一种活动发射平台轨道行走理想速度曲线设计
2021-08-23李道平杨之江刘丽媛许学雷
李道平,杨之江,刘丽媛,邢 然,许学雷
(北京航天发射技术研究所,北京,100076)
0 引 言
活动发射平台驱动控制系统是活动发射平台的重要组成部分,用于控制活动发射平台承载运载火箭按照特定的轨道和速度曲线实现技术厂房与发射工位间的垂直转运任务。某航天发射基地轨道为直线轨道,沿途设置2 处变轨道岔,见图1。活动发射平台需在直线轨道上在规定时间内安全、平稳、可靠地将运载火箭转运至发射工位。理想速度曲线设计是活动发射平台驱动控制系统设计的重要内容,开展活动发射平台轨道行走理想速度曲线设计、确保驱动控制系统顺利运行、实现平台顺利转运是工程研制的重点和难点。

图1 活动发射平台转运轨道Fig.1 The Transport Track of Mobile Launch Platform
围绕活动发射平台垂直转运过程,相关学者开展了大量研究。国外相关文献资料较少,主要围绕发射平台的转运方式开展描述,在速度曲线方面未见相关报道。文献[1]~[3]对国内外最早的活动发射平台做了简要介绍,对其主要速度指标进行定量描述;文献[4]给出了某运载型号活动发射平台驱动控制系统的主要组成及转运的主要指标要求;文献[5]对带有柔性机构活动发射平台转运差速行走的可行性进行了分析。文献[6]通过仿真给出了活动发射平台速度上限的要求,并通过试验测量了运行过程中的振动加速度值满足任务要求;文献[7]对活动发射平台在圆弧曲线上的速度控制开展了研究。针对活动发射平台的垂直转运流程,目前相关理想速度曲线设计方面工作尚未开展。速度曲线是活动发射平台驱动控制系统设计的重要内容,对活动发射平台的功能和性能有重要影响。以某运载型号活动发射平台为研究对象,围绕直线轨道运行、经过道岔、终点减速及定位的垂直转运全流程,开展活动发射平台轨道行走理想速度曲线设计,与试验结果对比分析,给出合理设计值,验证其合理性。
1 系统组成
活动发射平台驱动控制系统主要由上位机、控制面板、下位机、变频器和限位传感器等设备组成。上位机和控制面板将控制信号给定下位机,下位机利用Profibus-DP 总线控制变频器拖动电机运行。均匀分布于行走装置上的16台电机驱动行走装置轮组的运行实现活动发射平台的运行。系统通过限位传感器反馈电机的运行状态等信息,实现活动发射平台直线轨道行走、终点减速、精确定位和运行状态监控等功能。驱动控制系统原理如图2 所示。

图2 某活动发射平台驱动控制系统原理Fig.2 The Schematic of Drive Control System of Mobile Launch Platform
2 理想速度曲线设计
活动发射平台需要在有限的时间内完成运载火箭的垂直转运任务,最终定位精度范围要求±15 mm,转运过程中要保证上部运载火箭加速度不大于0.02g(g为重力加速度)。根据图1 所示的发射场轨道的布局,活动发射平台需完成出技术厂房、经过道岔I、经过长直轨道、经过道岔II、到达发射区减速停止。
2.1 总体设计
为保证有限时间3 h(不含因任务需要停止的时间)内完成运载火箭的垂直转运任务,根据轨道总长度约2800 m,活动发射平台平均速度应不低于约15.56 m/min。根据以往型号产品的设计经验,考虑空载返回工况,设计直线轨道最高速度30 m/min;为保证加减速过程正常,采用分段加减速设计,共设置4 m/min、10 m/min、15 m/min、20 m/min、25 m/min、30 m/min 6 个速度档,其中活动发射平台载有运载火箭时最大速度为25 m/min。
由于在道岔上轨道存在缝隙,为了避免活动发射平台经过缝隙时出现颠簸造成变频器出现过压或过流报警,初步设计经过道岔时速度降低为15 m/min;根据初步速度设计,由于活动发射平台大部分时间运行在最大速度25 m/min 的状态,所以如果不考虑加减速的时间,粗略估计转运时间时可以用轨道长度除以25 m/min 估算转场时间约为T=2800/25/60≈1.86 h。
2.2 理想速度曲线斜率设计
理想速度曲线斜率是活动发射平台加速与减速时的加速度,与活动发射平台的加减速时间成反比。加速时间是指变频器输出频率从零上升到最大频率所需时间,减速时间是指变频器输出频率从最大频率下降到零所需时间。加减速时间与活动发射平台运行的加速度成反比;为提高转场效率,降低转运时间,活动发射平台应尽量工作在最大速度25 m/min,即加速度应越大越好,加减速时间应越短越好,但是加减速时间受运载火箭加速度要求及活动发射平台和轨道限制。其次加速时间越短,容易导致变频器出现过流报警,而减速时间过短易发生变频器过压报警,因此需合理设计加减速时间。根据运载火箭转场时振动加速度不大于0.02g的要求,同时考虑活动发射平台的质量及变频器的能力及借鉴以往型号设计经验,初步设定加速时加速度为0.0125 m/s2≈0.0013g,减速时加速度为0.0083 m/s2≈0.00085g,既可以保证加减速过程的安全性也能保证转运的效率。
2.3 终点定位设计
为保证活动发射平台到位停止时定位准确,提升重复定位精度,采用2 次减速控制策略:在4~0 m/min之间增加1 个速度档位,该速度越低,活动发射平台重复定位精度越好,但是速度较低时,电机输入频率与输出频率呈非线性状态,为保证该速度下活动发射平台仍然能够稳定运行,该速度档位设定为0.8 m/min。实际使用时,活动发射平台安装终点停止限位传感器,轨道上安装对应的感应装置,终点停止限位传感器第1次触发时,将速度减速至0.8 m/min,终点停止限位传感器第2 次触发时,将速度减速至0 m/min。
2.4 理想速度曲线
由2.1 至2.3 节,绘制出活动发射平台由技术区到发射区和由发射区返回技术区的理想速度曲线见图3。

图3 理想速度曲线(技术厂房->发射工位)Fig 3 The Perfect Speed Curve(Testing Area ->Launch Area)
以由技术区到发射工位为例,在运行过程中,活动发射平台依次经历技术厂房启动,分段加速至15 m/min,经过道岔I,加速至25 m/min,经过长直轨道,分段减速至15 m/min,经过道岔II,到达发射工位,减速定位。活动发射平台由发射工位返回技术厂房过程同理,其中不运载火箭时速度最大可达30 m/min。
3 试验结果
为验证上述速度曲线设计的合理性,活动发射平台于某发射场开展行走试验。以技术区至发射区为例,运行过程中16 台电机的频率、电压和电流曲线如图4~6 所示,图4 中,由于采用开环V/F 控制,所以16 台电机频率一致,其中频率与活动发射平台速度成正比,46.88 Hz 对应25 m/min。
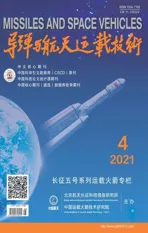
由图4 可知,除根据任务需要活动发射平台停止1 次外,实际活动发射平台运行过程中的频率曲线与图3理想速度曲线全程在图像走势和趋势上基本一致,在直线轨道时,各电机速度给定一致。由图5 可知,16 台电机电压平稳,无过电压和欠电压现象,由图5和图6 可知,电机压频比基本一致,运行状态良好。由图6 可知,整个转运过程中16 台电机电流平稳,虽然部分路段电流略有波动,但是仍处于正常运行的额定值(57 A)内,无过流现象。由图4~6 横坐标可知,转运时间约2 h 7 min,满足3 h 之内任务要求。
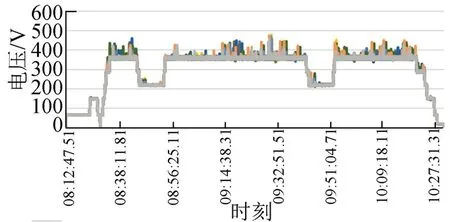
图5 电压曲线Fig.5 The Curve of Voltage
图6 电流曲线Fig.6 The Curve of Current
综上所述,活动发射平台按照理想速度曲线运行,电机运行正常,压频比基本一致,无过流和过载等风险,转运时间满足要求,能够顺利完成运载火箭的垂直转运任务,因此速度曲线设计合理可行。
4 结束语
为确保活动发射平台在转运轨道上完成运载火箭的垂直转运任务,为其理想速度曲线开展了技术设计,试验证明按照该速度曲线运行,可以实现活动发射平台在转运轨道上的行走,满足任务要求,有效地提高了活动发射平台的总体性能,顺利完成运载火箭的垂直转运任务。[1] 张福全.国外活动发射平台述评[J].导弹与航天运载技术,1996(2):49-59.