欧洲球载太阳望远镜SUNRISE及相关研究成果简介*
2021-07-15刘艳霄宋腾飞吕群波夏利东孙明哲宋红强张红鑫宋海军杨晓许张雪飞王晶星金振宇江朝伟
刘艳霄,宋腾飞,张 涛,黄 旻,吕群波,项 磊,夏利东, 孙明哲,宋红强,田 晖,张红鑫,宋海军,杨晓许,张雪飞, 王晶星,刘 煜,金振宇,江朝伟,9,林 隽,0,
(1. 哈尔滨工业大学空间科学与应用技术研究院,广东 深圳 518055;2. 中国科学院云南天文台,云南 昆明 650216; 3. 中国科学院空天信息创新研究院,北京 100094;4. 山东大学空间科学研究院,山东 威海 264209; 5. 北京大学地球与空间科学学院,北京 100871;6. 中国科学院太阳活动重点实验室,北京 100101; 7. 中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;8. 中国科学院西安光学精密机械研究所, 陕西 西安 710119;9. 中国科学院空间天气学国家重点实验室太阳-行星际-地磁天气团队,北京 100190; 10. 中国科学院大科学研究中心,北京 100101;11. 中国科学院大学,北京 100049)
发射到平流层的球载太阳望远镜有着地面太阳望远镜不能企及的优势:(1)免受对流层大气扰动的影响,进行高分辨率观测;(2)获取太阳在近紫外甚至远紫外波段的辐射特征。由于到达地面的紫外辐射被附近稠密的大气吸收,地面太阳望远镜无法观测到来自太阳的紫外辐射。另外,球载太阳望远镜与空间太阳望远镜相比,也有独特的优势。首先,它的研制与发射成本比卫星荷载太阳望远镜要低很多;其次,它可以通过回收球载太阳望远镜对其进行反复利用,不断升级改造,提高利用率;最后,球载太阳望远镜的成功经验也为将要实施的空间望远镜计划提供重要参考。
针对太阳高分辨率观测开展球载任务具有悠久的历史,表1给出了迄今为止放飞过的球载太阳望远镜及其参数。最早的球载太阳望远镜由美国普林斯顿大学天文台发起,他们于1957年向距离地面80 000英尺(约24 km)的临近空间放飞了一个承载着口径为12英寸(约30.5 cm)望远镜的气球[1]。该球载太阳望远镜在当年的8月22日、9月25日和10月17日分别进行了飞行。由于望远镜没有能够准确地指向太阳,第1次飞行没有获得理想的科学数据。第2次飞行一共获取了8 000幅照片,其中,400幅是对准太阳拍摄的。在这400幅照片中,约有5幅得到了清晰的米粒图像。第3次飞行任务得到了更多清晰的米粒图像,同时也获取了日面边缘图像。两年后,他们对仪器进行改进,增加了可视化、遥测和远程控制等功能,并于1959年再次进行飞行观测任务[2]。这次观测获得了米粒、日面边缘和太阳黑子精细结构等高分辨率观测图像,获得的观测资料在多年后仍具有很高的参考价值。1975年,他们在原来的基础上配备了一个光谱仪并再次进行飞行观测,遗憾的是,这次飞行任务只获得了米粒图像数据[3-5]。

表1 球载望远镜基本参数Table 1 Parameters of the Balloon-Borne Missions
前苏联的平流层太阳天文台有过4次飞行观测实验[6-8],前3次球载太阳望远镜口径为0.5 m,第4次口径为1 m,其中,第3次观测提供了米粒组织和太阳黑子在Hα及偏带的观测资料。通过对比在Hα线心观测到的暗芒(Mottle)和在线翼观测到的光球米粒发现,暗芒的尺度比米粒大好几倍[7]。
约翰·霍普金斯大学的应用物理实验室于1996年1月7~26日在南极发射了一个搭载着口径为80 cm望远镜的气球,该望远镜配备一个法布里珀罗磁像仪[9]。由于望远镜对太阳的指向稳定程度不够高,图像运动补偿器无法将图像的抖动幅度控制在0.1″以内,加之望远镜聚焦和图像对齐方面存在问题,这次观测得到的图像分辨率比较低,从而导致这次飞行任务没有得到预期的科学数据[10]。针对这些问题,他们对望远镜进行了改进[10-11],并于2000年1月进行了为期17天的观测,获得了一系列在Ca I 612.22 nm波段的单色光、磁图和多普勒图像,以及在Hα波段的单色光。在获得的5万幅图像中,最高的空间分辨率达到0.5″[12]。
法国国家空间研究中心联合法国恒星与行星物理实验室于1970年10月5日和1971年6月24日分别放飞了一个搭载着口径为20 cm望远镜的气球进行紫外波段观测[13],获得了在200 nm,210 nm,310 nm和460 nm波段的观测资料,在310 nm和460 nm波段上观测到清晰的米粒和光斑。随后,他们进一步更新仪器,增大望远镜口径,并于1982年10月1日成功地将搭载着30 cm口径望远镜的气球放飞到距离地面38 km的平流层进行观测[14]。观测数据在190~300 nm波段达到了0.5″ 的空间分辨率。该望远镜配备了一台紫外光谱仪并分别在190~213 nm和272~293 nm的波长范围内获得分辨率为0.15~0.2 nm的高分辨率光谱数据。
德国马普太阳系研究所于2006年6月8日6:27 UT从瑞典北部放飞了名为 “日出” 的球载太阳望远镜。望远镜对日面中心的宁静区进行了多波段成像观测,并在Fe I 525.02 nm波段进行了偏振测量[15-16]。他们于2013年6月12日开展第2次球载飞行任务,并将观测目标锁定在一个活动区附近[17]。两次球载任务都获得了详实的科学数据和丰富的科学产出,发表了约50篇学术论文。目前,第3次球载任务正在积极筹备中[18]。
本文重点介绍 “日出” 球载任务的仪器装置以及两次飞行任务取得的科学成果。其中,第1节介绍了 “日出” 球载任务的仪器装置;第2节介绍了 “日出” 球载任务两次飞行任务的具体情况;第3节介绍了两次飞行任务取得的观测数据;第4节介绍了根据两次飞行任务得到的观测数据所取得的科研成果;第5节对 “日出” 球载任务的成功之处进行总结,并展望我国未来可能推动的球载任务。
1 “日出” 球载任务的仪器装置
“日出” 球载任务的仪器装置由一个口径为1 m的格雷戈里望远镜(Gregory-Type Reflector Telescope)[19]、一个焦后仪器平台(Postfocus Instrumentation Platform, PFI)[20]和一个具有指向和跟踪能力的吊舱工作台(Gondola)[21]组成。1 m格雷戈里反射望远镜拥有25 m的有效焦距,位于主焦点的排热楔(Heat Rejection Wedge)可以反射照射到其表面99%的太阳光,将透过主焦点的热辐射控制在10 W左右。焦后仪器设备包括1个紫外单色光成像仪(Sunrise Filter Imager, SuFI)[22]、1个磁像仪(Imaging Magnetograph eXperimet, IMaX)[23]、1个稳像和光分配系统(Image Stabilization and Light Distribution system, ISLiD)[22]以及1个波前改正系统(Wave-Front Correction System, WCS)[21]。吊舱工作台为望远镜、仪器和电源等装置提供一个外罩,并保证望远镜的稳定度、跟踪精度和指向精度。图1给出了 “日出” 球载太阳望远镜系统放飞前的场景(a)以及望远镜的总览图(b)。

图1“日出” 球载太阳望远镜总览[20]。(a)日出球载太阳望远镜即将放飞的情景;(b)球载任务的仪器装置总览图
1.1 1 m格雷戈里望远镜
“日出” 球载太阳望远镜是一个质量比较小的格雷戈里反射式望远镜,主镜M1的镜面为抛物面,有效通光口径为1 m。图2(a)展示了望远镜的光路图:来自太阳的平行光通过主镜M1反射,聚焦到第1焦点F1上,在F1处形成一个真实的太阳像。在F1处的光阑(Field stop)允许一小部分光通过并到达副镜M2上,减少了到达副镜以及之后光学器件的热量。M2的等效直径为0.245 m,焦距为0.505 m,M2反射的光经过两个45°镜(M3和M4)反射后重新汇聚到位于主镜上方的焦后仪器平台的第2焦点F2处,置于第2焦点F2处的光阑进一步将视场限制在180″ 以内。
图2(b)展示了望远镜组件的整体结构。黄色的钢支架通过连接围绕主镜的后环、围绕副镜的前环以及中央支架,将望远镜组件以及焦后仪器装置支撑并固定。围绕副镜的组件有排热楔、八角形的前环、安装在前环上的散热片(HRW radiators)、洛克希德中级分辨率太阳感知器(Lockheed Intermediate Sun Sensor, LISS)和全程高度仪(Full Range Elevation Device, FRED)。其中,洛克希德中级分辨率太阳感知器和全程高度仪属于吊舱工作台上的组件,洛克希德中级分辨率太阳感知器用于帮助望远镜指向太阳,而全程高度仪负责跟踪太阳;前环以及安装在前环上的组件一直面对太阳并接收来自太阳的高温辐射;位于前环上的散热片和第1主焦点处的排热楔主要负责为望远镜组件降温。
围绕主镜的组件主要是后环、3个片状挡板和2个45°镜(M3和M4),后环主要用于支撑主镜(图2(a))。主镜背面片状挡板的外侧可以较好地反光,使镜子避免接触来自地面的红外辐射和来自地面(冰)或海洋的阳光反射,负责控制主镜的温度。主镜正面的表面有铝涂层,厚度为100 nm,镜面涂层吸收了约80 W的太阳辐射。M3和M4主要负责接收来自M2的反射光并改变其光路,使第2焦点落在主镜上方。第2焦点位于主镜上方的好处是能够将不同功能的仪器集成在一个小空间,缩小了整个装置的体积。

图2(a)格雷型反射望远镜光路图;(b)望远镜装置的整体结构图[20]Fig.2(a) The optical design of Gregory-Type Reflector Telescope; (b) The sketch of telescope structure[20]
中央支架的左右两侧各安装一个连接吊舱工作台的具有车轴功能的轴承,恰好与望远镜连同焦后设备的重心在同一高度上。这对轴承有两个主要功能:(1)连接望远镜和吊舱工作台;(2)使望远镜能够通过轴承构架的横轴调整俯仰角大小,实现望远镜对太阳的精准指向。前环、后环和支架均采用碳纤维增强型塑料复合材料(Carbon Fiber Reinforced Plastic Composite Materials)制成,具有强度高、重量轻、热膨胀小等优点。支架的刚度设计可以保证前环和后环在重力负荷中的横向位移大致相同,有效保持仪器之间的平行。即使支架因为重力负荷变化而发生相对横向位移,它们之间的连接结构也能够保持主要部件之间的平行,同时能够将M1和M2的位置变化控制在毫米量级。
入射光到达主镜并反射,在F1处汇聚成一个横截面直径为22 mm的圆形光束,辐射功率高达1 kW。为减小如此高的能量聚集对其他设备的影响,需用散热器进行有效降温。如图3,在F1处安装的排热楔是一个高导电的圆筒状铝块。它的楔形正面反射涂层(紫外反射增强涂层)能将来自主镜99%的入射光反射。排热楔吸收的能量被排热管传到前环的散热器上,将排热楔的温度降至25 ℃以下,从而避免图像干涉条纹的形成,进一步避免由于条纹的形成而导致的波前变形。排热楔能够将通过中心圆孔的太阳辐射功率控制在10 W左右。

图3 副镜及前环组件CAD模型[20]。右图展示了副镜及前环组件,左图展示了散热片和排热楔
由于在第1焦点F1周围聚焦的能量非常高,光路一旦失去控制,很可能损坏附近其他的结构部件。针对这种意外情况所采取的保护措施是在中央支架朝向太阳一方的平面上安装一个可伸缩幕帘。它能够在太阳感知器指向不准确等意外发生时通过遮挡主镜来保护主镜部件。可伸缩幕帘从启动到完全遮挡主镜孔径需要约20 s,远低于视场光阑附近部件的临界曝光时间。在飞行过程中,可伸缩幕帘由计算机指向系统控制。当指向误差超出 ±15′时,可伸缩幕帘进入遮挡模式,直到指向精度控制在 ±20″以内时退出。这样可以很好地保护主镜部件。
1.2 焦后仪器平台
焦后仪器平台位于望远镜的上方(见图2(b)),宽度与望远镜的宽度相同,约为1.4 m,长度约为2 m,这样的面积恰好能够容纳所需安装的仪器。它的高度为350 mm,高度设定主要考虑两方面的因素:(1)尽可能降低焦后仪器平台的重心;(2)随着高度变化而增加的弯曲度和扭转刚度之间的平衡。焦后仪器平台装载1台单色光成像仪、1台磁像仪、1个稳像和光分配系统以及1个波前改正系统。将这些相互独立的模块集成、安装和对齐后可以将它们置入焦后仪器平台的相应位置。将它们设计成相互独立模块的优点是每个模块可以在内部达到最大的刚度。这样一方面有助于尽可能减少焦后仪器平台内部因为重力负荷变化而产生的对准误差, 另一方面避免因为模块与平台之间不同程度的热膨胀导致的模块内部的机械张力,并能够使各模块之间的水平对准精度在所有方向上保持在 ±0.2 mm内。这个对准精度可以保证模块之间光学接口处的最大图像偏移量在容许范围以内,而模块相对于固定点的瞄准误差在所有方向控制在 3′ 以内。各个模块相对光瞳的位移量控制在光瞳直径5%以内,从而各仪器校准精度能够保持在 ±0.1 mm范围内。
图4展示了(a)焦后仪器装置图总览和(b)焦后仪器中的光路图。焦后仪器平台分别装载机械控制设备(Mechanism controllers)和波前改正系统、磁像仪和单色像成像仪、波前改正感知器电子元件设备(CWS prox. Electronics)和单色光成像仪相机电子设备(SuFI camera electronics),以及镶嵌在焦后仪器平台中并与各个装置接口兼容且负责光路稳定的稳像和光分配系统。图4(b)主要展示了焦后仪器中的光路图。光线从光学入口M4进入焦后仪器平台(见M4处的红色箭头指向的蓝色线),首先汇聚到第2焦点F2,然后经过斜置反射镜改变光路方向,一部分光线分配到单色光成像仪端口,另一部分光线分配到磁像仪和波前改正系统共同的端口处,再进一步将对应波段的辐射分配到磁像仪和波前改正探测器中。

图4 焦后仪器平台。(a)焦后仪器装置图总览;(b)焦后仪器中的光路图[20]Fig.4 The Postfocus Instrumentation Platform (PFI)[20]. (a) The overview of PFI; (b) Optical design in the PFI
焦后仪器平台的底端由两块10 mm厚的碳纤维增强型塑料复合材料拼接而成。它们一方面将焦后仪器平台上的设备组件与望远镜隔开,另一方面在保护焦后仪器平台组件时起到抗拉伸作用。总体来说,具有很高的刚度-拖曳比是焦后仪器平台结构的一个突出优点。采用碳纤维增强型塑料复合材料进一步保证焦后仪器平台的热膨胀最小,保证飞行过程中焦后仪器平台的几个模块在不同热载荷和机械载荷的情况下能保持光学准直。
焦后仪器平台内安装的相机和电子设备需要进行辐射冷却。平台内配备的散热器可以使相机镜头(工作温度在5~10 ℃)及附近的电子元件(工作温度低于45 ℃)在可接受的温度范围内工作。散热器尺寸和表面特性是综合考虑飞行情况和所需的工作温度并根据热性能分析之后确定的。焦后仪器的热性能设计还需要考虑热稳定性,要求在2 m长的仪器平台上的总温度(包括梯度)必须保持在20 ± 10 ℃的范围内。这一方面保证非碳纤维增强型塑料复合材料制成的仪器如磁像仪的准直保持不变;另一方面保证光学偏振特性的变化处于最低水平。
1.2.1 单色光成像仪
单色光成像仪提供紫波段和近紫外波段的成像观测资料,观测波段包括214 nm(透过带宽10 nm),300 nm(透过带宽5 nm),312 nm(透过带宽1.2 nm),388 nm(透过带宽0.8 nm)和397 nm(透过带宽0.18 nm)。单色光成像仪采用改造后的施瓦西显微镜(Schwarzschild Microscope)结构。施瓦西显微镜是紫外线显微镜中常见的一种,有很大的数值孔径并能够覆盖相当大的视场。
图5描述了从施瓦西显微镜原理图到单色光成像仪光学设计图的改造步骤。图5(a)可以看出,原始的施瓦西光学结构只利用镜面的一小部分。图5(b)中的设计对光路采用偏心离轴的改造,离轴是指使实物和最终所成的图像不在主镜的光轴上。在图5(b)光路的基础上,图5(c)在入射光束处加一个摆镜,将入射光的初始入射方向进行调整。这个摆镜是一个平面反射镜,也可以用作图像运动补偿器(Image Motion Compensator),主要用来补偿观测目标的运动,使其在成像平面上有一个稳定的图像。

图5 单色光成像仪的光学设计原理图[21]。其中,(a)施瓦西显微镜原始光路图;(b)偏心离轴光路图;(c)折叠式入射光路;(d)改造成功的光路图
对图5(c)中的光路图作进一步修改,得到单色光成像仪使用的光路(图5(d))。在此光路中,在成像之前的出射光路加一个双色分束板,分束板反射波长短于450 nm的辐射而允许波长超过450 nm的辐射透过。被选择的光束波长短于450 nm,从分束板中出射,通过两个滤光器和一个45°镜改变方向,并经过一个相位差图像倍增器,最后光束由CCD探测并成像。其中,加两个滤光器的目的是过滤杂散光。这主要是因为从分束板出射的紫外光强度相对于其它长波波段的光强度弱很多,也很容易被周围杂散光淹没。因此,为了避免单色光被杂散光污染,45°镜和相位差图像倍增器都封装在密闭空间里。
1.2.2 磁像仪
磁像仪主要在Fe I 525.02 nm波段(g=3)观测并获取偏振信息。偏振图像视场大小为50″ × 50″。观测主要在谱线Fe I 525.02 nm线心附近的几个波长点开展,并在一个接近连续谱的波长点进行偏振测量。这里的波长点是指波长偏离Fe I 525.02 nm线心一定带宽的观测点,比如常用的波长点为波长偏离线心±80 mÅ,±40 mÅ和+227 mÅ。时间分辨率可以通过观测的波长点数量(3到12)和不同的偏振状态数量(I,Q,U,V)调节。磁像仪还可以进行光谱观测,光谱分辨率为85 mÅ。光谱分辨率的调制和采样通过一个固态的F-P干涉仪(LiNbO3 Fabry-Perot etalon)完成。
磁像仪的光路及三维结构图如图6。光线从焦点F4入射磁像仪,首先经过前置滤光器。只有中心波长附近0.1 nm范围内的光通量进入前置滤光器,其余的直接送入光阱被全部吸收。尽管大部分紫外波段光子已经定向送到单色光成像仪光路[23],仍有部分紫外波段的光子残留在光束中,而前置滤光器可以保护液晶相位可变延迟器不受任何残留紫外光的影响。从前置滤光器出射的光束进入两个液晶相位可变延迟器,第一个延迟器的光轴(顺着进入磁像仪的光的方向)平行于分束器的一个线性偏振方向,第2个延迟器的光轴方向与第一个的光轴方向夹角为 45°。

图6 磁像仪光路图(上)和对应的三维结构图(下)[22]。为了便于理解,图中用字母将光路和三维结构中对应的仪器标注。在光路图中,(a)F4;(b)前置滤光器、两个延迟器;(c)45°镜;(d)灰色挡板;(e)准直镜;(f)F-P干涉仪;(g)前后两个透镜、分束器;(h)CCD终端;(i)45°镜和孔径光阑
偏振态的调制通过特定电压驱动延迟器实现。这两个延迟器组合在一起可以产生4个线性无关的偏振态[I1,I2,I3,I4](Np=4)或提供纵向偏振(Np=2)的I+V和I-V两个经典的偏振态。通过液晶相位可变延迟器的光线到达准直透镜并第1次通过热稳定外壳。这个外壳主要为其内部装置(LiNbO3 F-P干涉仪)提供温度稳定的环境。外壳前后两端各有一个熔融硅玻璃窗口。光线穿过位于热稳定外壳前端的窗口和安装在内部的F-P干涉仪并从后端窗口出射,紧接着遇到两个装有通光孔径光阑的45°镜,通过45°镜反射后再次穿过LiNbO3 F-P干涉仪。从LiNbO3 F-P干涉仪出射的光束依次通过双重照相、45°镜和分束器。分束器将光线分为相互垂直的两束光,一束送往CCD终端成像,一束通过相位差板后进入CCD成像。从液晶相位可变延迟器到分束器之间的光路中,光束的偏振态保持稳定不变。
现代偏振器(如Hinode/SP)主要通过高信噪比、快速偏振调制和双光束结构来保持高灵敏度。信噪比主要通过图像积累提高,是决定仪器光度和偏振信号灵敏度的关键参数。高信噪比能保证探测到望远镜观测能力范围内的最弱的光度强度δI和最小偏振度δp。科学界已达成普遍共识,检测宁静太阳网络内区域的弱偏振信号要求的最低信噪比为103。测量太阳表面弱磁场对仪器探测能力的要求很严格。针对太阳宁静区内的磁对流模拟给出的磁场强度分布表明,磁场强度从1 G单调增加到若干kG,探测强度为1 G的纵向磁场产生的偏振信号需要在足够短的时间内探测到大约2 × 107个光电子,而在这段时间内,磁场本身没有明显的变化。目前可用的CCD有大约105个电子的满阱,也就是说一次曝光只能探测到很少一部分光电子。于是,单次曝光不可能达到这些偏振灵敏度要求的光电子个数。在单次曝光中,现代太阳偏振计引入图像积累以增加光电子数,达到所需的偏振灵敏度或信噪比。该方案在最新的斯托克斯偏振仪上得到成功应用和推广[24]。磁像仪也采用这种实时增加曝光次数的方法将信噪比提高到约103。
对于光谱分析,磁像仪使用两个光学系统的组合:一个0.1 nm半高全宽的前置滤光器和一个双通LiNbO3 F-P干涉仪。这种干涉仪在过去已经应用于太阳物理学研究[11]。不过,干涉仪在磁像仪中使用的概念是新颖的。磁像仪光谱概念的基本原理如下:干涉仪内部有两个平行的镜面,当光线进入干涉仪,光线在两个镜面之间经历多次反射,每次反射形成的干涉在发射光束和反射光束之间形成调制。最后,从干涉仪出射的光在给定的波长处产生一系列强度峰值,形成光谱图。该仪器主要通过调制干涉仪镜面的反射率进一步调制仪器的谱线灵敏度,并通过提高信噪比来提高光谱分辨率。
1.2.3 波前改正系统
波前改正系统的主要部件是夏克-哈特曼(Shack-Hartmann)波前探测器、高速照相机(>1 kHz)和闭环控制计算机。它的主要功能是将夏克-哈特曼波前探测器测得的波前在传播过程中发生的畸变转换成电信号,并驱动快速摆镜(摆动速率1 700 Hz)和慢速副镜M2(摆动速率0.1 Hz)对波前发生的畸变作出相反方向的响应以抵消畸变。因此,波前改正系统主要有两方面的作用:(1)作为快速波前探测器导出控制信号,驱动摆镜作出调整抵消图像运动的动作;(2)作为慢速波前探测器,用于望远镜副镜的焦点主动对准控制。
1.2.4 稳像和光分配系统
“日出” 球载太阳望远镜对观测目标进行多波段观测时,一方面需要入射光保持稳定,另一方面需要将各个波段的光线精确无误地送到对应滤光器的位置。为了满足这两个条件,需要在焦后仪器平台上装载一个稳定可靠的稳像和光分配系统。稳像和光分配系统是一个复杂的光学装置,需要同时完成不同的任务:(1)负责稳定入射光束,为科学装置和波前改正系统提供稳定的入射光;(2)把特定波段光束从入射光中分离并送到对应的滤光器,同时将剩余的入射光输送到波前改正系统;(3)允许透过的光波波长范围覆盖不同仪器所需的波长,而这要求它能够在给定的位置和方向提供匹配的光学接口;(4)保证科学仪器在任何环境下都能够在衍射极限内正常工作;(5)将残余指向误差降低到特定的阈值以下,从而保证因残余指向误差导致的图像模糊不会影响图像质量。
1.3 吊舱工作台
吊舱工作台位于气球下方100 m处,有效载荷为1 919.6 kg,长和宽均为5.5 m,高为6.4 m,为望远镜、焦后仪器平台及电源等提供一个外罩,还负责为望远镜准确定向。吊舱工作台自动驾驶仪将望远镜朝向太阳的指向精度控制在 ±45″内,在这个范围内,波前改正系统与稳像和光分配系统能够补偿残余运动,使科学仪器持续平稳地观测。吊舱工作台的方向控制通过顶部的动量传递单元完成。电力由封装在望远镜左右两边的太阳能电池板提供,控制电力的仪器装在工作台后侧的支架上。两个数据存储器装载在工作台核心框架上部的桁架内部,为数据安全存储提供保护,便于着陆后数据的提取与恢复。吊舱工作台具有桶形外观,核心结构的组成材料为铝/钢管框架。它相对轻巧又能够提供所需要的刚度和足够高的特征频率(大于10 Hz)。这种结构可以将望远镜分为上下两部分,从而由两个U形组件构成,可以方便地集成科学仪器,并使望远镜的俯仰角范围控制在-5°~50°。
望远镜的方位角主要通过位于吊舱工作台顶部的粗调方位角电机和细调方位角电机控制。由于球载装置的上升过程是旋转上升的模式,粗调方位角电机主要负责将吊舱工作台从气球的旋转运动中解耦,细调方位角电机通过加速和减速反作用轮使吊舱工作台旋转到特定的方向。反作用轮的额定转速为10转每分钟(r/min)。电机的转动提供吊舱工作台旋转的转矩,提供转矩范围根据频率划分。 粗调方位角电机补偿转矩的频率范围在0.1 Hz以下,并能够长时间提供较宽范围的转矩。反作用轮补偿转矩的频率范围为0.1~1 Hz,只能在短时间内提供一定范围的转矩。
望远镜的俯仰角主要通过线性平移平台调整。线性平移平台是精确运动系统的组成部分,主要负责将物体限制在单个运动轴上运动。线性平移平台通过杠杆臂严密地连接到望远镜的中心框架,杠杆臂轻微的预加负荷可使俯仰角调整的迟滞最小化。在早期设计阶段,考虑包括转矩电机等几种俯仰角驱动模式,最后选择线性平移平台是因为它可以高精度地调节俯仰角,并能够在望远镜中心框架上不对称地加载负荷。由于可以高精度地调节俯仰角,线性平移平台驱动模式还可以作为望远镜发射和着陆时的锁死装置。
用于细调方位角的探测器固定在吊舱工作台顶部。作为定位望远镜方位角的中级分辨率器件,它的捕获方位角范围为 ±3°,用来定位望远镜俯仰角的中级分辨率器件可以在方位角为±5°、俯仰角为±15°范围内搜寻太阳。当太阳所处位置超过这个范围,全程高度仪会给出一个饱和信号,表示太阳在当前望远镜的最大俯仰角之上或之下。这两个探测器的精度都高于10″,高精度地跟踪太阳是由安装在望远镜前环上的洛克希德中级分辨率太阳探测器负责完成的,它的方位角和俯仰角调节范围均为 ±3°。当温度稳定且处于最低水平时,洛克希德中级分辨率太阳探测器对太阳的指向精度可高达1~2″。
2 飞 行
“日出” 球载任务的第1次飞行是2009年6月8日06:27 UT,从瑞典北部的柯茹纳(Kiruna)放飞至37.2 km高空,于2009年6月13日 23:47 UT降落在加拿大北部岛屿上。第2次飞行是2013年6月12日05:37:53 UT,从瑞典北部的柯茹纳放飞至37.1 km高空,于2013 年6月17日11:49:24 UT降落在加拿大北部岛屿上。在飞行过程中,吊舱工作台的指向系统首先开始运行。球载装置在上升期间,开启旋转模式。这种模式使得球载装置中的仪器得到光照并加热,指向系统可以在不同条件下调试参数。指向系统参数调试结束之后,吊舱工作台的指向系统在观测过程中能够非常稳定地指向太阳。
在热控方面,所有仪器的温度控制在正常范围内。例如,在焦后仪器平台上的光学器件和机械的温度保持在5~25 ℃,一些外部元件的温度变化范围在 ±10 ℃之间。温度变化的主要原因是望远镜的俯仰角变化和球载装置因地面地形变化导致仪器上接收的反照率通量的变化。反照率是指物体反射的太阳辐射强度与物体表面接收的太阳总辐射强度之比。
光学性能的好坏可以通过相关波前探测器测量到的波前质量、相位差和重建后的数据3个因素进行评价。在观测时,影响光学性能的主要因素是波前误差,而波前误差主要是由于白天光照下光学系统受热弹性形变,以及光学系统朝向相对于重力方向发生变化导致主镜和副镜相对位置轻微变化产生的。这种波前误差可以用相关波前探测器进行测量,并根据测量结果调整副镜的位置以减小波前误差。在飞行过程中,只是在闭环时对副镜位置进行微调(100 μm),从而调整焦点的位置。调整之前,这种轻微的离焦导致的波前误差为 ±0.5λ。相关波前探测器的灵敏度和副镜微调的精确度使得光路聚焦精度误差低于0.01λ[22]。相关波前探测器焦点位置和单色光成像仪的焦点对齐误差、相关波前探测器焦点和磁像仪焦点的对齐误差均在λ/20 范围内。在后期数据处理时发现,观测期间主要影响光学性能的不是波前误差和仪器中的光学器件,而是残留的图像模糊。图像模糊主要由运动图像的多帧叠加造成,导致单色光成像仪观测数据的空间分辨率降低到0.1″,磁像仪观测数据的空间分辨率降低到0.15~0.18″。
3 观测数据
“日出” 球载任务的两次飞行都获得了优质的数据。第1次飞行观测目标主要集中在日面中心的宁静区,第2次飞行观测主要集中在活动区。第1次飞行任务观测的数据主要分布在2009年6月9日、11日和13日3天时间里,其中包括214 nm, 300 nm,312 nm,388 nm和397 nm波段的单色光成像数据和525.02 nm波段的偏振数据,总的观测时间为130 h。单色光成像持续观测的最长时间段为34 min,在波长最短的214 nm处获得了19 min的观测数据,偏振观测最长持续时间为32 min。
图7展示了多波段观测数据重建后的单色像。第1排为日面中心宁静区(μ=0.72)的观测特征,其中在300 nm,312 nm和388 nm等波段处,观测结果均展示出清晰的亮米粒结构以及位于暗米粒通道的光球亮点。在214 nm波段对应的图像上,亮米粒边界没有之前在3个波段观测到的边界清晰,暗的米粒通道也不再清晰可见。图7(a)最左边的子图展示了在Ca II H 397 nm波段观测到的日面中心宁静区附近的特征,可以观测到清晰的暗米粒和亮米粒通道结构。这与光球波段观测到的亮米粒和暗米粒通道的现象完全相反,而在214 nm波段观测到的特征则是介于反转米粒和正常米粒之间的状态。图7(b)为日面边缘的观测特征,在日面边缘观测到很明显的针状体。

图7(a)自左向右分别展示了日面中心宁静区在波段397 nm, 388 nm, 312 nm, 300 nm, 214 nm的单色像。(b)自左向右分别显示了日面边缘在397 nm, 388 nm, 312 nm, 300 nm的单色像[15]
图8为IMaX偏振观测数据展示图。第1排分别为(a)连续谱图和(b)多普勒速度图。第2排分别是圆偏振Vs与线偏振Ls。它们分别定义为
(1)
其中,i=1,2,3,4为谱线Fe线心附近的几个波长点,αi=1,1,-1,-1。在接近连续谱的波长5 250.2Å + 227 mÅ附近的观测结果显示,米粒亮度对比度的均方根为13.5%,标志着获取了高质量的偏振图像。在图8(d)的Vs轮廓图中间的一块区域有较强的斯托克斯V偏振信号,这是一个网络区域。从图中可以看出,除了部分强磁场的网络区域,其余大部分区域是网络内区域,对应的磁场为混合极性磁场。根据斯托克斯V偏振信号得到的这些网络内磁元的尺度小于1″,而很多磁元的尺度接近望远镜的衍射极限(0.15″)。

图8 IMaX偏振观测数据展示图[15]。(a)连续谱图;(b)多普勒速度图;(c)Ls图;(d)Vs图(见(1)式)
“日出” 第2次球载任务共观测了122 h,单色光成像仪获取了300 GB数据(60 806幅图),磁像仪获取了68 GB数据(48 129幅图)。单色光成像仪的连续观测时间最长为60 min,磁像仪的连续观测时间最长为17 min。观测数据的像素分辨率根据波段的不同而有所变化,不过均在每像素0.019 83~0.020 69″的范围内。磁像仪同样采用了多种观测模式,其中主要观测模式为在谱线 Fe I 525.02 nm线心两侧一共8个波长点(与线心距离分别为 ±120 mÅ, ±80 mÅ, ±40 mÅ和+227 mÅ)处分别进行全斯托克斯参数的测量。观测数据时间分辨率为36.5 s,像素分辨率为0.055 46″,视场为51″ × 51″。
图9和图10分别展示了 “日出” 球载任务第2次飞行获得的观测数据经重建后得到的单色光和斯托克斯参数强度图。图9(a)为波长300 nm处的单色像,强度根据IQS做了归一化,这里的IQS是指在波长300 nm处观测到的宁静区平均亮度。图中可以很清晰地识别光球亮点、光斑、拉长的米粒等细节特征。图9(b)和图9(c)为线心(397 nm)处不同带宽的观测结果。尽管带宽不同,这两幅图展示的特征几乎一致。由于是在活动区附近进行观测,在位于低色球的Ca II H 397 nm波段上得到的图像展示了清晰的细纤维结构,而且它们的足点与图9(a)中的亮点位置相对应。
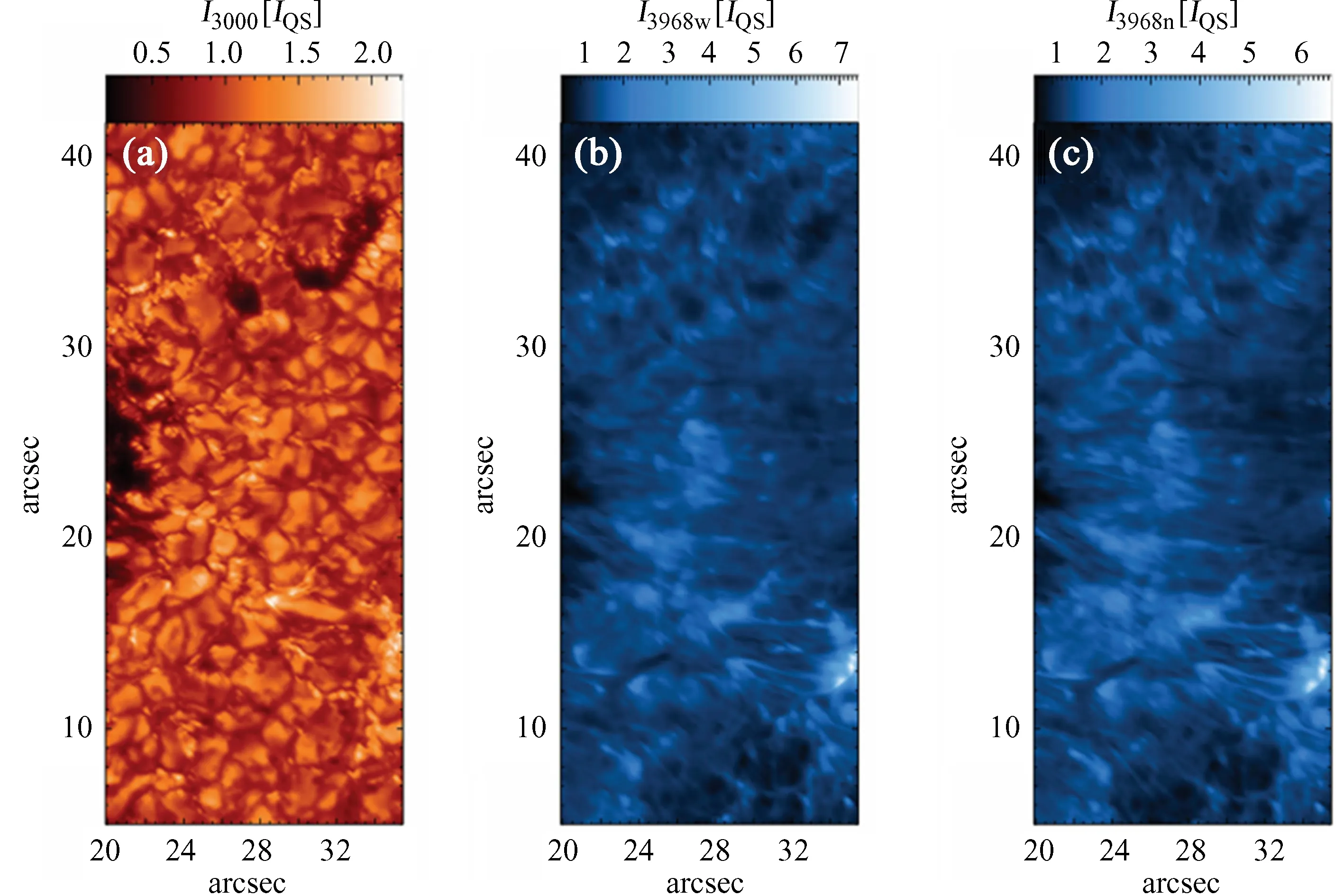
图9 在不同波段得到的单色像[17],相应的辐射强度已根据宁静太阳在300 nm处的辐射强度IQS做了归一化。(a)在波段300 nm处的单色像;(b)和(c)中心波长为397 nm透过带宽分别为0.18 nm和0.11 nm的单色像

图10 IMaX重建后的数据展示[17]。(a)在距离Fe I 525.02 nm线心 +227 mÅ处的连续谱图;(b)在谱线Fe I 525.02 nm线心处的强度图;(c)在距离谱线Fe I 525.02 nm线心 +40 mÅ处的斯托克斯I强度图;(d~f)分别为斯托克斯参数(Q, U, V)在距离谱线Fe I 525.02 nm线心 +40 mÅ处的强度图。所有强度值都相对于IQS做了归一化
图10(a)~(c)分别展示了距离谱线Fe I 525.02 nm线心 +227 mÅ,+0 mÅ,+40 mÅ 处观测到的活动区特征;图10(d)~(f)分别展示了在波长Fe I 525.02 nm + 40 mÅ处得到的斯托克斯参数Q,U,V对IQS归一化后的强度分布图。图中可以识别活动区的细节,比如气孔、拉伸的米粒、黑子内部的本影、亮桥、少许半影结构以及本影亮点等特征(见图10(a)~(c))。在图10(a)中,米粒和本影亮点轮廓非常清晰,而与本影亮点对应的是图10(f)中在相同位置增强的斯托克斯V信号。这意味着本影亮点处汇聚着较强的纵向磁场,而在本影亮点的周围没有这么强的斯托克斯V信号。由此可以看出在黑子本影中的磁场并不均匀,存在很多尺度更小,包含较强磁场的磁通量管。
4 科研成果
“日出” 第1次飞行任务的观测目标主要集中在日面中心的宁静区。观测任务获得的科学成果主要是小尺度磁场的浮现、磁通量管与米粒之间的相互作用、磁通量管的位形和特征以及波的传播等,获得了多项新的、目前地基望远镜难以探测到的观测结果。比如研究人员利用这次球载任务获得的数据首次观测到磁通量管,首次观测到磁通量管与米粒之间的相互作用,首次通过多波段观测确定了日面中心宁静区的磁通量管从光球到色球的倾斜角度,首次观测到随着米粒元胞一起浮现的小磁元伴随的强蓝移信号,最后这个发现被他们解释为光球磁重联的结果。第2次飞行任务的观测目标主要集中在日面中心附近的活动区,所获得的科研成果主要是活动区附近的磁浮现、磁对消、移动磁特征、强磁场延伸到色球层形成的细纤维结构等。
两次飞行任务均获得了高质量的数据和丰硕的科研成果。第1次飞行任务的观测目标是日面中心附近的宁静区,以对流运动和小尺度磁场活动为主。观测目标主要有米粒、位于米粒通道内的亮点、发生在米粒通道里的涡旋运动,以及位于米粒元胞上小磁元的浮现活动等。它们的主要特点是尺度小、寿命短,对观测设备的空间和时间分辨率要求极高。下面我们首先介绍第1次飞行任务获得的研究成果:
(1)首次利用高分辨率手段观测到千高斯磁场强度的磁通量管。文[25]对 “日出” 球载任务观测的斯托克斯数据进行了反演,偏振数据的空间分辨率高达0.15~0.18″。通过选取3个磁场强度分别为100 G,500 G和1 000 G的区域,分析它们在光球层底层、中层和高层的温度分布,发现千高斯的磁场区域随着高度增加,温度逐渐超过周围环境的温度,而另外两个弱磁场区域没有明显的温度变化,由此认为该网络区域是由一个包含千高斯强度的磁通量管组成的强磁场区域。 文[26]构建了细磁通量管的三维磁场位形,并计算出细磁通量管从光球层延伸到低色球层发生膨胀和倾斜后与其最初延伸方向所形成的角度平均为14 ± 6°。文[27]发现磁通量管的水平移动速度和其内部由此产生的纵向扰动速度有90°的相位延迟,暗示了磁通量管小尺度的水平移动可以在内部产生纵波。
(2)首次发现紫外波段亮点的亮度对比度高达2.31。文[28]研究了在紫外和可见光波段观测的亮点的亮度对比度,从而考察了亮点对太阳辐照的贡献。研究发现亮点在紫外波段214 nm处观测的亮点的平均亮度对比度高达2.31,而在其它波段观测的亮度对比度依照观测波段(300 nm, 312 nm, 388 nm, 396.8 nm和525 nm)顺序分别为1.52, 1.35, 1.60, 1.89和1.11。文[29]发现太阳宁静区在紫外波段214 nm处的亮度对比度比其他波段都高,达到了32.8%。 利用同样的数据,文[30]研究了视向磁场强度与在不同波段上辐射强度的关系,发现不同波段的辐射强度与对应的磁场强度服从不同的对数函数关系。
(3)发现随米粒一起浮现的小尺度磁元以及伴随该磁元浮现的超声速蓝移现象。文[31-32]研究了米粒元胞内部的偏振信号,发现一个米粒元胞中有超声速的蓝移偏振信号。米粒元胞的浮现率为1.3 × 105arcsec-2·s-1,面积约0.046 arcsec2,持续时间为80 s。另外,这些以超声速运动的偏振信号在随米粒浮现的同时,也伴随着相反磁极偏振信号的浮现。他们进一步发现这些事件发生时往往伴随相反极性磁场的出现以及谱线蓝移和红移的出现。由此推断这很有可能是极性相反的磁场发生了磁重联[33]。文[34]研究了一个磁场伴随着米粒浮现的事例,这个新浮现的磁场刚开始有约100 G的强度并占据了米粒的顶端,然后随着米粒的分裂而分裂。在这之后一个相反极性的磁场也浮现出来,两者在米粒通道汇聚。文[35]发现对流运动中,等离子体下沉区域的密度为6.7 × 10-2Mm-2。该区域往往出现在中米粒边界交汇处,且伴随强的纵向磁场。通过事例分析发现等离子体下沉区域约40%的面积存在纵场强度高于500 G的磁场结构。文[36]发现米粒边缘发亮,而且发亮的结构从米粒边缘向中心移动,发亮的结构离开米粒边缘后,米粒边缘变暗,暗的结构随着发亮的结构做同样的移动。用数值模拟发现这种现象是米粒间隙中扭缠的磁通量管与米粒的碰撞造成的。
(4)研究并更新了有关米粒通道里的涡旋运动数密度的结论。文[37]发现涡旋运动数密度为3.1 × 10-3Mm-2·min-1。“日出” 获得的高空间分辨率偏振和成像数据使得检测到的涡旋运动数量是之前用其它观测设备得到结果的1.7倍。他们观测到的涡旋运动持续了7.9 ± 3.2 min,并且还发现在同一个位置发生好几次涡旋运动;同时这些涡旋运动一部分是顺时针旋转的,另一部分是逆时针旋转的。
(5)研究了线偏振信号强的区域与横向磁场的关系。文[38]选取线偏振信号很强的区域并对它们进行跟踪,发现这些线偏振信号强的区域中横场出现的频率密度为7 × 10-4arcsec-2·s-1,是之前其它观测获得结果的1~2倍[39-42]。这些强的线偏振信号的寿命和面积没有明显的规律,且往往出现在米粒边缘。它们中大多数有红移现象,只有个别的在整个寿命中只有蓝移现象。文[43]进一步研究了宁静太阳的线偏振特征。当信噪比高于4.5时,整个研究区域的26%覆盖线偏振信号,且线偏振区域占研究区域面积的10%。它们出现的频率密度为8 × 10-4arcsec-2·s-1,尺度约为0.1″~1.5″,寿命在30~300 s,磁场强度约几百高斯,水平移动速度约为1.2 km·s-1。这些线偏振区域在红移和蓝移区均匀分布,且亮度对比度比周围没有线偏振特征的区域高。文[44]发现多普勒速度变得很强之前约84 ± 11 s能够观测到线偏振信号,大约80%的强多普勒信号出现在新浮现磁场与已存在磁场之间的中性线附近。他们认为这种强的多普勒信号是新浮现磁场和已存在磁场之间磁重联的结果。不过,另外20%并没有表现出与已存在磁场很靠近的特征,他们认为这20%强多普勒信号所在区域的磁场结构可能没有明显的几何分布特征。
(6)发现磁扩散导致磁通量以指数曲线的规律衰退。文[45-46]分析了一个偶极磁元从浮现到消失的过程,并计算出偶极磁元拥有的磁通量为6 × 1017Mx,浮现率为2.6 × 1015Mx·s-1。在偶极磁元演化过程中,偶极磁元的偶极轴(偶极磁元之间的连线)方位角发生90°的变化。他们认为该偶极磁元存在一定程度的缠绕,在偶极磁元衰退期间,它们的足点一方面分裂成更小的磁元并与周围的磁场发生磁对消,另一方面发生磁扩散加速衰退。他们发现磁扩散导致磁通量以指数规律衰减,并且计算的扩散系数(8 × 102km2·s-1)与磁通量输运模型中的大尺度磁扩散的扩散系数一致。文[47]发现圆偏振数据获取的磁结构的形状有周期性形变的特征。他们注意到磁通量稳定的磁结构面积振荡周期和米粒寿命相当,并推断这种振荡是米粒对流运动对它的挤压造成的。他们还发现在一个米粒附近的3个磁结构有同相位的振荡,意味着振荡可以发生干涉,使振幅增加到1 600 km。
(7)研究了磁场结构在太阳大气不同高度上的能量释放过程,认为能量释放主要发生在低层大气。文[48]利用SDO/HMI和SUNRISE/IMaX的磁图为边界条件,模拟了磁场结构及演化,并研究了能量释放过程发现,能量的释放主要发生在高度低于2 000 km的低层大气层。因此,他们认为色球磁场或许在日冕加热问题上扮演着重要角色。
(8)研究了宁静区低色球亮点的基本特征。文[49]计算了这些色球亮点的水平速度、等效直径、强度和寿命等参数,发现色球亮点的平均等效直径为0.2″,这与文[50-51]通过分析、研究1 m新真空太阳望远镜的光球观测资料[52]获得的光球亮点的尺度相当。文[49]还发现色球亮点的水平运动速度为2.2 km·s-1,平均亮度为背景亮度(
“日出” 的第2次飞行任务主要针对活动区附近尺度小、演化时间短的磁场结构,比如黑子附近的磁浮现和磁对消、小尺度强磁场结构在活动区上方形成的纤维状结构等,而活动区中如黑子、气孔等强磁场汇聚的区域有尺度大、演化时间长等特点的磁场结构,则不是此次主要的观测目标和研究对象。第2次飞行任务的主要科研成果有:
(1)第1次通过高分辨率观测对Ca II H波段观测的细纤维结构进行研究。文[55]通过外推和数值模拟的方法重建了在Ca II H波段观测的细纤维结构的磁场位形,发现这些细纤维结构的足点扎根在磁场聚集的区域,而细纤维的顶端与数值模拟中的小尺度磁环的位置重叠。文[56]统计研究了38个细纤维结构,发现他们的平均宽度为180 km,长度为500~4 000 km,平均寿命约为2 000 s(约33 min)。文[57]发现这些细纤维结构有速度为2.4 ± 0.8 km·s-1、周期为83 ± 29 s的横向振荡。这些振荡向上传播的相速度为9 ± 14 km·s-1,传播的能量约为15 kW·m-2。文[58]对细纤维结构在宽度和亮度的扰动进行的研究发现,细纤维结构的宽度和亮度扰动的周期分别为32 ± 17 s和36 ± 25 s,对应的传播速度分别为11 km·s-1和15 km·s-1。他们认为宽度和亮度扰动很可能是快腊肠模波传播造成的。
(2)第1次通过高分辨率观测获得磁结构多波段振荡和运动特征。文[59]对在波长为300 nm的连续谱和波长为396.8 nm的Ca II H谱线上同时间共空间观测的磁结构振荡过程进行了分析,发现位于光球层的亮点和在低色球层与之对应的磁结构的振荡相位差揭示有沿着亮点所在磁通量管向上传播的高频振荡(频率高达30 MHz)。他们也观测到向下传播的振荡和驻波,通过估算得出在两个波段的磁结构的高度差约为450 ± 100 km,并进一步估算出沿着磁结构所在的磁通量管传播的横波和纵波的相速度分别为29 ± 2 km·s-1和31 ± 2 km·s-1。
(3)更精确地外推出活动区光球到色球中层之间的三维磁场结构。文[60]利用球载太阳望远镜第2次飞行观测的磁场数据作为磁静态模型的边界条件,外推出活动区光球到色球中层之间的三维磁场结构。得益于偏振观测数据非常高的信噪比,他们通过偏振测量获取的横向磁场数据确定线性磁静态模型中的自由参数。偏振观测的高空间分辨率允许他们获取光球到色球中层之间大气的非无力场磁场模型。
(4)研究了磁浮现过程。文[61]计算了磁浮现率。他们通过跟踪磁通量在1015~1018Mx范围的磁浮现,发现这些磁浮现发生的频率为1 100 Mx·cm-2·d-1,而磁通量小于1016Mx的单次磁浮现对增加太阳大气磁通量的贡献最大。文[62]研究了活动区的一个偶极磁浮现事件。当通过偏振数据发现磁浮现时,位于上空的低色球层有对应的磁场结构伸展。这个过程展示了磁浮现过程中磁场与周围的米粒相互作用的细节,展示了将光球层等离子体拖拽到上方的磁场结构中的过程。磁场结构上的等离子体形成一个物质流通道,等离子体沿着通道下落到磁场结构足点,位于磁场结构上的等离子体由于重力将磁场结构位形固定,而磁场结构在不停地振荡。最后,磁重联导致磁场结构发生变化,使得磁场结构的一部分延伸至高层大气层。这个过程释放的能量加热了暗条物质,并使其发亮。
(5)研究了磁对消现象。文[63]通过将日出球载任务第2次飞行获得的磁场数据与太阳动力学天文台同时刻获得的数据相结合,研究发现冕环扎根在光球层中偶极磁场较明显的区域,并且该区域中的小尺度磁场不断发生磁对消。在这个过程中,他们发现在低色球层出现倒Y型喷流,由此进一步推论发生在太阳低层大气层的磁对消或磁重联很可能是日冕层中物质和能量的重要贡献者。这些磁环一般扎根在具有混合磁场极性的区域。文[64]研究了活动区附近的11个磁对消事件,他们发现这11个事件过程中的磁通量衰变率在3.3 × 1015~0.24 × 1015Mx·s-1,并进一步将这11个事件分为两类:① 已经存在的磁场结构与新浮现的磁场结构之间的对消;② 两个均已经存在光球表面的磁场结构之间的对消。共有6个事件属于第1种类型,5个事件属于第2种类型。对于第1种类型,对消过程中多普勒速度先蓝移,后红移,第2种类型则一直是红移。他们认为,对消事件有可能是部分磁场沉没或者磁重联导致的磁场沉没。
(6)研究了出现在气孔附近的运动磁特征。文[65]研究了一个气孔附近的运动磁特征,发现它们的尺度在亚角秒水平,并且远离气孔。与气孔极性相同的运动磁特征的远离速度为1.3 km·s-1,而与之极性相反的运动磁特征的远离速度为1.2 km·s-1。他们由此认为与气孔极性相同的运动磁特征以更快的水平速度远离气孔。他们进一步发现,与气孔极性相同的运动磁特征并没有表现出明显的红移或者蓝移,而与之极性相反的运动磁特征有明显的蓝移。
(7)文[66]对比研究了在Mg II k和Ca II H两个波段观测到的活动区的异同。两个波段对应的透过带宽分别为0.48 nm和0.11 nm。当活动区以及活动区上空发生耀斑时,这两个波段观测到的特征很相似。不过,Mg II k波段获取的观测数据在亮度对比度上比Ca II H的高1.4~1.7倍,并且图像更模糊和平滑。尽管Mg II k的曝光时间更长(是Ca II H曝光时间的100倍),但这并不能作为两者观测特征亮度对比度存在差异的唯一解释。亮度对比度差异的原因还有可能在于两条谱线不同的形成高度。
(8)文[67]将第2次飞行观测到的埃勒曼炸弹与数值模拟的结果进行了对比分析。数值模拟揭示了该事件发生时的复杂物理过程以及观测对这些物理过程和现象反映的局限性,也就是仅凭这些观测数据还不能确定磁重联发生的具体高度。
通过分析研究 “日出” 两次飞行任务得到的观测数据,一共获得24项科学成果。在这些成果中,第1次飞行任务的研究成果主要涉及对小尺度磁场结构的研究,第2次飞行任务的成果主要集中在对活动区附近的磁场结构的研究,比如,磁浮现和磁对消,活动区磁场结构,低色球层的细纤维结构等。这些研究成果的意义表现在技术发展和科学研究两方面。在观测技术发展方面,这些成果可帮助确定考察太阳低层大气小尺度磁场结构所需要的空间和时间分辨率,还可为今后更大口径太阳光学望远镜的研制和相应科学目标的制定提供重要参考;在科学研究方面,这些成果可为深入研究在太阳低层大气小尺度磁场的基本特征、磁浮现、磁对消、对流运动与小尺度磁场之间的相互作用、波的激发和传播、太阳大气辐射特征等提供丰富的信息,也可为解决太阳低层大气能量转换和传输以及太阳磁场的起源等重要科学问题提供观测依据。
5 总结与展望
“日出” 的仪器装置复杂且精度极高,它主要有以下几个突出特点:
(1)大口径望远镜装置。在距离地面37 km的平流层,望远镜的观测不受地面大气的影响,因而没有因视宁度起伏带来的干扰。大口径望远镜能够在接近衍射极限水平的情况下开展高分辨率多波段观测,而且能够在近紫外波段进行高分辨率观测,这是当前地面大口径望远镜不可企及的优势,“日出” 也因此获取了目前国际上在太阳低层大气高分辨率多波段观测方面最优秀的观测资料。
(2)优异的光学性能。“日出” 有着复杂的光学路径。为了同时满足多波段成像观测、偏振成像观测和光谱观测以及高精度跟踪等不同要求,球载装置中的稳像和光分配系统通过摆镜来稳定光束,通过分束器将不同波段精准地分配到相应的光学接口并满足对应光学接口的要求。波前改正系统通过测量波前变形的程度并将测量结果提供给稳像系统,使得摆镜可以高精度补偿光路抖动,从而保证光路的高度稳定。
(3)高精度跟踪太阳的能力。对太阳的跟踪采用粗调和细调方位角探测器相结合来确定太阳的方位角并将精度保持在 ±3°范围内。全程高度仪可以在方位角为 ±5°范围内确定太阳的俯仰角并将精度保持在 ±3°范围内。当方位角和俯仰角的定位精度都保持在 ±3°时,洛克希德中级分辨率太阳探测器进一步将方位角和俯仰角的精度定位到1~2″。最后通过稳像系统稳定光束,光束稳定精度可高达0.04″(rms)。
(4)持续稳定的热控制能力。球载装置从地面飞到平流层,从夜晚无光照到白天暴露在太阳下,承受的热辐射不同。光学器件在受到不同强度的辐射时很容易损坏和变形,进而导致仪器和光路对准精度下降。因此,保证球载装置中的仪器能够在持续稳定的温度下工作非常重要。焦后仪器平台的热控要求在任何情况下能够将温度稳定在20 ± 10 ℃的范围内。在观测时,对望远镜主镜周围的热控非常重要。位于第1焦点处的楔形表面涂层可以反射来自主镜99%的辐射,并通过光阑将第1焦点附近接收的辐射功率控制在10 W左右。位于主镜后环的3个档热板负责反射来自地面的反射光,从而起到保护主镜的作用。
(5)高刚度、低重量、低膨胀系数的支撑材料。负责连接望远镜主镜和副镜以及焦后仪器平台的材料、封装焦后仪器平台的各种板材均具有刚度高、重量轻、膨胀度低的特点,能够保证这些框架在不同的重力负荷、不同的热环境下不发生变形,而重量低的特点也减轻了球载装置的负重压力。
(6)高分辨率偏振/光谱观测能力。位于焦后仪器平台的磁像仪利用快偏振模式,即使用了两个液晶相位可变延迟器,采用图像叠加和双光束偏振相结合的方法也能够使偏振灵敏度达到0.1%。重建后的偏振数据空间分辨率为0.15~0.18″,磁场纵向分量测量精度可达4 G,横向分量测量精度可达80 G。获取的视向速度的误差范围为5~40 m·s-1。在光谱观测方面,一个窄带前置滤光器和一个双通道F-P干涉仪组装在一起进行光谱观测,使得光谱分辨率高达85 mÅ。
(7)高分辨率成像能力。观测波长越短,望远镜获取的光强度越弱,而且,短波段特别是紫外波段的光很容易被污染。为了获取紫外波段的高分辨率成像观测,在经过光分配系统将特定波段的光分配到成像仪之后,入射光须经过两个滤波轮以消除特定观测波段以外的杂散光。通过两个过滤轮之后,在CCD成像之前的光路封装在一个管道里,以防止紫外光被其它光线污染或被噪声淹没,这样,多波段成像观测可以获取接近衍射极限水平的空间分辨率。
“日出” 球载任务的两次科学观测获得的科研成果同样非常显著。两次科研成果分别集中在日面中心宁静区小尺度磁场和日面中心活动区小尺度磁场以及磁场结构的研究上。这些研究成果凸显了一个重要问题,即日冕加热、 磁场起源等基本物理问题的解决,要求更大口径的太阳光学望远镜在优秀的视宁度甚至无视宁度环境的优质观测条件下获取太阳大气精细结构。“日出” 球载太阳望远镜的两次飞行无疑是成功的,也非常具有借鉴意义。目前,我国在球载太阳望远镜和空间太阳望远镜方面仍是空白,我国发展球载太阳望远镜的必要性和迫切性非常明显,这不仅是太阳物理发展的需要,也是我国太阳物理研究所处国际地位的客观要求。另外,通过球载太阳望远镜高分辨率观测,可为进一步解决日冕加热、探索太阳爆发活动的物理本质和规律打下基础,也为我国未来星载望远镜的发展提供参考和借鉴。
2018 年上半年,中国科学院启动了 “临近空间科学实验系统” 项目,简称 “鸿鹄专项”。“鸿鹄专项” 搭建 “重载浮空器、持久驻空超压浮空器、可复用动力浮空器、球载临近空间太阳能无人机系统、临近空间中高层科学探测平台”等实验平台,“旨在刻画临近空间天气,探测电磁环境、 辐射环境, 开展临近空间科学研究”。该项目于2019年5月13~6月7日成功完成了生物大气载荷综合验证试验中的飞行平台、各科学载荷、预设轨迹等所有飞行操作和试验科目。2019年7月至8月, “鸿鹄专项” 完成了首次飞行实验,这恰好是发展我国球载太阳望远镜一个良好的契机。
中国科学院云南天文台承担 “鸿鹄专项” 中的 “日冕仪临近空间搭载实验” 子课题的研究任务,结合日冕仪和球载太阳望远镜的优势,针对下列目标开展观测研究:
(1)大尺度的日冕物质抛射结构和传播过程。
(2)观测日冕中电流片的精细结构,检验和改进已有的太阳爆发模型。
(3)利用近紫外谱线Mg II k 279.6 nm和Mg II h 280.3 nm对太阳高色球的辐射检测,开展对太阳爆发过程和太阳低层大气磁重联等重要活动的诊断,开展光学波段到射电波段对太阳活动的监测。
本文旨在为我国球载太阳望远镜的发展,特别是中国科学院云南天文台承担的 “日冕仪临近空间搭载实验” 项目提供有价值的参考资料。
