一种改进鲸鱼算法及其在短时交通流预测中的应用研究
2021-08-24胡松,成卫,李艾
胡 松,成 卫,李 艾
1(昆明理工大学 交通工程学院 ,昆明 650500)
2(玉溪市公安局交通警察支队,云南 玉溪 653100)
1 引 言
群智能算法是对自然环境中一些生物的群体行为特征进行模拟而得出的一类算法,如观察鸟类捕食方式模拟出的粒子群算法,根据生物进化得到的遗传算法[1]等在现在的众多领域如电力调度、资源配置、计算机应用、医学分析等有着广泛应用.鲸鱼优化算法(Whale Optimization Algorithm,WOA)[2]在2016年由澳大利亚学者Mirjalili通过对座头鲸觅食行为的研究,得到的一种新的群智能算法,WOA主要是模拟鲸鱼在捕猎过程中的靠近猎物的行为,从而找到复杂寻优问题的最优解.标准WOA具有参数少,全局收敛性好等优点,因此大量学者开始将该算法用于实际应用当中.如D.B.Prakash[3]等将WOA应用于径向网络中电容的选址问题,证明了WOA在维持电压的稳定性和优化运行成本上的优越性.Pradeep Jangir[4]等使用WOA训练多层感知器,解决了局部最优问题,获得了较高的寻优精度;但是同传统的群智能算法一样容易陷入局部极值及收敛速率慢这些问题,学者们提出了一些改进的方法,例如闫旭[5]等将量子算法加入WOA中并用来解决TSP问题;郭振洲[6]等使用自适应权重和柯西变异改进WOA.
在以前学者的研究基础上,本文针对WOA前期收敛速度较慢以及容易陷入局部最优解的问题,提出一种基于自适应权重和天牛须搜索[7,8](Beetle Antennae Search,BAS)的鲸鱼优化算法.改进的算法通过将鲸鱼优化算法中的搜索捕食策略使用天牛须搜索策略代替,加快前期的搜索能力和提升搜索精度;同时在包围捕食和气泡网攻击中引入了自适应权重增强后期的局部搜索能力,通过测试函数仿真表明,改进后的自适应天牛须鲸鱼混合优化算法(ABOA)相较于粒子群算法(PSO)、遗传算法(GA)以及标准鲸鱼优化算法(WOA)在收敛速度及收敛精度上有了明显提升.
智能交通系统被认为是缓解道路拥堵,加强交通安全,促进节能减排的有效方法之一,可以帮助出行者带来实时有效的交通信息从而在交通路径选择上作出更有效的判断,缓解城市交通压力,提高出行者的出行效率.随着海量的交通数据被人们获取,短时交通流的预测也变得越来越可靠,对智能交通系统的帮助也日益增大.在交通流预测上前人已经有了大量的研究,钱伟[9]使用相空间重构优化Kalman滤波进行短时交通流预测,解决了Kalman滤波模型时间滞后性的问题;Kumar[10]把季节性的影响结合进了车流的变化中,提出了一种基于季节的SARIMA模型,将原本的ARIMA模型进行预测时的适用范围进行了扩大;Wu[11]等使用改进K-近邻预测模型对短时交通流作出了预测,并在不同时间点和条件下验证了其预测的适用性.傅贵等[12]引入核函数,把属于非线性回归的短时交通流预测问题转化为Hilbert空间中的线性回归问题,建立了基于SVMR的短时交通流预测模型.LSSVM是SVM的改进,可以有效地对处理非线性数据,并且其训练时间短,适用性强.王贺[13]等使用聚类经验模态分解和LSSVM组合进行短时风能预测;Liu[14]等使用改进的GSA算法优化LSSVM构建汽轮机热耗率预测模型,并证明了其有效性;Sun[15]等使用LSSVM进行了PM2.5浓度预测.LSSVM进行回归预测时主要依赖参数选择,直接影响模型的性能.前人已有使用粒子群算法,遗传算法等进行参数寻优[16,17],并取得了较好的效果.文中采用改进的WOA算法将LSSVM中的两个参数(核函数参数和惩罚系数)进行自动搜索确定,得到了一种ABOA-LSSVM短期交通流预测模型,并进行了实验验证其有效性.
2 鲸鱼优化算法
鲸鱼优化算法具有原理简单、操作简易,易于实现,需调整的参数少及鲁棒性强等特点.在函数优化方面,WOA算法在求解精度和稳定性上要明显优于粒子群(PSO)、差分进(DE)和引力搜索(GSA)等算法.通过模拟座头鲸的捕食猎物的过程中的一系列行为,从而获得优化的数学模型,从而完成的算法.该算法主要包含有3个阶段:包围猎物(encircling prey)、气泡网攻击(bubble-net attacking)、搜寻猎物(search for prey)3种方式.下面是3种方式的简单介绍.
2.1 包围猎物阶段
在鲸鱼捕食开始时,算法假设当前的最优捕食个体的位置是最佳捕食位置,然后剩余个体朝着最有位置靠拢,其数学模型表示为:
(1)
(2)
式中:A和C为系数向量;X*(t)为当前最佳个体位置,X(t)表示当前个体位置,t表示迭代次数.系数向量A和C用来控制鲸鱼的游走方式,计算公式如下:

(3)
(4)

2.2 气泡网攻击阶段
在WOA算法中,群体中个体的位置更新方式是根据生成使得随机数的取值来在螺旋式位置更新和缩小包围范围(shrinking en-circling mechanism)这两种更新方式中选取.
1)收缩包围 即减少式(3)中的a值.在这个过程中,A在区间[-a,a]内进行取值,如果这个区间范围发生改变,那么a的值也会随之发生变化,若A在区间[-1,1]内进行取值,则鲸鱼的游动位置将处于当前位置和猎物位置中间某个位置,这种方式体现出了鲸鱼个体的局部搜索能力.包围过程根据式(1)进行更新.
2)螺旋式位置更新 即鲸鱼个体通过螺旋形的运动方式靠近群体中的最优位置,螺旋式位置更新的数学模型表示如下:
(5)
(6)
式中:D′为第i头鲸鱼当下位置与当前最佳个体间的间距,参数b则表示一个定义对数螺旋形状的常数;l是[-1,1]上的随机数.座头鲸在围捕猎物时一边以螺旋形态游向猎物一边缩小包围圈,以0.5作为临界值进行自身位置的更新.更新位置的公式为:
(7)
式中p为[0,1]区间上的随机数.
2.3 搜索捕食
除使用气泡网法搜索策略以外,鲸鱼个体还能够随机游走搜索猎物,更新时依据系数A的变换进行选择.式(8)、式(9)表示当|A|不小于1时,鲸鱼个体随机向别的鲸鱼靠拢,距离值D则随机更新,从而扩大搜索范围,使捕食能力提升,这样WOA就拥有一定程度的全局搜索能力.数学模型表示如下:
(8)
(9)

3 鲸鱼群优化算法的改进
本文将WOA与天牛须搜索算法结合在一起,将WOA的随机搜索行为用天牛须搜索来代替,加快算法的前期收敛效率,并保证WOA的遍历性增强算法的全局搜索能力,避免陷入局部最优.加上自适应权重使得算法在后期的局部搜索时提高搜索精度,保证算法后期的收敛精度.
3.1 自适应权重
WOA实现局部寻优的操作是按照公式(2)和公式(5)进行局部搜索的,这时当鲸鱼按照公式(2)朝着局部最优解逼近时,这时只能逼近局部最优解,而不能进行更好的局部寻优,如果当鲸鱼接近食物的时候,采用较小的自适应权重改变此时最优的鲸鱼的位置,则会提升WOA的局部寻优能力.自适应权值公式如(10)所示;改进后的自适应更新公式如(11)所示:
(10)
(11)
式中,t表示当前迭代次数,而T表示最大迭代次数.
3.2 天牛须搜索策略
天牛须搜索算法(BAS)是2017年由研究人员通过观察天牛觅食的行为而得到的智能算法,它是根据天牛左右触角接受到的食物气味浓度的差别来决定位置更新的方向,从而到达食物位置.天牛须搜索算法属于个体智能算法,只需要一个个体,算法的运算速度快,算法个体的位置定义如式(12)、式(13)所示.
1)天牛的朝向是随机的,通过以下公式定义为:
(12)
2)天牛左右须的空间坐标按如下所示创建:
(13)
式中:t是算法循环次数;d是天牛左右须间的距离.
3)天牛的位置按照以下公式更新:
x(t+1)=x(t)+σtbsign[fr-fl]
(14)
式中,fr和fl表示的是适应度;σt表示在第t次更新时的距离;sign()表示符号函数.在进行寻优时使用δt=αδt-1,其中α为步长因子,通常设成0.95,这样可以通过α来逐渐减小更新时的步长,能大大提升BAS算法的寻优能力及收敛速率.
改进算法的主要步骤如下:
步骤1.初始化.设置鲸鱼群的种群大小、鲸鱼优化算法迭代的次数以及天牛须算法步长等参数.
步骤2.设定鲸鱼群的迭代次数t=0,比较初始种群中全部个体的适应度值,将鲸鱼群中适应度值最好的个体所代表的状态记录到公告板中,记录最好的适应度值.
步骤3.将迭代次数加1,对每一个个体下一步的的位置进行评价,根据评价选择下一步所要执行的操作,包括:收缩包围,螺旋位置更新或者随机位置更新.将算法中的随机位置更新方式用天牛须搜索算法代替,即将式(9)使用式(14)代替进行一次天牛须算法寻优,然后则将最优适应度的值输出.当评价完3种行为得到的适应度之后,将适应度值进行比较,从而选取鲸鱼个体的下一步位置.同时将更新后的鲸鱼群中的最好适应度与公告板中记录的最好适应度进行对比,及时更新公告板.
步骤4.判断混合算法的迭代次数是否已经达上限,若没达到则返回步骤3,如果满足则选取适应度值最好的个体进行输出.
4 算法的实例测试与分析
本文通过对选取的18个不同类型的基准测试函数进行仿真实验来验证ABOA算法的寻优能力.表1-表3给出了18个基准测试函数的详细相关信息.其中,F1-F7选取的是单峰函数,F8-F12选取的是多峰函数,F13-F18为固定维函数.函数仿真实验结果与分析

表1 单峰函数

表2 多峰函数

表3 固定维函数
将ABOA算法与PSO算法、GA算法以及WOA算法进行对比试验,每种算法进行50次实验,把50次寻优的结果取平均值以及计算最优解的标准差放在表4中(表中部分数据来自文献[4,8]).
根据对单峰、多峰、固定维函数的测试比较,从表4可以看出ABOA在函数F1、F3、F9、F11、F17都收敛到了最小值,而且标准差为0或者接近0;在测试函数F2、F4、F7、F10迭代结束后没有收敛到最优解,但是在收敛精度上,稳定性上都优于其他3种算法;F5的求解精度优于GA,PSO算法,相对WOA算法略差;对函数F6的求解精度仅次于PSO算法;对函数F14的求解精度仅次于GA算法;对F15,F16、F18来说和其它3种算法相比,优化前后差距不明显;仅对F8进行优化时结果相对较差.整体上来说,ABOA在收敛精度和稳定性上都有提升,特别是在单峰和多峰函数,其全局寻优能力明显较强.本文选取了4个函数的迭代进化图,来直观的展示函数的优化效果对比,可以看出ABOA算法在收敛精度及收敛速率上都占优,如图1~图4所示.

表4 测试结果

图1 F1迭代图
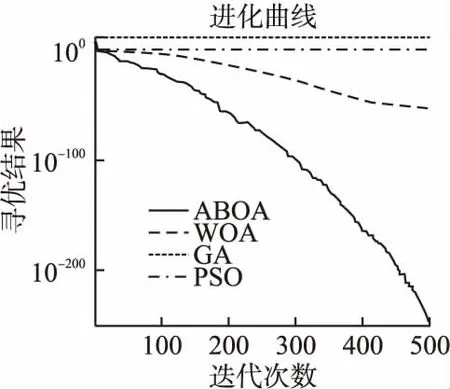
图2 F2迭代图

图3 F9迭代图
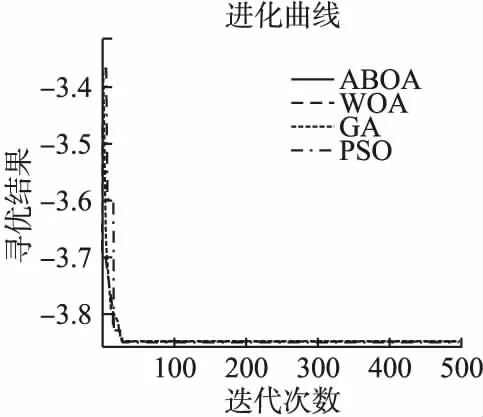
图4 F18迭代图
5 最小二乘支持向量机模型
最小二乘支持相机模型是对支持向量机的一种改进,通过把SVM不等式约束变为等式约束来降低求解二次规划问题时的计算难度,该模型算法在进行非线性问题求解方面十分有效,而短时交通流预测就是要在复杂的交通系统中进行非线性求解,因此本文选取LSSVM进行短时交通流预测,该模型对短时交通流进行预测的基本描述如下.给定训练样本数据集:
S={(xi,yi),xi∈Rn,yi∈R},i=1,2,…,l
(15)
式中:xi表示与交通预测模型的预测量密切相关的一些影响因素,如交通流量,道路占有率等,n表示输入数据的维数;yi为短时交通流预测的期望值;l为获取的历史样本个数.由于道路上的流量是根据时间序列变化的,所以当前的交通流量与前一段时间的交通流量存在着关联性.因此,前面一段时间的流量序列数据可以用来预测未来的交通流.通常把输入的交通参数xi与输出的交通流y二者的非线性关系转变成φ(x)与y之间的线性关系,非线性短时交通流预测的决策函数可以定义为:
f(x)=(ω,φ(x))+b
(16)
其中,φ(x)是LSSVM的核函数,可以将输入的历史流量数据映射到更高维的空间进行求解.b为偏差量,ω为权值向量.使用LSSVM的优化函数对目标函数值进行优化可转化为:
(17)
式中:ei表示真实值与预测值二者的拟合误差,γ为LSSVM模型的惩罚因子,用来控制误差的惩罚力度大小及调整模型复杂度,加上拉格朗日乘子αi并构造拉格朗日函数进行求解如下:
(18)
根据KKT条件得:
(19)
消去ω和ei,并且改写成矩阵形式为:
(20)
式中:K表示核函数矩阵;I表示相应维数的单位矩阵.通过LSSVM进行预测的函数形式如下:
(21)
式中:k(xi,xj)表示训练过程中的核函数,本文采用高斯(Gauss)径向基核函数,其函数形式如下:
K(xi,xj)=exp(-‖xi-xj‖/2δ2)
(22)
式中:其中δ为核函数带宽.在基于径向基函数的LSSVM预测模型中,参数δ决定了训练样本数据分布特性,而惩罚系数γ的值能影响训练数据的误差以及模型的泛化能力.在进行LSSVM交通流预测时,这两个参数的选取不当会导致预测模型过渡学习或者过拟合现象,因此有必要使用智能优化算法对δ和γ的取值进行选择优化从而提高模型的预测性能.
6 ABOA_LSSVM短时交通流预测模型的建立
6.1 算法的基本流程
第一步搜集交通流数据,对数据做预处理,再利用ABOA对LSSVM进行参数寻优得到优化后的短时交通流预测模型,最后依据最优模型,进行短时交通预测,并输出预测结果,具体步骤如图5所示.

图5 ABOA化LSSVM模型的流程框架图
6.2 算例仿真
为了验证提出的ABOA-LSSVM组合预测模型的有效性.选取云南省某高速5月7号-11号5天的实际交通流量数据(每10分钟一个),用历史数据补齐缺失数据,然后对获取的数据使用小波阈值降噪[18]减少异常数据对预测结果的干扰,将母小波函数ψ(x)进行变换生成一组基本小波函数:
(23)
式中a为缩放因子,b为平移因子.定义信号f(x)的连续小波变换为:
(24)
将处理后的数据采用前4天的流量作为训练样本集,最后一天的流量数据作为测试集进行,然后分别使用ABOA-LSSVM、WOA-、PSO-LSSVM、LSSVM这4种模型对流量数据进行预测,并与预测日的实际流量数据进行对比.文中种群大小为20,迭代次数为50代,ABOA的预测结果图如图6所示.

图6 ABOA优化LSSVM短时交通流预测值与实际值对比
6.3 预测结果对比
对于3种不同算法的预测结果,为了体现其有效性,本文通过使用采用均方误差(MSE)、平均绝对百分比误差(MAPE)这两个值作为评价指标,指标的表达式如下所示:
(25)
(26)
本文将不同模型计算的预测值和真实值的均方误差、平均绝对百分比误差结果放在表5中,由表5本文可以看出使用ABOA-LSSVM模型做短时交通流预测预测结果上整体优于其他几种模型,说明使用的ABOA-LSSVM模型在进行短时交通流预测是可行的.

表5 模型误差
7 结 论
本文提出了使用自适应权重和天牛须搜索的策略对鲸鱼优化算法进行了改进,在进行搜索捕食将鲸鱼个体看做天牛个体,使用天牛须搜索的策略避免了搜索捕食的随机性大大加快了前期的全局搜索速度,同时使用自适应权重策略使得算法后期的搜索精度.通过对18个标准测试函数的仿真实验可得改进后的算法在收敛精度,稳定性及收敛速度上相对于标准WOA、PSO、GA 3种算法均有着明显的优势,证明了改进策略的有效性.然后将改进后的算法结合LSSVM进行短时交通流预测,并与标准WOA,PSO优化LSSVM以及LSSVM短时交通流预测进行对比,结果表明改进后的算法在LSSVM短时交通流预测上的有效性.