一种实时动态跟踪的对时方法
2021-08-13吴纳磊徐少雄张春豪贾海旭李英春
吴纳磊,徐少雄,张春豪,贾海旭,李英春
(石家庄科林电气股份有限公司,河北 石家庄 050000)
随着科学技术及经济的不断发展,不管是企业还是人民生活对电的需求有了进一步的提高,国家电网有限公司已经将停电时间作为考核标准。为了减少停电时间,迅速查找故障源,国家电网有限公司广泛应用了暂态录波型故障指示器,其具有安装方便,判断故障准确率高,用户使用方便等特点。最主要的特点是将线路发生故障时刻的三相波形录下来并上传至主站,供主站对故障进一步分析。这就要求三相波形的同步性要高,并且是越高越好。
暂态录波型故障指示器一般由1个汇集单元和3个采集单元构成。现场安装时汇集单元安装在电线杆上距地大约3 m,3个采集单元分别安装在10 kV的ABC三相线路上(可带电安装),汇集单元与主站之间通过GPRS通信,汇集单元和采集单元之间通过433 MHz的无线进行通信。上传给主站的录波数据是由ABC三相线路上的设备分别采样存储的,为了满足三相波形之间的同步性,就要保证三相的设备在同一时刻对线路电流电压进行采样,这就需要在整套故障指示器系统中设计一套精确稳定的时间系统。
输电线路上出现故障的时刻是不确定的,随时都可能发生,这就要求三相设备的时间系统必须长时间处于稳定状态。由于晶振本身的偏差会使得设备的时间系统随着时间的推移误差逐渐变大,如果通过频繁对时来解决这个问题,通信信道就没有能力传输业务数据,而433 MHz的信道数量有限,所以不能通过增加信道的方式来解决此问题。故提出了一种实时动态跟踪的对时方法来解决短时间内不对时还能够保证三相设备之间的对时精度。
1 对时方法
本文提出的实时动态跟踪的对时方法是基于主从结构的通信系统,如图1所示,主机通过GPRS信道接受主站下发的对时命令或者接受GPS的对时信号来保证本身的时间的准确性,通过发送广播对时命令的方式将时间下发到从机设备,一般的对时方式为从机接受到主机下发的对时命令后根据测得的传输时间进行简单的补偿直接对时给自身的时间系统,这样能够保证在对完时时时间系统是精准的,但经过时间的推移各个从设备之间的时间偏差会越来越大。基于实时动态跟踪的对时方法可以在短时间内避免这一问题,给业务数据的传输留了足够的时间。
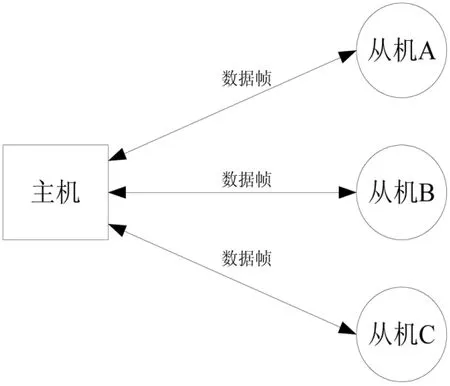
图1 主从结构的通信系统
主机设备与各个从机设备之间的通信方式采用分时复用的方式。如图2所示主机分别在时间点Tz0、Tz1、Tzn发送数据给从机设备,即主机每间隔T时间给从机发送一帧数据。
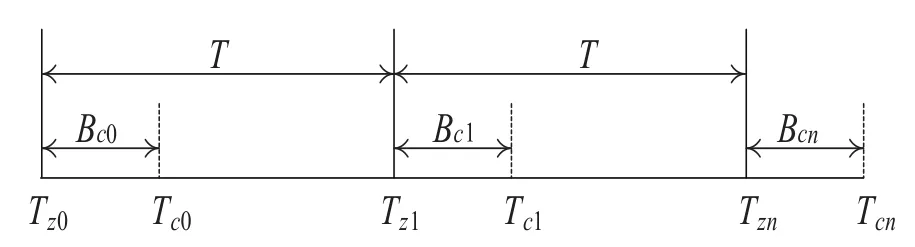
图2 主机给从机下发对时命令的时序图
图2中的T为主机设备发送数据给从机设备的周期;Tz0、Tz1、Tzn分别为主机设备发送数据的时刻;Tc0、Tc1、Tcn分别为从机设备收到数据的时刻;Bc0、Bc1、Bcn分别为数据的传输时间;
主机设备按照图2中的周期给从机设备下发对时命令,对时命令中带有时间戳,当有其他业务数据时就暂停下发对时命令,没有其他业务数据的时候下发对时命令,而从机在接受到对时命令以后进行以下步骤的处理:
A.接收到对时命令。
B.判断是否首次收到对时命令,如果是,将收到的当前时间戳作为系统时间写入本地,否则执行步骤。
C.如果距上次收到对时命令的时间超过T+ΔT,放弃本次对时命令,否则执行步骤D,其中ΔT为间隔ΔT间从机未接受到对时命令,还能保证从机时间精度的最大值。
D.计算当前收到的对时命令中的时间戳和上次收到对时命令中的时间戳之间的差t1,计算收到当前对时命令时和上次对时命令时的本地时间差t2,如果abs(t1-t2)>T1,放弃本次对时命令,T1为主机在两次对时的间隔时间内走过的时间与从机在两次对时的间隔时间内走过的时间允许的最大差值,否则执行下一步骤。
E.根据当前收到的对时命令中的时间戳和上次收到的对时命令中的时间戳Tz1和Tz0,计算出在此间隔内主机走过的时间Pz,Pz=Tz1-Tz0。
根据当前和上次收到对时命令时的本地时刻Tc1和Tc0,计算出在此间隔内从设备走过的时间Pc,Pc=Tz1-Tz0。执行步骤F。
F.本地的晶振频率为Fclock,经过PZ晶振震荡次数为PC/(1/Fclock),设置本地计数器,使之后晶振震动次数为PC/(1/Fclock)时,经过的时间为Pz。
计算:时间差ΔT=PC-Pz;调整量A= Δt。
进一步地:步骤E中,计算:Δkn=Δt+An-1,其中:An=aΔkn+(1-a)An-1。式中:n为一共收到连续对时命令的数量;Δkn为本次调整量的中间值;Ai为连续第i次收到对时命令后的调整量,1≤i≤n,A1=0,A2=Δt2;a为调整系数。
调整量A=An步骤F中,具体执行的步骤包括:
每ms调整1次晶振震荡作为调整的基础值,计算在T时间内,以基础值为基准,可以调整的总时间为:Tp=T×1/Fclock,T的单位为ms。
计算在T时间内完成调整量的调整,每ms需要调整的晶振震荡次数:T0=A/Tp,A/Tp代表取整。
计算将T0分配到每ms后,剩余的需要调整的时间:T1=A%Tp,A%TV代表取余数。
如果T1≠0,计算调整范围:Tv=T1/(1/Fclock)。
设置计数器:在前TT内,每ms的计数为:当前计数+Tv+an,之后的每ms的计数为:当前计数Tv,其中,如果Av>0,an=1,否则,an=-1。
MCU使用计数器完成定时功能,晶振参数及定时器的工作频率确定后,每个时间单位的晶振震荡次数是一定的。如定时器的工作频率为12 MHz,定时器的TOP值设为(12000-1),也就是说定时器的计数器从0计数到TOP值时所经过的时间是1 ms。
本方法依据绝对的时间参考,将定时器中的计数作为一个变量进行调整,可以精细调整本地时钟精度。
采用本文提出的方案,根据收到的对时命令中的时间戳作为参考,调整一定时间内的晶振震荡计数,精细调整本地时钟与主机同步,实现多个从设备的时钟同步,从设备之间的时间差在±2μs内。
2 暂态录波型故障指示器
以上介绍的实时动态跟踪的对时方法应用到暂态录波型故障指示器中以满足三相录波数据的同步性。本文提出的实时动态跟踪的对时方法主要是在采集单元中实现,采集单元系统的结构图如图3所示。
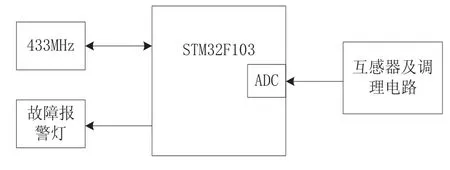
图3 采集单元采样结构图
当采集单元接受到汇集单元的对时帧并进行跟踪对时后,可以认为三相采集单元中的时钟系统是精准的,即三相设备的ms沿中对齐的。采集单元的主频为12 MHz,启动AD转换的定时器的时钟频率也是12 MHz,每周波采样100个点,即启动AD转换的定时器的周期值就为2400。在每ms沿到来的时候将AD转换定时器的当前计数器的值归零,重新计数。经过测试三相设备的定时器值在间隔1 ms时的偏差是很小的完全满足应用。这样就能够满足三相采集单元录波数据的同步性。
3 测试及结果分析
使用继电保护测试仪输出状态序列,模拟现场的接地故障,如图4为模拟的A相接地故障的状态序列。
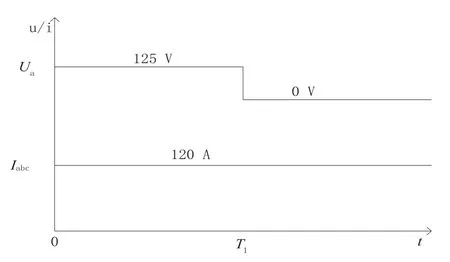
图4 A相接地故障的状态序列图
图中Iabc为ABC相正常负荷电流120 A,Ua为A相电压,T1为A相发送接地故障的时刻,故障指示器在检测到该序列时就会将接地时刻的波形存储下来并上传到主站,在PC机上使用查看comtrade文件格式波形软件,查看上传的波形如图5所示。
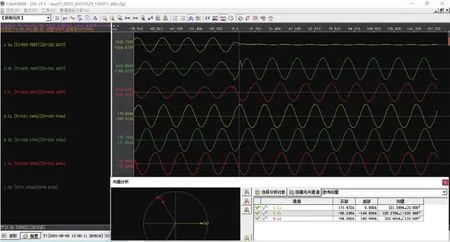
图5 A相接地故障波形
从图5中可以看出,三相录波数据之间的角差为0.3°左右,折算为时间约16μs,为主站对接地故障波形的分析提供了扎实的基础数据,从而提高故障判断的准确率。
4 结束语
本文设计的实时动态跟踪的对时方法应用于暂态录波型故障指示器中,不仅提高了整个产品的对时系统的精度,还促使产品可以更加长久稳定的运行,并且为在主站分析波形判断线路故障提供了可靠有效地波形数据,提高了故障判断的准确性。
