计的无人工作面采煤机自主定位系统,并在模拟实验中取得了较好的定位效果,然而里程计存在固有累积误差制约定位精度提高的问题。樊启高[8]利用捷联惯性导航系统建立了采煤机的位置定位模型,并对采煤机的截割路径进行了惯性导航仿真。吕振等[9]基于捷联惯性导航进行了井下移动目标精确定位系统的研究,并且对传感器的误差进行了分析乌海能源有限公司到老石旦煤矿地址在内蒙古自治区,乌海有葡萄之乡、书法之城、黄河明珠以及沙漠绿洲等美称。老石旦煤矿在采煤过程中普通的惯性零件会出现漂移的情况,经过长时间使用,会造成惯导系统的精准度降低,运用捷联惯导技术能有效解决此问题。综上,捷联惯导系统在运行过程当中不受外界因素干扰,不需要其他信息为辅助,同时也不会散发出辐射,该系统能全面的获取数据,在短时间内实现高精准度定位,同时又具有能快速更新数据的优点,当前已经被众多煤矿以及科技人员用于采煤机以及井下人员的定位分析环节。其对于全球煤炭开采行业都有着重要的意义,同时也能将高效化、安全化和绿色化融入到国内在煤矿的研究和发展领域。
1 捷联惯导系统的原理
捷联惯导系统是采煤机普遍用到的定位技术,工作原理是在采煤机上连接加速度计以及陀螺仪,对采煤机的旋转角度、速度以及加速度矢量进行测量,此时的数据是采煤机处于相对于惯性坐标系条件下的数据,之后按照开始载体处于的位置、姿态和速度,对之后任意时间采煤机在同等条件下的角度、位置和速度加以计算。加速度在一次积分之后就能得出机器的速度,经过二次积分能获得其位置。可以通过对坐标的变化把速度、位置和姿态向所需的坐标系变化。
美国在20世纪80年代开始,就将开创性实验落实到了煤矿控制和自动化的领域,研究的主要内容就包含对惯性系统的测试,但因为此系统存在精确度不足的问题,未能在煤矿领域投入使用。之后NIOSH研究所以寻找更实用的定位技术为目标,在诸多传感系统和技术中进行了测试研究,最后惯导技术脱颖而出。此系统由3个线性加速度计和三轴陀螺仪组成,当需要对加速度进行积分来获知采煤机的位置姿态信息时,一定要以某一参考坐标系为条件。因此,应掌握各空间的坐标系并加以定义才能进一步研究、分析定位技术。惯导系统的解算基础是惯性定律,也就是牛顿力学。地球坐标系、导航坐标系、惯性坐标系以及采煤机坐标系相互的关系能获得导航数据。
(1)地球坐标系和地球相关联,相对于惯性坐标系,围绕着地球自转角速率进行旋转,Ye与Xe处于赤道平面內,轴Ye指90°E,轴Xe指向格林尼治经线,轴Zi重合于轴Ze,λ为经度,L为维度。
(2)导航坐标系用N系表示,采煤机位置所包含的东北天方向由此坐标系表示。采煤机的位置用原点On来表示,Xn表示的是东,Yn表示的是北,Zn表示的是天。
(3)惯性坐标系的简称是Ⅰ系,将地球的中心位置用Oi表示,即坐标系中的原点,Zi指北极方向地轴,Xi和Yi处于赤道平面内,组成了右手坐标系,用于测量惯性元件。
(4)采煤机坐标系即B系,采煤机的重心处是圆点,用Ob表示,轴Yb表示推进的方向,轴Xb表示牵引的方向,轴Zb表示向上竖轴。
(5)采煤机姿态包括3个方面,①横滚角γ;②俯仰角θ;③航向角φ。导航坐标系与采煤机坐标系两者的转角能确定这几个角度,轴Zb来自采煤机坐标系,其和平面OnZnXb形成的夹角就是横滚角γ,范围是-90°到90°;平面OnXnYn来自导航坐标系,轴Xb与其组成的夹角就是俯仰角θ,其范围为-90°~90°;轴Xb在平面OnXnYn中得出的投影夹于轴OnYn的角就是航向角φ,正向为采煤机的北偏东,范围是0°~360°。
2 采用捷联惯导系统的采煤机定位模型
在自动化开采当中,采煤机是至关重要的设备,要发挥采煤机的自动化优势,需要将自动化融入刮板机、液压支架以及采煤机,使三者配合工作,监测采煤机的位置极其重要,利用位置监测科技来对机器的工作状态进行采集,同时对位置关系加以计算,将运行轨迹准确地预测出来,从而优化采煤机和其他设施的联合工作,满足斜切进刀、跟机作业以及调直等方面的作业需求,减少采煤用人数量,甚至实现无人自动化采集。采煤的时候,装煤及落煤是采煤机的主要作用,换句话说,就是利用滚筒截割煤壁来实现把煤放到刮板输送机上,再运用转载机和输送机把煤送出。然后采煤机进入割煤的环节,随着采煤机位置的变化,液压支架随时移动刮板运输机的位置。再进行到一刀割煤之后,接着要采用斜切进刀。端部斜切进刀、中部斜切进刀是当前常用的进刀方法。前者指的是在进刀时从端部进入,按照一定的截深长度实施斜切至煤壁,接着按照工作面的路线继续前进,等到全部进入之后割出三角煤,之后再进行这一截割步骤。
在进行作业时,工作面的移动方向和刮板机的移动方向会使采煤机的位置发生变化,也会因为煤层的高度而发生变化,当煤层的走向、工作面倾斜角度以及斜切时进刀的变化都会引起采煤机的姿态和位置发生改变。通过观察采煤机在运动时的变化情况可以得知,三维位置和三维姿态的变化表现在采煤机的工作过程中。想要完善个部分的自动化协作配合,就需要对采煤机的姿态以及位置加以精准测量。此时就需要运用捷联惯导系统发挥作用,将其安装在机器上,准确、实时得出加速度信息依靠的是加速度计,而获取机器实时的姿态数据依靠的是陀螺仪,想要对采煤机的动态位置进行预测和计算,就必须运用上述两者的功能来获取信息(图1)。

图1 煤矿综采工作面“三机”工作示意Fig.1 Working diagram of "three machines" in fully-mechanized coal mining face
3 采用捷联惯导系统的采煤机定位方法
3.1 捷联惯导系统坐标系建立
此系统要计算出位置姿态等方面的信息就必须通过数学计算的方法,转换需要在坐标轴中实现。其坐标的圆心是机器的重心,按照东北天方向进行导航坐标系的建立;机器的质心作为中心,轴xb是机器前进的方向,从平面俯视和该轴垂直的是轴yb,轴zb在和平面垂直方向,由此实现坐标系的建立,具体坐标系如图2所示。
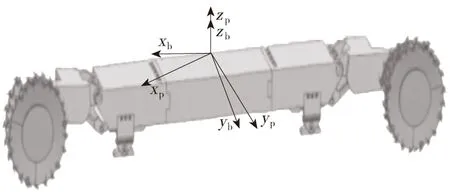
图2 采煤机捷联惯导系统坐标系Fig.2 Coordinate system of shearer strapdown inertial navigation system
3.2 位姿解算
为了能让位置数据处于机身、导航坐标系两者当中变化,需要用到的是姿态矩阵,从而使测量的数据值变为实际数值。所以说,需要运用捷联惯导系统来对位置姿态进行解算。解算该矩阵常用的方法是:四元数法和欧拉角法。两者相比较来说,欧拉角法能直接的结算出航向角、横滚角以及俯仰角,同时用到的算式不多。故而,本文对姿态矩阵的结算采用欧拉角法。设γ是采煤机的俯仰角,θ是采煤机的横滚角,ψ是航向角,运用欧拉角法对矩阵进行解算的方程是

采煤机坐标系当中的各轴角速度由ωx,ωy,ωz来表示。对各个方向的加速度做二次积分,就能将机器在此方向固定时间內的前进路程计算出来。由此获知了姿态角和距离,就能得出机器的移动位置和姿态,进而做出定位。
4 采煤机姿态调整方法
4.1 采煤机姿态确定
采煤机斜的角度、滚筒高以及摇臂运动时候的角度是采煤机姿态的表现。当利用节联惯导系统获取采煤机具体定位的同时,也能够获取其倾角的数据。在机器摇臂上安装传感器,就能够获知摇臂的角度。对滚筒高度进行控制对截割环节有着极其重要的作用,底板角度不同,将滚轮调至适当的高度,由此才能实现截割的正常操作。
4.2 采煤机截割高度调整方法
当采煤机在进行割煤作业时,每一刀的形状都会发生细微的不同,这就需要机器实时性获知纵向、横向的切角,才能做到对割煤高度做出及时调整。利用传感器测量出机器的横滚角和俯仰角,根据摇臂角度和机身的角度形成的关系来计算得出机器的倾角和截割之间的具体关系,从而才能做到实时性调节。
5 结论
研究煤矿当前存在煤层赋存较差的问题,使得该煤矿在初期的规模不大。在市场不断发展以及开采设施逐渐完善的环境下,矿井开采将会是主流趋势。因此,要不断的进行技术手段升级。在技术升级过程中,需要具有科学性的规划做基础,从而避免资金成本等方面的浪费。将乌海的能源优势和捷联惯导技术相结合,使采煤能够更精准、更高效。
首先,本文针对煤矿井下采煤机定位环境恶劣、空间封闭以及干扰较多的问题,提出了一种在采煤机上直接固联捷联惯性导航系统的采煤机定位定姿方法。其次,本文围绕着将捷联惯导技术运用于采煤机的定位和开采中,通过该系统发挥优势来获得采煤机的位置以及运动数据,并通过欧拉角法计算求解数据,寻找到对采煤机位置和姿态的解算以及实时化定位,同时对采煤机的截割高度进行分析,将该系统与机器姿态的调节方法加以阐述。在采煤机运行过程中,捷联惯导定位系统能够实时的对采煤机的姿态和运动轨迹进行跟踪,提高采煤机位置定位精度,满足煤矿井下采煤机定位要求,同时验证了捷联惯导对于煤矿井下采煤机定位的适用性。但是,本文也存在一定的不足之处,由于采煤机恶劣的工作环境和复杂的干扰,再加上捷联惯导本身存在的加速度累积误差对系统的定位精度影响很大,故下一步研究内容主要是开展采煤机捷联惯导的振动误差补偿和利用外部定位技术进行数据融合方面的研究。
