同步移动踏板式康复训练助行器的研究*
2021-07-23曲春鸽邹任玲刘二宁项林卢旭华
曲春鸽,邹任玲△,刘二宁,项林,卢旭华
(1.上海理工大学医疗器械与食品学院,上海 200093; 2.第二军医大学附属上海长征医院骨科,上海 200003)
1 引 言
脊髓损伤(spina cord injury,SCI)[1]患者有严重的下肢行动障碍,日常活动(activities of daily living, ADL)能力下降,严重影响生活质量。为改善SCI患者运动功能和ADL能力,使用康复仪器进行下肢训练是一种非常有效的临床治疗方法[2-4]。步态训练方式一般分为外骨骼式和踏板式,外骨骼式通常沿着下肢的几个关节点,将仪器固定在腿部,这会限制腿部的自由度[5-9]。而踏板式几乎不限制几个关节点的自由度,其步态轨迹更贴合日常生活,不仅可以模拟地板行走,还可以模拟爬楼梯运动(抬腿与放下)[10-11],对患者来说,使用踏板式步态训练器能更好地适应日常生活。下肢康复初期患者往往需要体重支承(body weight support,BWS)[12-13]减重训练,该方法通过工具支承患者,减轻身体负重,使下肢能按符合人体运动学的步态进行周期性的康复训练,为无法站立患者初期的康复提供了一种新思路。实验表明,经过周期性的训练,有BWS的训练效果明显好于非BWS训练的效果[14-17]。
目前,BWS系统与步态训练器结合已应用于临床,第一类将BWS系统和外骨骼步态训练器结合起来,在原地跑步机训练的Lokomat[18]、Auto-Ambulator[19]、ALEX[20]、LOPES[21]等是采用原地训练方式,无法移动,下肢也无法模拟爬楼梯的步态训练轨迹,训练模式不够贴合患者日常生活需求;第二类将BWS系统与步态矫形器结合起来在地面行走的WalkTrainer[22]、NaTUre-gaits[23]、Walking assistance apparatus[24]等,虽设有移动平台,并装有轮子,具有一定的移动性,但其下肢是柔顺步态训练,主要用于步态矫正,通过运动训练恢复肌肉功能占少数;第三类将BWS系统与踏板式步态训练器结合起来的G-EO-Systems[25]、GaitTrainer[26]、Haptic[27]等,是采用踏板式步态训练器,但未实现移动训练,无法满足患者的移动意愿。因此,开发一款能移动的与BWS系统结合的踏板式步态训练器具有重要临床意义。
2 机械结构设计
2.1 总体结构
空间移动踏板式康复训练助行器主要分为支承减重车、踏板式步态训练器和联动装置三个部分,助行器总体结构见图1,助行器样机见图2。支承减重车有减重、移动和安全保障三方面功能,实现患者移动训练功能。踏板式步态训练器保证训练功能,置于支承减重车上,采用足底驱动形式,运动模式可调节,确保患者步行训练的个性化。联动装置将踏板式步态训练器与减重车的车轮相连,实现踏板和减重车的联动,使患者步行训练速度与支承减重车移动速度匹配,满足患者在房间移动进行日常作业等活动的需要,增强患者的独立日常生活能力。
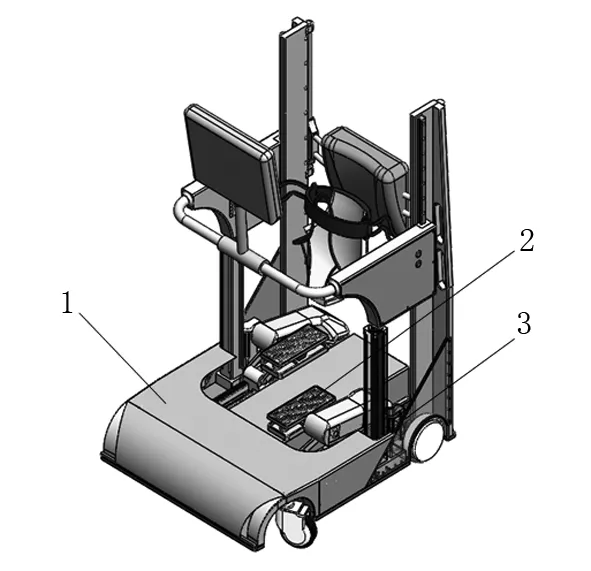
注:1.支承减重车;2.踏板式步态训练器;3.联动装置

图2 助行器样机
2.2 支承减重车
支承减重车包括移动平台、体重支承系统和安全靠背装置,见图3。
移动平台四个角安装轮子,前轮是轮毂电机,安装在减重车的轮毂支架上,控制左右转向。后轮与联动装置连接,是联动装置的输出端,联动装置由脚踏板的轨迹驱动,当踏板向前运动带动后轮向前,反之向后。后轮作为驱动轮,实现了脚踏板与后轮速度的联动,配合患者的行动意愿,使患者在训练过程中能够空间移动,极大增强患者独立训练和生活自理能力。 体重支承系统包含两部分,一是上肢支承升降装置,作用于患者腋下;二是跨部支承装置,作用于患者上肢。这两部分均能对患者起到支承作用,避免患者单个部位承受过大的压力,同时,帮助患者保持躯干直立、膝盖不弯曲,有效地进行下肢康复训练。上肢支承升降装置由电动缸和扶手构成,根据患者的身高控制电机改变升降台高度,患者的上肢作用在升降台处,支承一定比例的体重。跨部支承装置的绑带一端作用于患者胯部,另一端与升降装置连接,调节升降装置高度,可以改变支承程度,通过绑带带动患者跨部移动,帮助患者处于站立状态,对患者起到支承作用。
因SCI患者运动控制能力降低,跌倒风险也随之增加[28-29],在训练过程中可能失去平衡,安全靠背装置是有效的保护措施,以防患者摔倒。本研究的安全靠背装置通过卡扣与减重车连接,患者需要从后侧进入减重车时,靠背可拆卸,方便使用,同时保障患者安全。

注:1.移动平台;2.安全靠背装置;
2.3 踏板式步态训练器
根据人体运动学设计的踏板式步态训练器,见图 4。根据步行运动轨迹,由三个电机控制。丝杆电机控制丝杆的转向和转速,可改变安装在丝杆上的后滑块的运动方向和速度,后滑块固定块与脚踏板后端连接,使脚踏板后端与后滑块的运动状态一致。齿轮电机通过控制齿轮的转向与转速,改变齿条的运行速度和方向,前滑块连接在齿条上,跟齿条的运动状态一致,前滑块通过连杆与脚踏板前端连接。前、后滑块有速度差,脚踏板前端在前后滑块互相远离时,高度会下降;在前后滑块互相靠近时,高度会上升。踝关节电机控制脚踏板的角度,位置不同,踝关节的角度也不同。根据步态轨迹,调整脚踏板角度,使患者踝关节角度适应步态,由此构成模拟正常人步行和爬楼梯步态轨迹的装置。
2.4 联动装置
联动装置是实现步态训练器与减重车联动的关键结构,其结构见图 5,与步态训练器和后轮的连接方式,见图 6。步态训练器的踏板轴与联动装置的滑槽是槽口连接,滑槽将步态轨迹转化为主动小齿轮的周转运动,带动大齿轮转动,传动给被动小齿轮,减重车车轮与被动小齿轮轴联动。当踏板向前跨步时,车轮向前转动;向后跨步时,车轮向后转动,能根据患者的意愿改变减重车的运动状态,实现空间环境移动。

注:1.丝杆电机;2.齿轮;3.齿轮电机;4.丝杆;5.脚踏板; 6.踝关节电机;7.后滑块;8.前滑块;9.齿条

注:1.滑槽;2.主动小齿轮;3.大齿轮;4.被动小齿轮

注:1.踏板;2.踏板轴;3.小齿轮轴;4.车轮
3 助行器运动仿真
对空间移动踏板式步态康复训练助行器进行仿真,验证步态轨迹能通过联动装置传动为驱动小齿轮的周转运动,在Solidworks的motion模块中,给脚踏板添加速度为50 mm/s的轨迹马达,参考德国柏林技术大学踏板式步态训练器Haptic模拟平地走路的运动跟踪数据,步长约为800 mm,抬腿高度约为150 mm[30],使脚踏板按图 7所示的步态轨迹运动,联动装置受到脚踏板的驱动,带动后轮转动。在竖直方向上添加引力,根据助行器最大承载能力为体重100 kg的患者,单侧踏板承担50 kg载荷,即500 N,在踏板表面添加500 N垂直于踏板的力。

图7 步态轨迹
计算得后轮和脚踏板角速度曲线,见图8,在一个步态周期内,给予步态轨迹一个50 mm/s的稳定输入速度,与其联动的驱动小齿轮角速度曲线光滑无尖点,传动平稳。后轮角速度曲线随着驱动小齿轮角速度曲线的变化而变化,说明踏板驱动联动装置传动给后轮的过程中,有一定的相关性,且输出平稳,未发生较大震动,在患者(假定最大体重100 kg)训练过程中,联动装置有较好的驱动效果,可以使后轮平稳转动,表明空间运动联动的设计是合理的。
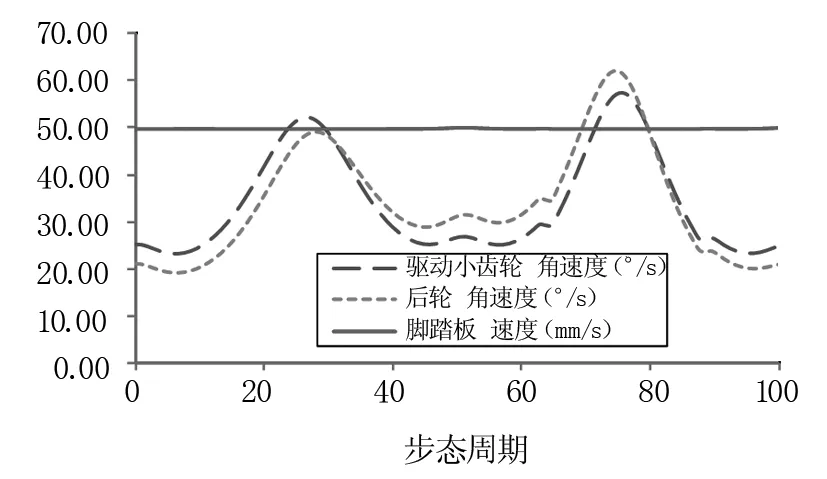
图8 仿真结果
4 系统控制设计
助行器的系统控制包括步态训练器轨迹控制、支承减重机构控制以及移动平台转向控制三部分。步态轨迹以及支承机构的运动由USB1020运动控制卡驱动,USB1020分别控制4轴独立运动,包括步态训练器的三个闭环步进电机以及支承减重系统的伺服电动缸,运动控制模块,见图 9。单侧踏板由三个闭环步进电机作为执行机构,采用取点法将步态轨迹数据转换为电机运动控制参数,根据所取两点间的近似直线距离,转换为电机运动情况所需脉冲数。程序发送所需脉冲,并基于运动控制卡提供的三轴插补运动功能编程,完成整个康复训练轨迹的模拟。
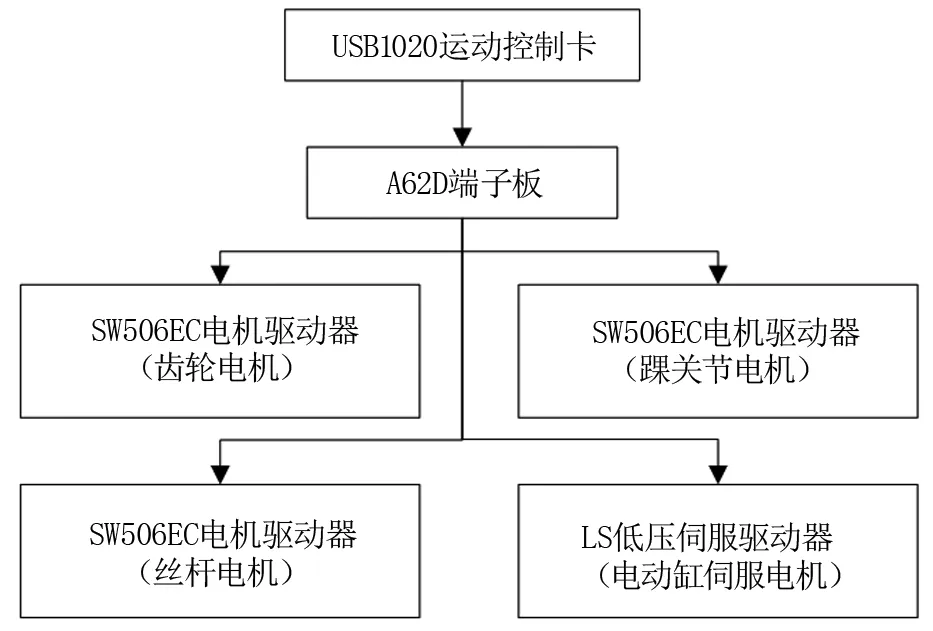
图9 运动控制模块
移动平台前轮装有两个轮毂电机作为移动模块的转向驱动机构。两侧脚踏板下方各布置了两个压力传感器,以左右足底压力差为依据,获取患者的转向意图。当差值超过设定范围时,控制前轮轮毂电机向压力较大的一侧转向,实现助行器的移动转向。后轮与联动装置配合,由步态轨迹驱动,其转动方向与患者迈步方向一致,实现同步移动训练功能。移动模块见图 10。
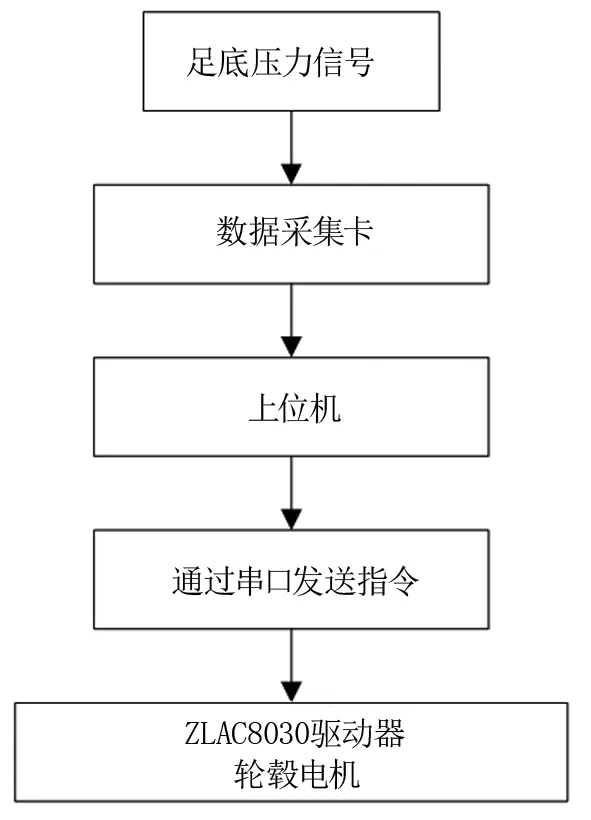
图10 移动模块
5 总结与讨论
本研究的踏板式康复训练助行器,通过联动装置连接脚踏板与后轮两部分,在Solidworks的Motion模块中对助行器进行运动仿真,给脚踏板设定步态轨迹,通过联动装置传动给后轮,改变助行器的运动状态。仿真结果表明,后轮的角速度随着驱动小齿轮角速度的改变而改变,运动曲线光滑无尖点,输出稳定无卡死情况,且未发生较大震动。在运动仿真环境下,助行器可以很好地配合患者的行动意愿,实现同步移动训练功能,增强患者日常生活自理能力。助行器采用两部分体重支承装置,分别作用于患者的上肢和胯部,将压力分布于多个部位,避免单个部位受压过大,使患者训练更加舒适。设置的安全靠背装置,可防止患者摔倒受伤,保障患者训练过程中的安全。后续将进一步进行临床实验,以验证助行器的运动及训练功能在实际环境中的有效性。