基于模糊PID 的桑蚕养殖物联网管理系统设计
2021-08-02吴亘杰王成群寇东来
吴亘杰,王成群,李 亮,寇东来
(1.浙江理工大学信息学院,浙江 杭州 310018;2.浙江海利普电子科技有限公司,浙江嘉兴 314300)
0 引言
长期以来,我国桑蚕养殖主要以人工养殖为主,蚕房的温湿度环境极大程度上取决于农户自身经验,存在着劳动力成本高、效率低、管理水平差异大、专业知识水平要求高等一系列问题。在控制系统中,绝大多数控制对象不同程度上存在时滞性,而在温度控制系统中时滞现象更为常见,大时滞一直是控制系统需要处理的重大难题[1]。温湿度变化对桑蚕生长影响极大,大空间蚕房的时滞问题更为突出。由于桑蚕养殖占地面积广,所处环境较复杂,再加上南方气候变幻无常,因此蚕房环境是一个大滞后、大惯性、非线性、时变性的被控对象,时滞问题难以避免,很难建立一个准确的数学模型[2]。模糊控制适用于非线性及多干扰系统,对没有精确数学模型的系统可以达到较为优秀的控制效果[3-4]。
很多学者针对大时滞温度控制系统相关问题进行了研究。盛平等[5]设计的基于模糊PID 控制器的叶菜温室测控系统,将模糊PID 控制应用于实际叶菜温室场景中,提高了系统的自适应性和灵活性;魏雨飞[6]设计的农作物温室温度控制系统,将模糊PID 思想应用于大时滞温控系统中,但在仿真实验中没有建立数学模型;Wu 等[7]设计的基于自适应模糊PID 的环境实验室温度控制系统和赵慧敏等[8]设计的阳光温室控制系统,都针对时滞问题建立了数学模型,并进行MATLAB 仿真验证,但是在实际环境中没有测试验证;舒大松等[9]设计的自适应模糊PID 仓储温度控制系统采用了模糊PID 控制,但是隶属度函数只采用了三角形,在模糊控制稳定性方面有所欠缺;Najmurrokhman 等[10]根据平菇的最佳生长环境需求设计了基于模糊PID 的平菇栽培温湿度控制系统,系统响应快且控制效果良好。
针对蚕房温湿度由于局部控制引起的时滞问题,不论是单一的隶属度函数还是传统的PID 方法都存在一定的缺陷,本文提出一种综合PID 控制和模糊控制两者优点的控制方案。该方案基于上位机专家数据库,下位机采集蚕房的温湿度参数为输入变量,以温湿度控制量为输出变量自适应调节系数,通过控制设备进行相应的温湿度控制,以达到蚕房最优化的控制效果,实现高效智能化管理。
1 总体方案
蚕房结构如图1 所示。实际蚕房空间约25m2,蚕房内热风机、加湿器和空调的安置位置决定了蚕房的温湿度控制是由局部调节温湿度来控制整体温湿度变化,导致控制过程存在大时滞性和复杂性。
桑蚕养殖物联网管理系统主要根据桑蚕的生长阶段,通过上位机专家数据库查询蚕房对应的最佳温湿度参考值来设定蚕房温湿度。系统核心是嵌入式网关,每间蚕房内安装有4 个均匀分布的温湿度检测点,网关通过RS485串口通信采集蚕房内温湿度传感器实时数据,并将数据上传至云服务器存储到数据库中,环境数据经模糊控制器处理,根据实际情况和用户设置自动调控热风机、空调和加湿器等运行时间。当蚕房调控遇到冲突时,温度调控优于湿度调控,以达到最优的蚕房环境。
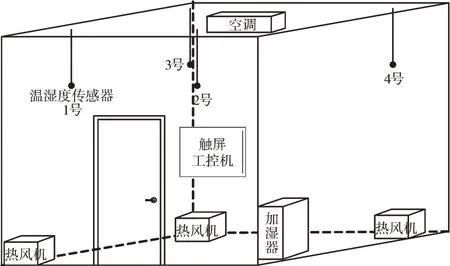
Fig.1 Schematic diagram of silkworm house图1 蚕房结构
对不同的系统功能域进行拆分和优化,形成桑蚕养殖物联网管理系统体系架构,如图2 所示。用户域主要是桑蚕养殖管理人员;应用域主要实现数据库、上位机软件以及智能处理平台设计,对来自下位机的数据进行接收、存储、分析和处理,实时响应用户的数据查询和设备控制等需求,并将异常情况对用户进行反馈;运维管控域主要实现可视化服务平台,保障系统的稳定性以及对控制设备进行维护;感知域实现蚕房内温湿度采集、蚕房调控设备控制以及用于数据传输的下位机系统设计。下位机主要由感知终端、控制终端以及传输终端3 部分组成,桑蚕养殖管理人员可以通过触屏工控机和移动端对相应蚕房进行实时数据查询、设备控制以及参数设定等;目标对象域主要实现以蚕房为被控对象的桑蚕养殖物联网管理系统控制平台搭建。
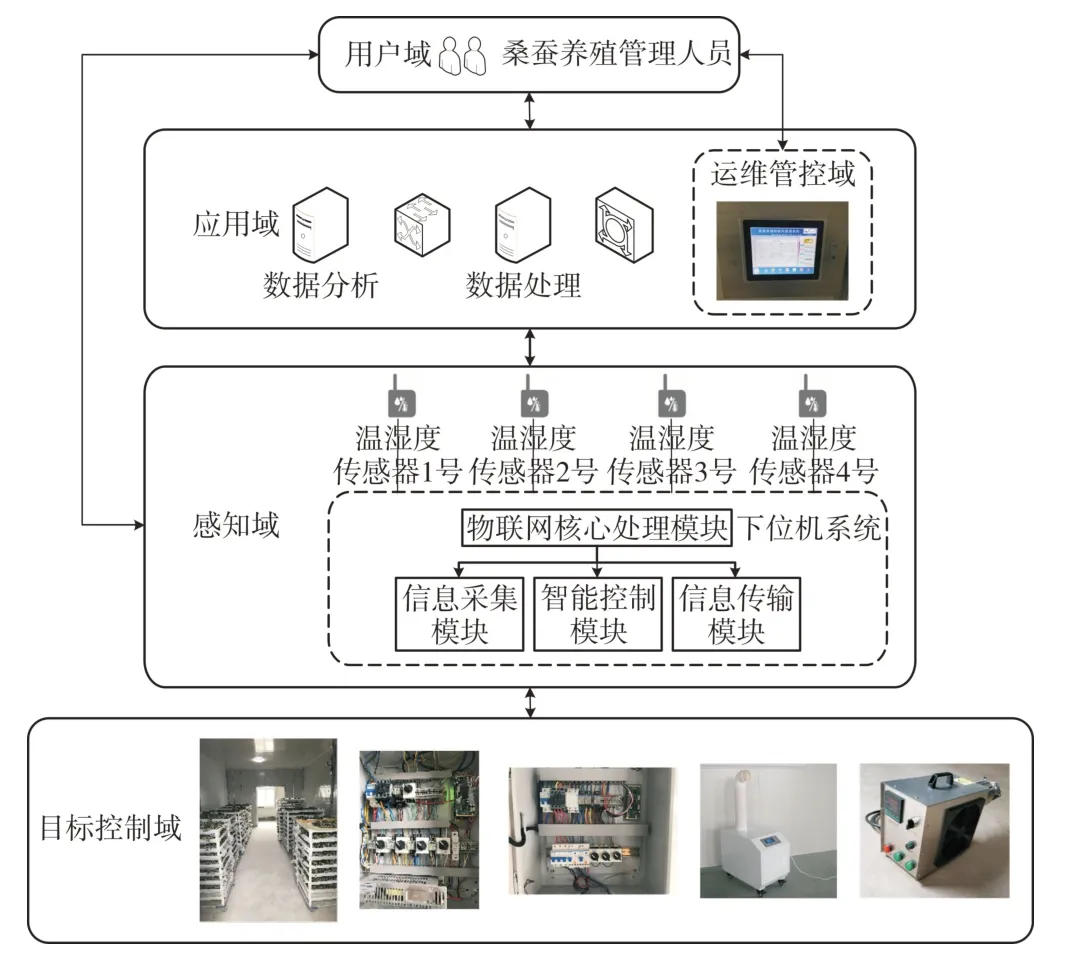
Fig.2 IoT system architecture diagram图2 物联网体系架构
2 模糊PID 控制原理
PID 控制是一种基于过程参数的控制算法,利用反馈来检测偏差信号,并通过偏差信号控制被控量,而控制器本身就是比例、积分、微分3 个环节的加和[11]。本系统基于PID 控制算法结合模糊控制思想实现蚕房温湿度的自适应调节,其控制表达如下:

式(1)中:u(t)为t 时刻系统输出的控制量;Kp为比例系数;Ki为积分系数;Kd为微分系数;控制器输入e(t)为设定温度值r(t)与蚕房温度实际值y(t)之间的误差,表示为e(t)=r(t)-y(t);偏差变化率ec(t)为当前时刻偏差值与上一时刻偏差值之差,表示为ec(t)=e(t)-e(t-1)。
由于蚕房温湿度控制具有时滞性和大惯性特点,考虑到受控对象的多干扰性和桑蚕对温湿度变化的敏感性,传统的PID 方法无法满足蚕房温湿度的精确控制要求。为满足不同阶段桑蚕的最佳温湿度需求,本系统结合模糊PID控制思想对传统PID 算法进行改进,设计PID 系数自适应算法,利用农户以往成功的调节实践经验建立专家数据库,充分发挥模糊PID 控制器的优良控制效果。图3 是系统的模糊PID 控制结构。
系统以上位机专家数据库中的温度为依据,将蚕房采集到的温度偏差e 和温度偏差变化率ec作为模糊控制器输入,在模糊量化处理基础上结合模糊控制规则进行模糊推理,得出3 个参数的模糊度,最后对照模糊论域进行清晰化处理得出具体数值。模糊控制器的输出为PID 控制器参数变化量△Kp,△Ki,△Kd,可以根据蚕房实际状态对系统PID原来设计的初始参数进行修正[12-14],计算出控制蚕房相关执行器的变量,由变量推导出控制组合。
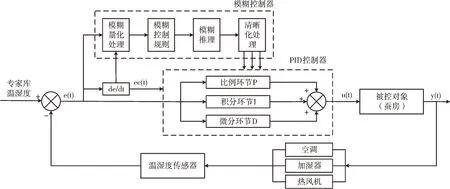
Fig.3 Fuzzy PID control structure diagram图3 模糊PID 控制结构
综合分析蚕桑养殖物联网管理系统后,得出温度偏差e 的论域为[-3,3],温度偏差变化率ec的论域为[-3,3]。采用“PB(正大)”“PM(正中)”“PS(正小)”“ZO(零)”“NS(负小)”“NM(负中)”“NB(负大)”7 个模糊子集涵盖蚕房内温度偏差e 和温度偏差变化率ec。根据实际经验并考虑控制的稳定性需求,本文选用三角形隶属度函数,NB 和PB选用Z 型和S 型隶属函数,如图4 所示。
根据系统模糊控制输入量温度偏差e 和温度偏差变化率ec特点,在桑蚕养殖理论知识和实践经验基础上建立PID 参数调整规则表,如表1 所示。当偏差e 绝对值较小时,选择较大的Kp和Ki来保证系统稳定性,选择适当的Kd提高系统的抗干扰能力;当偏差e 绝对值中等时,选择较小的Kp和适当的Ki,Kd,通过降低超调量来保证系统的响应速率;当偏差e 绝对值较大时,选择较大的Kp保证蚕房响应效果,选择较小的Kd来避免出现过饱和现象。同时为了避免系统超调,对积分作用部分进行限制[15-16]。模糊规则采用“if A and B then C”的条件语句实现。
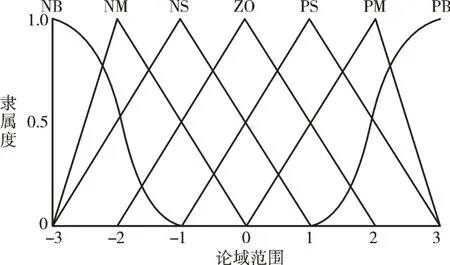
Fig.4 Membership function图4 隶属度函数
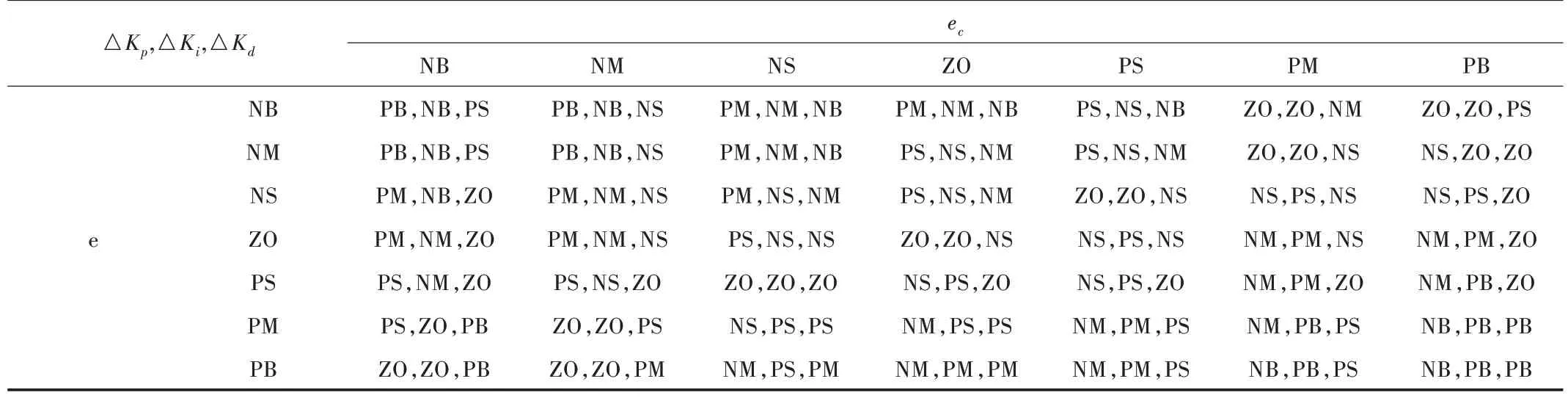
Table 1 Fuzzy control rule表1 模糊控制规则
由于蚕桑养殖物联网管理系统的被控对象蚕房具有时滞性和大惯性等特性,系统近似于一阶惯性纯滞后模型,其传递函数可以用一阶惯性环节与纯延迟环节的串联形式进行描述[17]。可表示为:

式(2)中,K 为蚕房的静态增益系数,即系统达到稳态时系统输出与系统输入的比值,它只与被控对象有关,是表示被控对象稳定的标志。K 值越大稳定性越差,K 值越小稳定性越好。T 为蚕房的惯性时间常数,反映了加入输入信号后输出变量从初始状态到稳态的变化程度和被控对象动态过程的快慢特性。τ为蚕房的时滞时间系数。
采用飞升曲线测量法[18]确定控制对象的数学模型,将测得的蚕房温度时间数据拟合得到系统开环响应曲线。在曲线变化最快处作切线,求得与时间轴交点以及与渐近线交点,得出系统惯性时间常数T 为290s,滞后时间τ为20s。根据热风机和控制温度之间的对应关系进行参数识别,可以得到系统静态增益系数K 为0.7。
最终系统传递函数为:

3 结果评估
蚕房内温度调节为大时滞系统,本文对文中所提出的温湿度控制模型进行仿真,仿真实验基于MATLAB/Simu⁃link 平台,将常规PID 控制与模糊自适应PID 控制算法进行对比。实验包括时滞环节的仿真,初始温度20℃,设定控制温度为25℃,仿真结果如图5 所示。图5 仿真实验表明,常规PID 算法和模糊自适应PID 控制算法都能实现温度控制,但模糊自适应PID 控制算法在系统控制性能上明显优于常规PID 算法。模糊PID 控制算法不仅响应速率更快,超调量更小,可靠性和稳定性更强,而且可以实现PID 参数的最优调整,更好地处理蚕房因不确定环境参数变化带来的影响。
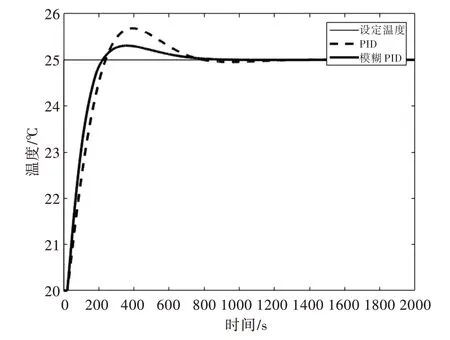
Fig.5 Comparison of simulation results between fuzzy PID and conventional PID图5 模糊PID 与常规PID 仿真效果对比
为了验证蚕桑养殖物联网管理系统运行效果,随机对某天的一间蚕房进行现场测试,设定蚕房温度值为25℃,温度误差为±1℃,湿度值为85%RH,湿度误差为±5%,测试时间为9:00-16:00,数据采集间隔为30min,得到的实验结果与预期相符,蚕房实际温湿度控制情况如图6、图7 所示。由图6、图7 可知,在设定温度和湿度及误差后,蚕房内温度和湿度在不同时间段会有所起伏,温度始终保持在24~26℃范围内,湿度始终保持在80%~90%RH 范围内。数据显示系统运行正常且响应及时,没有出现超出设定范围的报警,实现了蚕房温湿度的自适应控制。
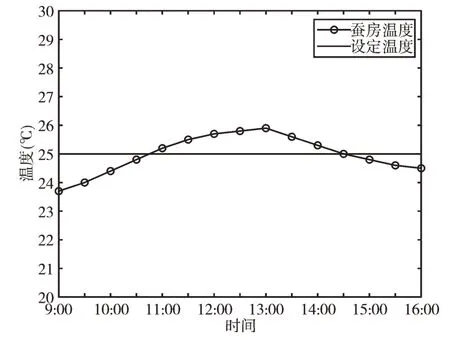
Fig.6 Temperature change graph图6 蚕房温度变化曲线
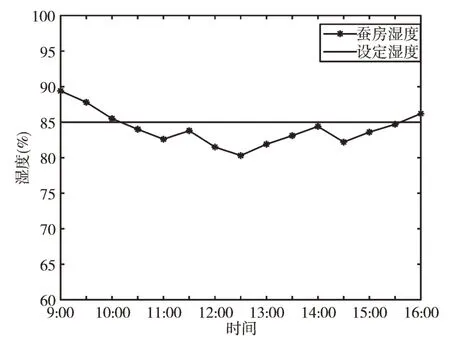
Fig.7 Humidity change graph图7 蚕房湿度变化曲线
4 结语
针对蚕房温湿度控制存在的大滞后、大惯性、非线性、时变性等问题,研究蚕房内温湿度变化规律,设计了一种根据蚕房环境因素变化有效调整的模糊控制方法。长期实地测试和观察表明,本文设计的蚕桑养殖物联网管理系统具有实用性和可靠性,具有良好稳定的控制效果和很强的鲁棒性,可以及时处理因人工或环境因素对桑蚕养殖造成的不利影响,弥补了常规PID 温度控制系统在高控制要求和多干扰情况下鲁棒性不足问题。蚕桑养殖物联网管理系统可以达到传统人工养殖效果,极大程度上降低劳动力成本,满足农户智能化监测和管理需求,具有较好的实用性和应用价值。
