基于工业摄影测量的架桥机精确落梁监控系统研究
2021-07-27安志刚
安志刚
(中铁第五勘察设计院集团有限公司 北京 102600)
1 引言
我国高速铁路预应力混凝土简支箱梁绝大部分都是采用梁场预制的24 m、32 m、40 m预应力混凝土简支箱梁,并通过架桥机进行现场架设的形式施工。架桥机根据运架形式分为运架分体机和运架一体机。本研究主要针对运架分体机进行的。
当前运架分体机架梁方式分为以下几个步骤:(1)在架设完上一片梁后,架桥机移动到下一孔并就位,运梁车回梁场运送下一片梁至现场。(2)进行喂梁,将待架梁纵向移动至待架孔正上方,然后进行对位。(3)进行落梁,当梁底距离千斤顶面200 mm时,进行线路纵横向的精确对位。在喂梁、落梁、精确对位的过程中,每个步骤均需要人员通过人工用尺子测量梁体的位置信息,并将相关信息报送给架桥机操作人员。整个喂梁落梁过程耗时时间长,监控人员和操作人员交互连通频繁,需要配合人员多,架梁效率不高,落梁精确度难以保证,同时,多个人员分布于梁体上下前后进行人工观测,存在安全隐患。本文研究了一种架桥机精确落梁监控系统,减少对落梁过程中操作人员的要求,提高落梁效率和落梁质量。
2 架桥机落梁技术要求
传统落梁过程如下:
(1)架梁作业之前,复核墩台里程、垫石十字线、垫石高程,并测量支座螺栓孔深度及偏移等,确认各个参数满足设计要求,保证简支箱梁顺利架设,符合架设精度要求。
(2)落梁过程中(见图1),由1名技术人员负责指挥,若干工人配合,司机负责架桥机具体操作。箱梁落梁过程中,配合工人密切关注箱梁的前后端,保证箱梁与已架箱梁及前支腿之间的距离,避免出现碰撞。同时,对吊具水平度进行监视(目测),当水平度不满足要求时必须进行调节。当箱梁下落至底面距离垫石顶20~30 cm时停止落梁,此时,通过操作,对箱梁水平度、前后左右位置进行粗调,粗调完成后继续落梁。当箱梁底面离垫石顶5 cm时停止,然后进行箱梁位置的精调对中,精确调整梁体前后左右位置,使其达到精度要求。精调完成后继续缓慢落梁至设计高程。

图1 落梁过程照片
(3)精调对中方法:在桥墩垫石上标出十字线,同样在箱梁两侧底部标出十字线,通过人站在箱梁底部,肉眼观测,使得箱梁十字丝和垫石十字丝重合,从而达到精确对中。
根据相关规范要求,落梁质量要求如表1[1]所示。
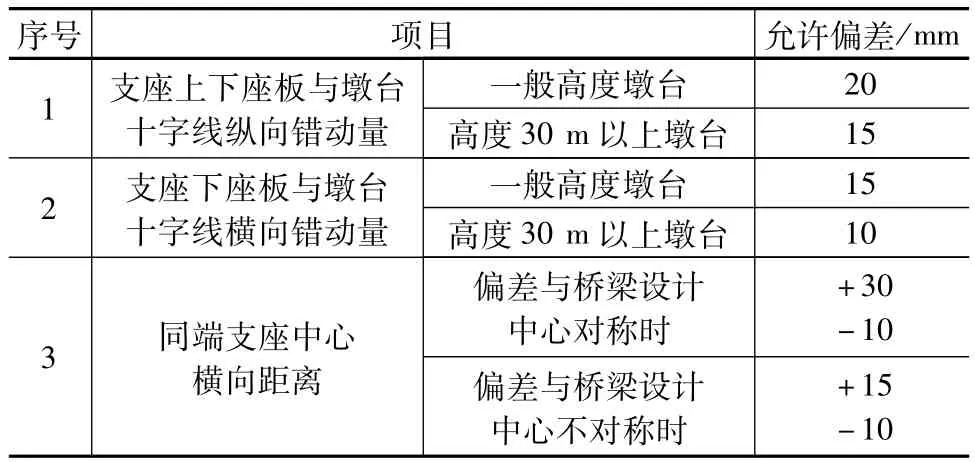
表1 双线整孔箱梁就位允许偏差
3 自动精确落梁解决办法概述
自动精确落梁解决办法的核心是解决箱梁中线和里程位置识别,以及垫石中心识别。
根据对中原理,我们可以划分为以下两种方法:
(1)整体坐标法
整体坐标法的概念就是通过定位出箱梁的空间绝对坐标,和线路坐标系统一,知道垫石的设计施工坐标,我们只需要测量出箱梁两端的中心某一点的坐标,直接进行坐标匹配,控制对中精度。
(2)相对位置法
相对位置法的概念和目前人工对中的方法类似,抛开空间绝对坐标,通过识别出垫石的中心位置和箱梁的中心位置,落梁过程中控制两个中心位置的距离差值,控制对中精度。
根据落梁中实时监测传感器的布置形式,我们又可以分为以下两种方法:
(1)一体系统
一体系统的概念就是监测判定距离偏差的监测系统和控制系统均在架桥机上。落梁过程中,由架桥机自身实时监测位置,并做出控制命令。
(2)分体系统
分体系统即是我们采用的监测传感器和架桥机分开,监测系统采集数据后通过无线传输发送给架桥机。
根据落梁中实时监测手段类别又可分为:卫星定位法、全站仪测量法、摄影测量法[2-3]。
综合考虑应用的实用性、便捷性、精确性,在此我们选择对基于工业摄影测量的架桥机精确落梁监控系统进行了设计研究。
4 基于工业摄影测量的架桥机精确落梁监控系统设计
4.1 设计思路
本方案的基本思路是在架桥机上安装工业摄影测量相机[4-6],并在摄影测量相机可测量范围内的支座垫石中心、已架箱梁及待架箱梁顶面、架桥机支腿的特征点位置布置工业摄影测量相机配合反射光信号的测量标志。
在喂梁过程中,待架箱梁对垫石中心遮挡前,测量出墩顶垫石中心与已架箱梁顶面、墩顶垫石中心与架桥机支腿上测量标志之间的相对空间位置关系,并存储至数据处理终端。待喂梁到位开始落梁时,垫石中心被待架箱梁遮挡,此时,直接测量待架箱梁特征位置测量标志与已架箱梁顶面、架桥机支腿上测量标志之间的相对空间位置关系,并调用已经存储的墩顶垫石中心与已架箱梁顶面、墩顶垫石中心与架桥机支腿上测量标志之间的相对空间位置关系,通过坐标转换计算,得到待架箱梁特征位置测量标志和墩顶垫石中心的相对位置,从而得到待架箱梁的偏差情况,为落梁控制提供数据支撑。
4.2 基本原理
4.2.1 摄影测量基本原理
摄影测量原理如图2所示,通过两台以上高分辨率的相机对被测物拍摄(或一台相机移动多个位置拍摄),得到被拍摄物体从多个(2个以上)角度拍摄的照片,通过对照片进行图像识别及计算分析后得到所拍摄物体精确的空间XYZ坐标[7-9]。所摄平面照片图像在像平面坐标系中是二维坐标值,但是通过利用摄影焦距参数可以将像点坐标转换成目标点的多个角度下(两个角度以上)的观测值,采用光束法平差技术,通过设置于不同角度的摄影相机同时对多个目标进行测量,得到多余观测量,进而计算出不同摄影相机之间的空间三维位置关系以及被测物的相对空间XYZ标。架设被测物目标点Pi由j个摄影相机拍摄(j条光线相交)(见图2),则共有j个共线方程,如式(1)所示。


图2 摄影测量基本原理
4.2.2 坐标原理
两个右手空间直角坐标系进行转换时,一般存在三个平移量、三个旋转量和一个尺度因子[10]。仪器所构成的测量坐标系O-XYZ先缩放k倍,再旋转(εx,εy,εz),最后平移(X0,Y0,Z0)后,转换到被测量坐标系o-xyz中。点P在O-XYZ中的坐标为(X,Y,Z),在o-xyz中的坐标为(x,y,z),则有:

同理也有:

式中,R为旋转矩阵,绕X、Y、Z测量坐标轴的旋转矩阵分别表示为:

旋转矩阵的构造按Kardan旋转进行,其要点是三个连动的旋转轴中不出现同名轴。首先绕X轴旋转x,此时Z轴到达OYZ与OYX两面的交线位置;其次绕旋转后的Y轴旋转y,使Z轴最终到达z轴;最后绕z轴旋转z,最终使X、Y轴分别与x、y轴重合。则旋转矩阵R为:
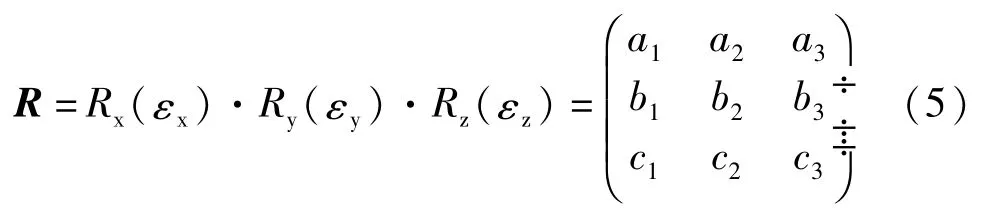
式中,R矩阵的诸参数为:
4.3 设计方案
4.3.1 系统组成
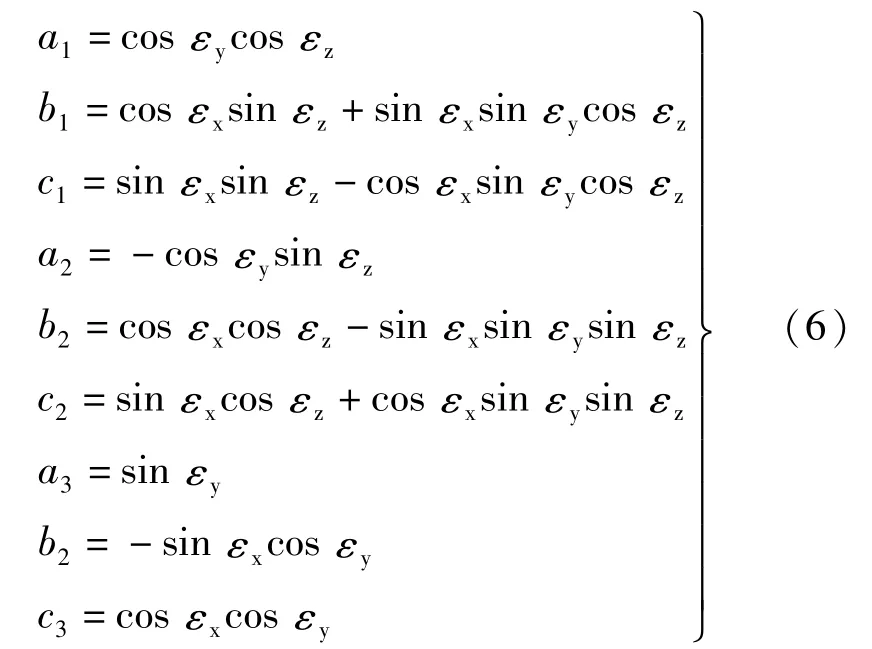
如图3~图5所示,基于工业摄影测量的架桥机精确落梁监控系统由工业摄影测量相机[11-12](6)和(7),测量标志(8)、(9)、(10)、(11)、(12)、(13),数据采集终端,监测平台以及显示屏几部分组成。
图3 系统组成示意a
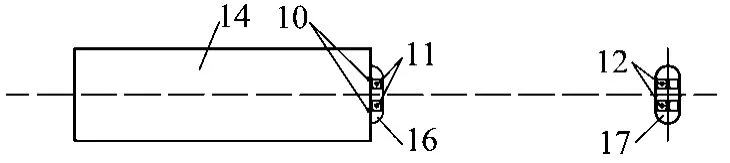
图4 系统组成示意b
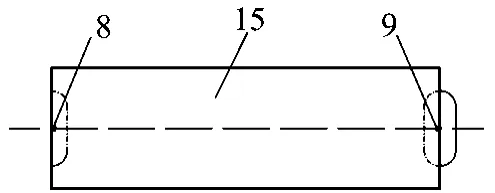
图5 系统组成示意c
其中测量标志包括布置于架桥机前支腿3表面的测量标志(13),以及设置于待架梁对应桥墩(16)上方支座垫石中心的测量标志(11),设置于待架梁对应桥墩(17)上方支座垫石中心的测量标志(12),以及设置于已架梁(14)前端顶面边缘,沿边缘横向布置的2个测量标志(10),以及设置于待架梁(15)前端顶面边缘中心的测量标志(9)和后端顶面边缘中心的测量标志(8)。
其中工业摄影测量相机和数据采集终端、数据采集终端同监测平台均通过有线方式进行通讯连接。
4.3.2 系统运行流程设计
基于工业摄影测量相机的架桥机落梁偏位监测装置和方法,运行流程设计如图6所示。
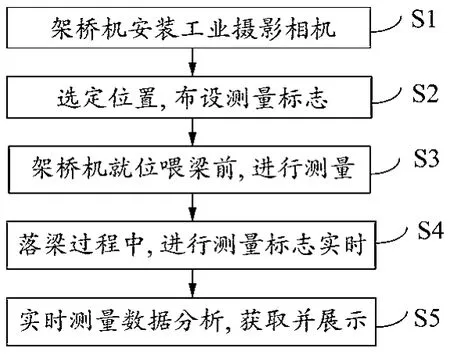
图6 系统运行流程设计示意
具体实施步骤如下:
步骤S1:在架桥机选定位置固定安装工业摄影测量相机(6)和(7),并调整角度,以使所述工业摄影测量相机(6)的测量范围,在落梁前包括测量标志(10)和(11),在落梁过程中包括测量标志(10)和(8);以使所述工业摄影测量相机(7)的测量范围,在落梁前包括测量标志(12)和(13),在落梁过程中包括测量标志(9)和(13)。
步骤S2:在架桥机前方腿(3)上布设测量标志(13),每个支腿立柱各布置1个,并调整布设位置,以使所述测点在落梁过程中,避开所架梁体的遮挡。架桥机就位后,设置待架梁对应桥墩(16)上方支座垫石中心的测量标志(11),以及设置待架梁对应桥墩(17)上方支座垫石中心的测量标志(12),以及设置已架梁(14)前端顶面边缘沿横向布置的2个测量标志(10)。在待架梁对应的前方两个支座垫石中心,以及后方两个支座垫石中心,各布设1个测量标志;在已架梁前段顶面边缘,沿边缘横向布置2个测量标志。
步骤S3:架桥机就位,喂梁前,工业摄影测量相机(7)拍摄架桥机前支腿(3)上布设的测量标志(13)和待架梁对应桥墩(17)上方支座垫石中心的测量标志(12);工业摄影测量相机(6)拍摄已架梁(14)前端顶面边缘沿横向布置的2个测量标志(10)和待架梁对应桥墩(16)上方支座垫石中心的测量标志(11)。
工业摄影测量相机(7)的拍摄数据经过数据采集终端处理并传输至监测平台,分析处理,以待架梁对应桥墩(17)上方支座垫石中心的测量标志(12)的两个测量标志相对位置关系建立空间坐标系XYZ-1,并计算得到架桥机前方腿(3)的两个测量标志在空间坐标系XYZ-1中的三维坐标值。
工业摄影测量相机(6)的拍摄数据经过数据采集终端处理并传输至监测平台,分析处理,以待架梁对应桥墩(16)上方支座垫石中心的测量标志(11)的两个测量标志相对位置关系建立空间坐标系XYZ-2,并计算得到已架梁(14)前端顶面边缘沿横向布置的2个测量标志(10)在空间坐标系XYZ-2中的三维坐标值。
步骤S4:喂梁到位后以及落梁过程中,工业摄影测量相机(7)实时拍摄架桥机前方腿(3)上布设的测量标志(13)和待架梁(15)前端顶面边缘中心的测量标志(9);工业摄影测量相机(6)拍摄已架梁(14)前端顶面边缘沿横向布置的2个测量标志(10)和待架梁(15)后端顶面边缘中心的测量标志(8)。
工业摄影测量相机(7)的拍摄数据经过数据采集终端处理并传输至监测平台,分析处理,以架桥机前方腿(3)上布设的测量标志(13)的两个测量标志相对位置关系建立空间坐标系XYZ-1′,并计算得到待架梁(15)前端顶面边缘中心的测量标志(9)在空间坐标系XYZ-1′中的三维坐标值;依据S4中测量分析结果,对空间坐标系XYZ-1′进行转换,得到待架梁(15)前端顶面边缘中心的测量标志(9)在空间坐标系XYZ-1中的空间坐标值。
工业摄影测量相机(6)的拍摄数据经过数据采集终端处理并传输至监测平台,分析处理,以已架梁(14)前端顶面边缘沿横向布置的2个测量标志(10)相对位置关系建立空间坐标系XYZ-2′,并计算得到待架梁(15)后端顶面边缘中心的测量标志(8)在空间坐标系XYZ-2′中的三维坐标值;依据S4中测量分析结果,对空间坐标系XYZ-2′进行转换,得到待架梁(15)前端顶面边缘中心的测量标志(8)在空间坐标系XYZ-2中的空间坐标值。
步骤S5:落梁过程中,在S4中得到的待架梁(15)前端顶面边缘中心的测量标志(9)在空间坐标系XYZ-1中的空间坐标值,待架梁(15)前端顶面边缘中心的测量标志(8)在空间坐标系XYZ-2中的空间坐标值,与落梁最终的理论设计位置进行对比分析,即得到落梁过程中待架梁的实时位置偏差。实时位置偏差分析结果通过显示屏通过数字和图像形式直观展示给架桥机操作员,辅助其精确架梁。
5 结束语
本文采用基于工业摄影测量技术的方法,通过对架桥机落梁过程中各个特征点连续监测,坐标转换计算,实现了架桥机落梁过程中偏位状态的自动监控。该方法的不足之处在于工业摄影测量需要设置专门的测量标志,整个落梁监控系统仍然需要人工参与,为了完善架桥机的自动架梁技术,下一步将围绕如何进一步减少人工参与,实现完全的自动化问题展开研究。
