基于双目摄像铅球投掷距离测试仪设计
2021-07-19陈红利王亚朋郭晓瑜
周 凯 姚 洁 陈红利 王亚朋 郭晓瑜
1.河南工程学院体育部 河南 郑州 451191;2.河南工程学院电气信息工程学院 河南 郑州 451191
引言
目前,国内田径赛场中,特别是大、中、小学内部的田径比赛,测量方法多采用人工测量方法、无法保证测量的公开公正和公平。因此,自动测量装置的研发成为体育竞赛部门关心的一个问题,许多电子工程师更是为竞赛部门研制了各种比赛电子设备。激光测距仪的工作原理是采用激光在空间两点之间传播与反射的时间与传播速度C的乘积的一半来计算,这种测量方法,由于光速快,时间测量带来了准确度误差。红外线测距仪利用的是红外线传播时的不扩散原理。红外线在穿越其它物质时折射率很小,长距离的测距具有一定优势,测量方法是红外线从测距仪发出碰到反射物被反射回来被测距仪接受到,再根据红外线从发出到被接受到的时间及红外线的传播速度就可以算出距离。
综上所述,设计新型测量仪具有一定意义,本文描述一种基于摄像技术的测距仪,以解决时间测量的影响误差。
1 双目测量原理
1.1 测量原理 双目摄像铅球投掷距离测试仪主要是采用双目视差测距技术,从两个视角观察同一物体,获取物体在不同视角下的图像,经过处理得到视差信息,通过三角测量原理计算出像素之间的偏移来获取物体的三维几何信息,从而进行距离测量。目前,双目视差测距系统主要有平行双目结构和光轴相交的汇聚式双目结构,前者结构简单,几何关系和计算过程也相对简单,故本设计选用平行双目视觉系统进行测距,其原理如图1:
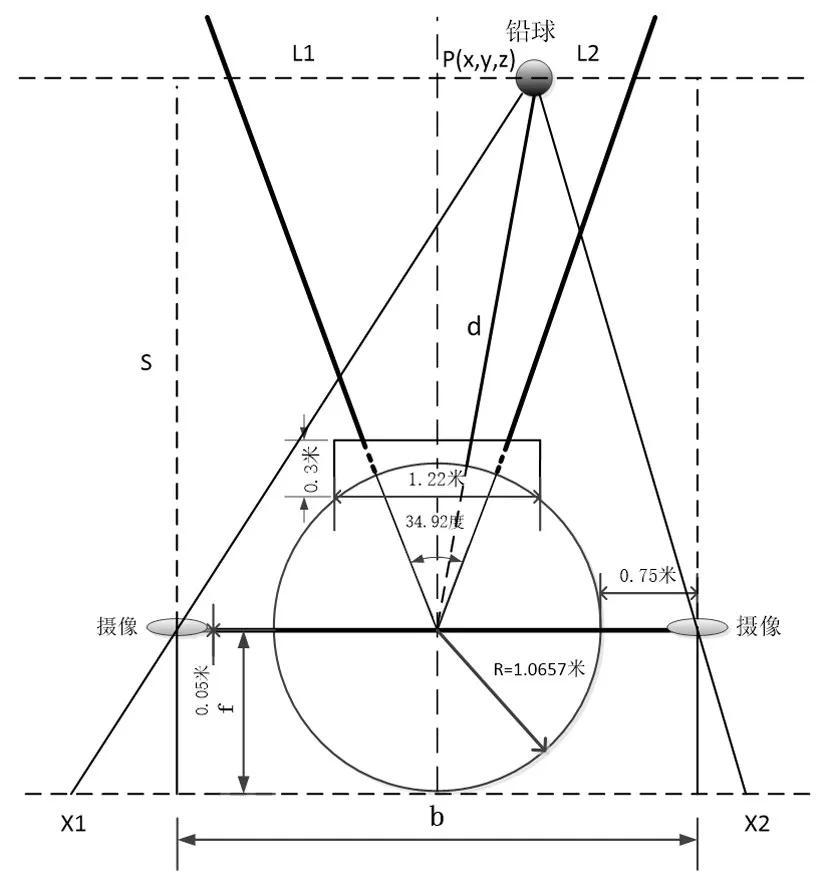
图1 平行双目视觉原理图
图中:f为相机焦距;b为左右两相机投影中心线的距离(基线距);R为投掷圈半径,铅球P(X,Y,Z)在成像系统中平行的两个位置成像,其成像平面y轴坐标必然相同,只有x轴坐标不一致,像点在x轴的横坐标为X1,X2,视觉差即为X=X1+X2。铅球到投掷圈的距离为d,所以到投掷圈圆心的距离D=d+R。
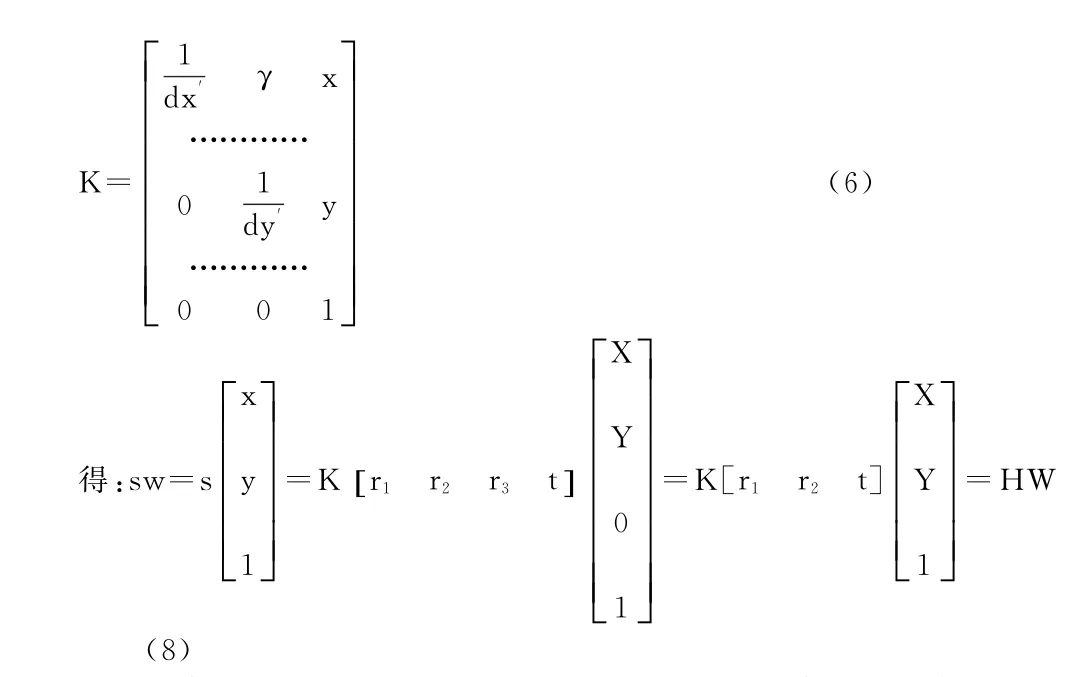
令P点到成像系统的距离为S,由已知条件和三角形相似可得:

联立以上各式,解得d,由上式可得,只要确定系统中光组的有效焦距f,L1和L2、X1和X2即可算出d。
1.2 关键技术
(1)图像获取:图像获取就是以成像设备代替双目,获取标的物图片信息的过程,一般而言,可以分为双相机和单相机移动的方式。
(2)图像预处理:在双目视觉系统中首先要对图片进行预处理,如滤波、去噪、增强、校正等,以保留图片中有用的可靠像素信息,方便后期处理,增加准确性。
(3)特征提取:图片中包含了大量的数据,我们进行后续标定及匹配处理中,需要针对具中具有重要特征的部分,比如角点、边缘等信息进行计算,这些就是特征提取的对象。准确快速高精度的特征提取,一方面可以为相机标定做铺垫,一方面也是图像匹配的必要过程。
(4)相机标定:相机标定就是确定相机内外参数的过程。可以通过已知坐标的外界标定物,首先推算单相机的内参,再推算两个相机的相对位置关系,计算外参。
(5)图像匹配:双目视觉系统中,左右相机对于标的物分别获取图片,一张立为模板图片,另一张为搜索图片。理论上说对于标的物的每一个物点,在两张图片上就可以找到对应的两个像点称为共辄像点,则搜索共辄像点的过程就是图像匹配。
(6)三维重建:在图像匹配过程中我们找到了物点对应的一对共辄像点,那么,根据像点的视差信息,就可以推算出物点的坐标信息,这就是三维重建。
2 系统设计
2.1 系统结构 系统由成像部分和软件计算部分组成。成像部分包括主控电路、相机成像部分、上位机显示部分,相机采集图像信息,将图像信息转换为数字信号,经算法处理转换输出结果传输到上位机显示。双目摄像是一种更接近于人眼的视觉模型,其最大的优点就是可以通过模型的视差原理,利用三角测量的方法快速得到目标的三维空间距离,适用于距离目标的测量,且精度高。系统总体如图2所示。
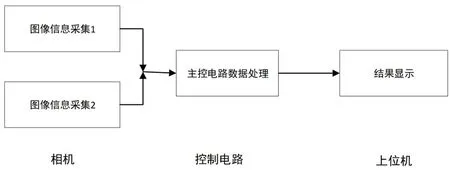
图2 系统总体图
2.2 立体标定 现实世界中的物体是通过相机的皇族成像,在经过数字计数在我们的显示设备上看到的数字图像,图像中任意一点的物象位置表示为三维坐标可形成一一对应关系,成像过程中,应为相机采集图像会有畸变等因素,需要对成像模型修正。利用数学算法求经过修正后的几何成像模型的参数过程就是立体标定,立体标定的精度对测距是否准确有很大的影响,是系统中很重要得到一个参数。使用棋盘格标定板的标定方法对相机参数优化。令标定班所在平面世界中Z=0,令W=[X Y 1]T为模板平面上点的其次坐标,w=[x y 1]T为其对应的图像平面上的投影坐标,ri为R的第i个向量,由相机内参数表达式
标定板参数确定的情况下w和W已知,用最小二乘法解出单应性矩阵H后面根据矩阵知识线性解出参数的初值。有多幅标定图片的时,借助最大似然法可以对相机参数进行优化。

设对标定板拍摄n张照片排列为(1,2…i…n),提取照片上标定板m个角点(1,2…j…m);
则mij为提取的角点坐标,m'为通过已知的初值换算的理论值,使其差值平方和最小的参数即为优化值。求解方法是使用LM算法进行迭代。立体标定过程如图3所示。
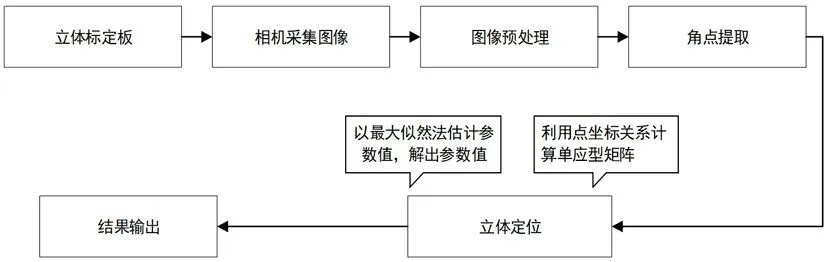
图3 立体标定过程图
2.3 立体校准 立体校准是将左右图像高度对齐,在寻找图像中的某一特征点对应的点的时候只需在另一幅图像的同一行或者同一列搜索不需要对整个图像进行完全扫描,减小工作量。显而易见的现实环境中摄像机拍到的照片高度不可能完美对齐,使图像对应,使用函数校正。校正前图像如图4所示,校正后图像如图5所示。
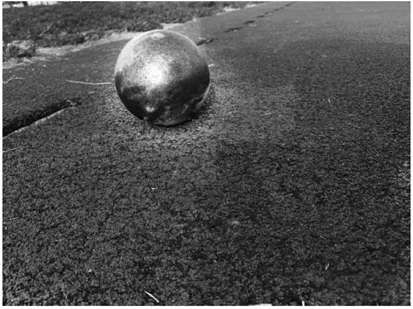
图4 校正前图像
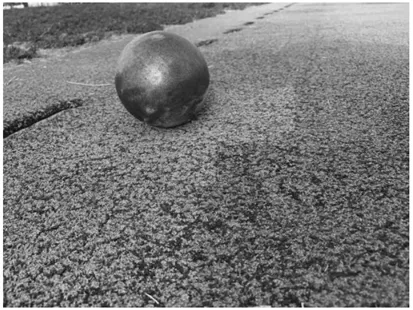
图5 校正后图像
3 结论
测量结果及平均误差值,实验结果如表1所示。
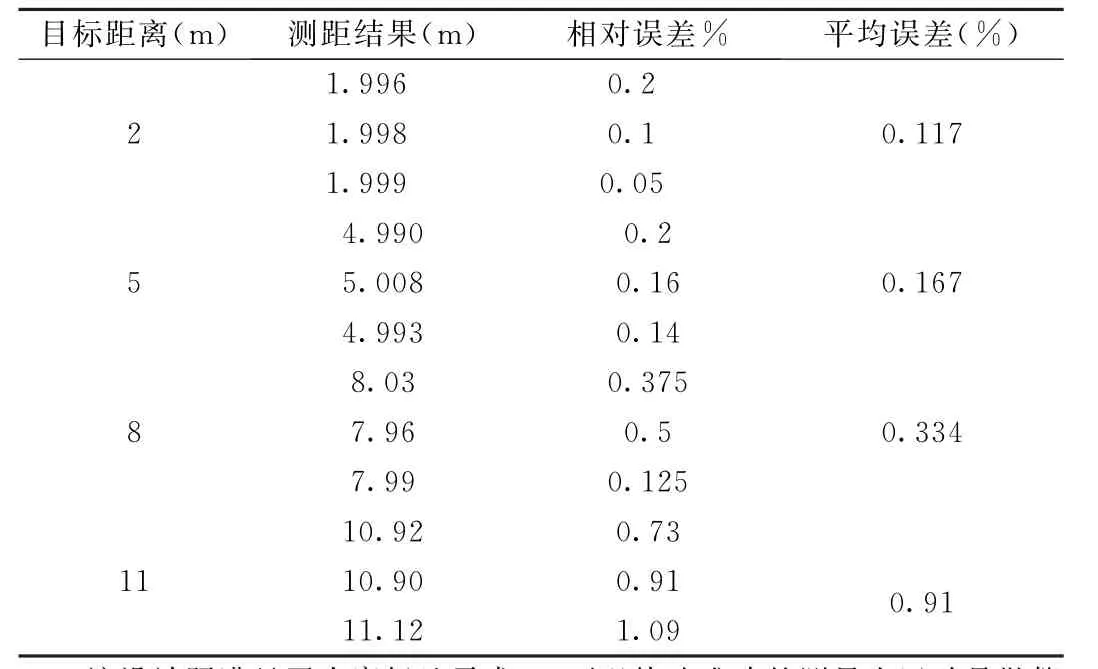
表1 实验结果
该设计既满足了次赛场地需求,又可以快速准确的测量出运动员抛掷千秋后的距离成绩。相比于目前使用的测距系统有很大的提升,达到正规比赛的技术要求,也保证了比赛的公平性。
