一种新型髋离断外动力假肢的设计方法*
2021-07-23罗胜利喻洪流孟巧玲倪伟李新伟
罗胜利,喻洪流,△,孟巧玲,倪伟,李新伟
(1.上海理工大学康复工程与技术研究所,上海 200093;2.上海康复器械工程技术研究中心,上海 200093;3.民政部神经功能信息与康复工程重点实验室,上海 200093)
1 引 言
髋关节部位截肢常因恶性肿瘤、无法治疗性贫血以及爆发性感染疾病造成,占全部截肢人数的2.2%,死亡率超过50%[1-2]。此外,交通事故、中风以及低概率发生的战争等情况也可能会导致髋关节部位截肢[3]。
研究发现,佩戴髋离断假肢的患者在平衡力及体力足够时,仍需消耗正常人行走所需能量的两倍[4-5]。此外,大部分髋部截肢(见图1)患者在使用髋离断假肢过程中无法控制其站立相和摆动相的稳定,严重影响患者的生活质量。因此,大多数患者常使用轮椅、拐杖等助行器以代替髋离断假肢[6-8],而该方式存在压疮风险,也极易对患者心理造成伤害。

图1 失去髋关节部分功能的情况Fig.1 Loss of partial function of the hip joint
研究发现,使用髋离断假肢患者的平均步行速度在0.83~1.31 m/s,步长在0.65~0.96 m,均明显小于正常值[9],而髋离断假肢的旋转中心与健侧旋转中心不重合是造成该问题的主要因素。
奥托博克公司研发的髋离断假肢系列产品按转动方式分为单轴转动和多中心轴转动两种。见图2,以7E7为代表的单轴转动型假肢,其旋转中心位于支撑板底部,使用过程中需要使用者通过提胯甩腿的方式将假肢甩出。在步态周期中,该方式会引起髋关节角度变化,在承重反应期与迈步相中期发生突变,造成步态不对称。 以Helix为代表的多中心轴转动型假肢,其旋转中心位于支撑板倾面,工作方式同样依赖惯性,其角度变化峰值特征仍然与正常人吻合度不高[8,10]。

图2 传统单轴及多轴髋离断假肢结构
本研究通过设计一种双平行四边形机构,将髋离断假肢的旋转中心定位在残肢髋臼,并依靠电机提供屈髋过程中的动力补偿,提高假肢与健肢旋转中心的重合度,从而缓解传统髋离断假肢使用者的步态不对称问题。
2 髋关节假肢步态对称性及稳定性分析
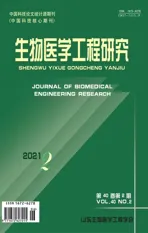
完整步态中,正常人的步态平衡主要基于腿部结构的抗外力干扰机制,支撑期重心集中在单条腿。此外,正常人的步态具有近似对称性[11-12],而目前髋离断假肢普遍存在步态不对称的问题,限制了髋离断假肢的应用。传统髋离断假肢中多中心轴旋转结构通常固定在支撑板倾面,单轴旋转结构通常设置在支撑板底部,见图3。多中心轴旋转结构近似模拟了人体髋关节股骨与髋骨之间球窝副连接方式,弥补了髋关节在行走过程中旋转及左右摆动自由度,将髋关节运动保持在一条直线上。因此,使用者的体验感优于单轴旋转的髋离断假肢,但假肢的使用方式依然是通过提胯动作用力将假肢甩出。
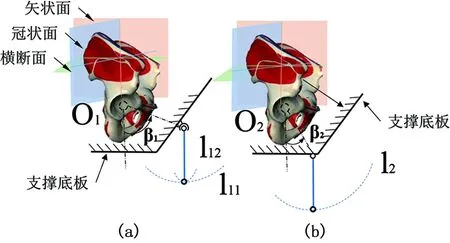
图3 传统髋离断假肢的工作方式 (a).多中心轴转动;(b).单轴转动Fig.3 The working method of traditional hip broken prosthesis (a).multi-axis rotation;(b).single-axis rotation
2.1 矢状面内步态对称性分析
一般情况,正常人的步态具有近似对称性,即a≈a1,见图4。图中未标记阴影部分杆件表示正常人腿,标有阴影杆件为传统单轴假肢,确保在站立位置患者健侧与假肢均接触地面,迈步方向见图4。对于佩戴传统髋离断假肢的患者来说,可以得到:

图4 步态不对称模型Fig.4 Asymmetric gait model
(1)
b1=l1sinα1+l2sinα2+l3sinα3+l4sinα4-Δx
(2)
Δx=Δlsinβ
(3)
使用传统髋离断假肢的患者在行走过程中步幅之间的尺寸差异可以表示为:
Δb=b-b1
(4)
式中,l2与l4均表示小腿长度,即l2=l4。根据步态具有近似对称性,可以得到α2≈θ4,α4≈θ2。由式(1)、式(2)、式(3)可以推出,随着β的增大,跨步长b增大,相反的跨步长b1减小,最终导致患者在行走过程中步幅之间的尺寸差异Δb增大,从而影响髋离断假肢使用者的步态对称。
2.2 站立期稳定性分析
通过动态分析可知,β大小是影响步态不对称的关键,以单轴旋转的髋离断假肢为例,如果无限制地减小β,使β=0,见图5。图5(a)为普通单轴旋转髋离断假肢中点支撑期结构示意,图5(b)为理想状态下β=0时,普通单轴旋转髋离断假肢中点支撑期结构示意。

图5 不同状态下的稳定性分析 (a).β≠0 ;(b).β=0Fig.5 Stability analysis under different conditions
髋离断假肢一般通过支撑底板与残端接受腔连接,人体部分重力通过残端接受腔作用于支撑板。在髋离断假肢处于中点支撑期时,上身动作或姿态会导致人体重心的偏移,支撑底板的受力分析描述相对于单点受力,均匀载荷模型更为合适。现将支撑底板分为两个受载区域,底部水平面承受较大的均匀载荷q1,倾面受较小的均匀载荷q2,当人体上身发生前倾或后仰动作时,支撑底板的载荷分布发生变化可相应地增大q2或q1。结合现有髋关节的运动特点,现有髋离断假肢关节旋转设有一定范围,图5状态下假肢部分与支撑底板的相对转动方向同标示方向。
图5(a)所示的力学分析:
FA1=q1(a+htanβ1)+q1(b-htanβ1)+q2c
(5)

(6)
图5(b)所示的力学分析:
FA2=q1a+q1b+q2c
(7)
(8)
综上,FA1=FA2,即表示在两种不同结构上施加等大的作用力,且当MA>0时,假肢处于稳定状态;MA<0时,假肢结构不稳定,支撑底板有前倾的危险。
MA1-MA2=q1htanβ1(a+b)+q2chtanβ1
(9)
其中β1>0,故MA1-MA2>0,且随着β1角度的增大而增大,相比较于图5(b)所示结构,图5(a)所示结构能够承受更大的前倾力,站立位能够提供更稳定的支撑。综上所述,矢状面内β角的存在是造成步态不对称的关键,但β角的存在又对患者站立位起到一定的稳定作用。
3 拟合人体股骨旋转中心的髋关节假肢机构设计
远程运动中心(remote center of motion,RCM)机构[13-14]是指在机构远端提供一个虚拟的旋转中心,机构可以绕该虚拟的旋转中心自由旋转,见图6。

图6 远程运动中心机构原理图Fig.6 Mechanism diagram of the remote motion center
由图6可知,远程运动中心机构由双平行四边形平面耦合形成,A点、B点为固定铰链,l表示末端执行器安放位置,P点绕O点做圆周运动且运动轨迹在图中已通过点划线标出。
造成现有佩戴髋离断假肢患者步态不对称的原因主要是因为假肢侧旋转中心与健侧股骨旋转中心在矢状面内高度不重合。远程运动中心机构可以使末端执行器绕空间内某个固定点做旋转运动,其运动特征与人在正常行走过程中股骨运动特征相符,且远程运动中心机构用于髋离断假肢可以将虚拟的旋转中心定位到髋离断患者残端髋臼位置,见图7。

图7 新型髋离断外动力假肢模型Fig.7 A new type of power hip disarticulation prosthesis model
选定站姿为初始姿态,曲腿方向为正向转动,整个髋离断假肢可以实现-15°~90°的自由旋转。其中正常步态周期内假肢摆动角度范围-10°~55°,坐姿假肢髋关节角度最大值达到90°。假肢底座设有一定厚度,且部分包容假肢主体与之滑动接触,当使用者站立时,部分人体重力可直接作用于假肢主体,有助于提高假肢的最大承重能力。
4 运动学分析
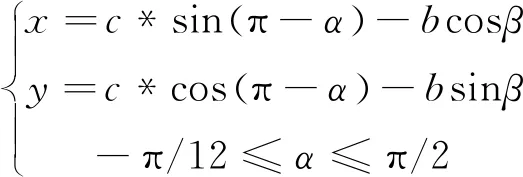
见图8,若定义C点为坐标原点(0,0),旋转中心O点可表示为(-bcosβ,-bsinβ),C点到D点的距离由c表示,α为FG偏离初始位置夹角,规定顺时针方向为正,逆时针方向为负,则末端F点的运动轨迹可表示为:

图8 远端定心结构示意图Fig.8 Structure diagram of distal centering
(10)
其中,当α=π/2时,对应人体坐姿。
髋离断外动力假肢的运动学模型见图9,旋转中心O点到膝关节K点的距离,近似模拟了患者健侧股骨的实际尺寸,DF的长度以及初始位置DF与水平面的夹角β决定了旋转中心O点的位置,可以通过调节DF的长度与β的大小来控制旋转中心O的位置,使得旋转中心在残肢髋臼中。电机M顺时针转动,模拟屈髋过程,电机M逆时针转动,模拟伸髋过程,整个运动过程旋转中心保持不变,且位于残肢髋臼中。
假肢中髋关节角度变量μ与远端中心机构中FG与GN夹角θ的关系为:
θ=90°+μ-β
(11)
电机转速ω与θ变化量Δθ之间的关系可表述为:
(12)
由图8可知,合理的杆长设计可使FG(模拟大腿)相对于骨盆的虚拟转动中心始终在髋臼中心,提高了假肢旋转中心与健侧股骨旋转中心的重合度;图9解释了外动力假肢的驱动原理,为实验样机的制作提供了理论依据。

图9 新型髋离断外动力假肢运动学模型
5 实验
受试者(男,身高175 cm,体重60 Kg,左侧髋关节部位截肢)穿戴传统假肢在跑步机上以1 m/s的速度行进,通过固定在受试者肢体及假肢上的角度传感器采集步态数据,见图10(a)。将采集到的健侧髋关节角度数据输入新型髋离断外动力假肢中,搭建测试平台,机械臂末端模拟受试者骨盆运动轨迹,跑步机速度设置为1 m/s,通过固定在假肢上的角度传感器采集步态中假肢髋关节角度数据,见图10(b)。

图10 步态测试实验平台(a).受试者佩戴传统假肢步态采集;(b).新型髋离断外动力假肢步态测试平台Fig.10 Gait test experimental platform(a).the subject wears traditional prosthesis for gait acquisition;(b).a new hip disarticulation external power prosthetic gait test platform
骨盆左右方向运动轨迹数学模型[15]:

(13)
骨盆上下方向运动轨迹数学模型:
(14)
式中,v表示步行速度(m/s),h表示身高(m),k=0,1,2…。
图11(a)为采集到的受试者健侧与假肢侧髋关节角度变化,由图中髋关节角度变化趋势可知,受试者步态存在明显的不对称,且假肢侧的髋关节角度变化明显小于健侧髋关节角度变化。图11(b)为一个步态周期内受试者健侧、传统假肢及新型假肢髋关节角度变化对比,在一个完整步态周期内,新型外动力假肢的髋关节角度变化整体上更接近受试者健侧髋关节角度变化规律。
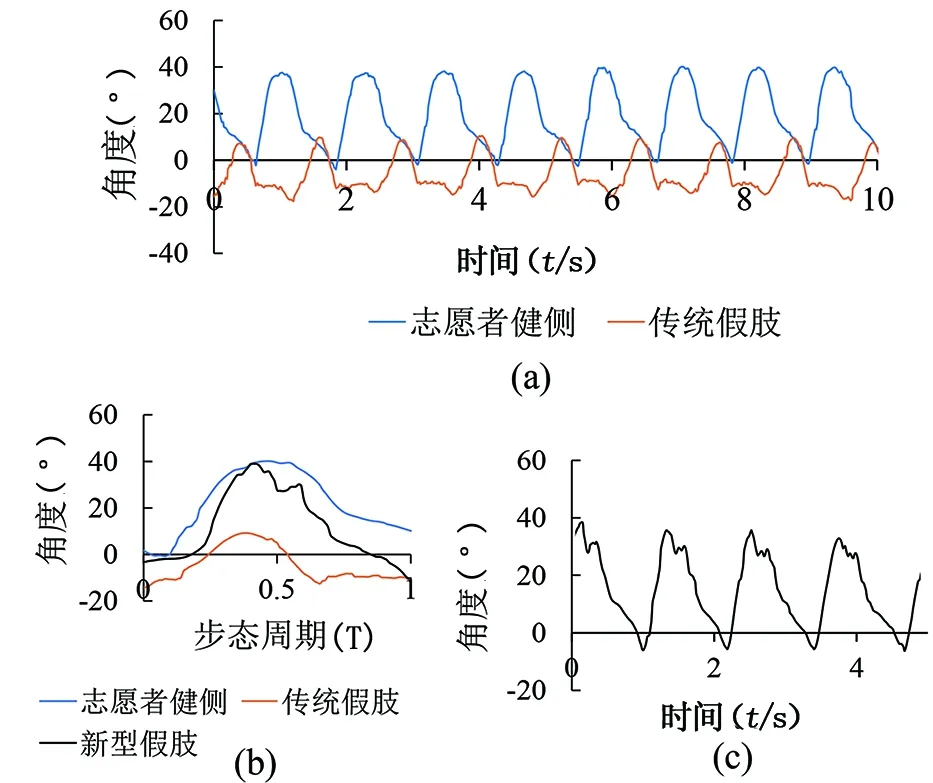
图11 髋关节角度数据采集结果 (a).受试者佩戴传统假肢的髋关节角度信息;(b).一个步态周期内新型假肢、传统假肢以及健侧髋关节变化比较;(c).1 m/s步速下新型假肢髋关节角度信息Fig.11 Results of hip joint angle data collection
6 结论
本研究通过建立几何模型,分析出假肢髋关节旋转轴心与人体健侧旋转轴心不重合是佩戴传统髋离断假肢患者步态不对称的原因,使用双平行四边形机构完成了新型髋离断外动力假肢的制作,成功地将髋离断假肢的旋转轴心近似定位到患者残肢端的髋臼位置,以提高佩戴新型髋离断假肢患者两侧髋关节旋转轴心的重合度,从而改善髋离断假肢使用者步态不对称的问题。增加电机是为了实现对患者行走过程中的屈髋助力,以帮助解决假肢使用者体力消耗增加的问题,具体将通过患者健肢侧肌电信号来控制假肢的运动状态,这是本研究后续的研究重点,也是实现智能假肢控制的重要方向。