激光通信旋转双棱镜系统误差对指向精度的影响
2021-07-14高世杰刘永凯宋一诺
邱 赛,盛 磊,高世杰,刘永凯,宋一诺
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033;2.中国科学院大学,北京100049)
1 引 言
在激光通信指向系统中,通信双方通常采用捕获、跟踪、瞄准(Acquisition,Tracking,Point⁃ing,ATP)技术建立并保持通信链路[1-3]。传统的ATP系统由于使用了万向式指向机构,其体积和质量普遍偏大,不能较好满足空间激光通信需求;旋转双棱镜系统则具有体积小、扫描范围大、对载体振动不敏感、动态性能好等优势,更适用于空间激光通信环境[4-8]。然而,旋转双棱镜系统存在多项误差,这些误差严重影响出射光束的指向精度[9-13]。为分析误差对光束指向的影响,本文展开对旋转双棱镜的误差分析与研究。
目前,旋转双棱镜的研究多针对旋转双棱镜的解算方法和扫描方式展开。周远等人[6-7]采用光束矢量传播方法推导了光束指向模型,但该指向模型未考虑系统存在的误差源。李锦英、Warger等[8,14]研究了旋转双棱镜的扫描方式,旋转双棱镜有多重扫描方式可扫描全视野,不同扫描方式具有不同的扫描优势。Horng等[15]仅研究了轴承和楔形倾斜对最终指向的影响,其误差研究仅限于几个固定角度,其他角度未分析。ZHANG等[16]研究了轴承倾斜角随机误差与棱镜倾斜角随机误差对最终指向结果的影响,也仅限于几个固定角度下的误差研究与分析。
本文全面分析了对最终指向有影响的指向偏差,将对指向偏差影响相同的误差源归为一类,一共有4类误差,分别为棱镜楔角误差、入射光误差、棱镜转角误差和棱镜倾斜角误差。采用求偏导法求出出射光束指向偏差与各误差间的变化关系,根据各个误差的测量精度计算出它对出射光束指向偏差的影响。根据误差合成理论计算出射光束的总偏差,并用实验验证本文的误差分析结果,对后续的误差补偿与修正具有一定的参考价值。
2 工作原理与误差源
2.1 旋转双棱镜工作原理
旋转双棱镜系统中,两块棱镜采用背靠背方式进行排列;两块棱镜耦合可改变光束光程,进而改变光束指向。旋转双棱镜原理如图1所示。

图1 旋转双棱镜原理Fig.1 Schematic diagram of risley prism
2.2 旋转双棱镜误差源
旋转双棱镜系统由激光器、两块旋转棱镜、两个电动旋转台和靶面等部分组成。激光器发射激光束至旋转棱镜П1,经旋转棱镜П1折射,其出射光束进入旋转棱镜П2折射,其出射光束即为旋转双棱镜系统的出射光束。旋转双棱镜光束出射端放置相机作为靶面,相机获取出射光斑位置,经计算得到出射光束偏转角Φ和方位角Θ。旋转双棱镜的总体构成如图2所示。

图2 旋转双棱镜系统结构示意图Fig.2 Schematic diagram of risley prism system
3 误差指向模型建立
首先建立坐标系,以棱镜П1的直角面中心为坐标原点O,与光轴重合为Z轴,以激光源发出的光束传播反方向为正向;Y轴垂直于水平面,竖直向上为正向;X轴与Y轴和Z轴为右手定则关系,其坐标系如图1所示。
本文参考非近轴光线建立指向模型的方法,基于折射定律,采用光线矢量传播方法建立光束指向模型,光线矢量传播如图3所示。
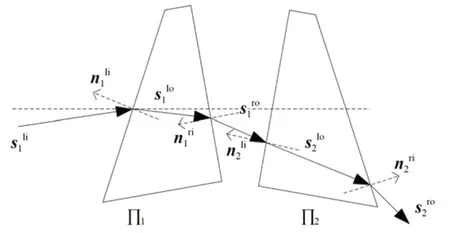
图3 光线矢量传播图Fig.3 Ray vector propagation illustration

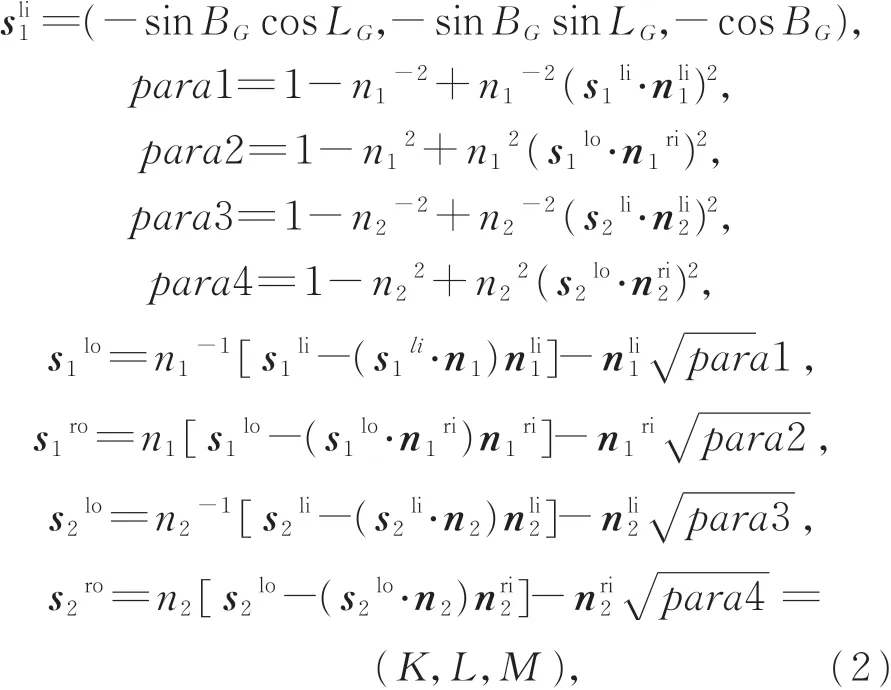
棱镜П1斜面法线矢量为,棱镜П1直角面法线矢量为,棱镜П2直角面法线矢量为,棱镜П2斜面法线矢量为,那么有:其中:α1,α2分别为棱镜П1,П2的楔角;由于存在误差,棱镜П1光轴对理想光轴存在倾斜角,此倾斜角可用偏转角B1和方位角L1描述;棱镜П2光轴对理想光轴存在倾斜角,棱镜П2的倾斜角可用偏转角B2和方位角L2描述;θ1,θ2分别为棱镜П1,П2的转角。
出射光束偏转角Φ与方位角Θ分别为:

4 误差分析
旋转双棱镜指向模型包含4大误差,分别为棱镜楔角误差、入射光误差、棱镜转角误差和棱镜倾斜角,各自的误差范围可由检测设备获得。在求偏导分析某一误差时,其余误差均取其精度为误差设定值进行误差分析,误差源精度及其设定值如表1所示。

表1 误差源精度及其设定值Tab.1 Error source accuracy and its set value
4.1 棱镜楔角误差分析
旋转双棱镜指向模型中包含出射光束偏转角Φ,Θ与棱镜楔角α1,α2的关系式。根据指向模型 分 别 计 算Φ,Θ对α1,α2的 偏 导 数,如 式(4)所示:
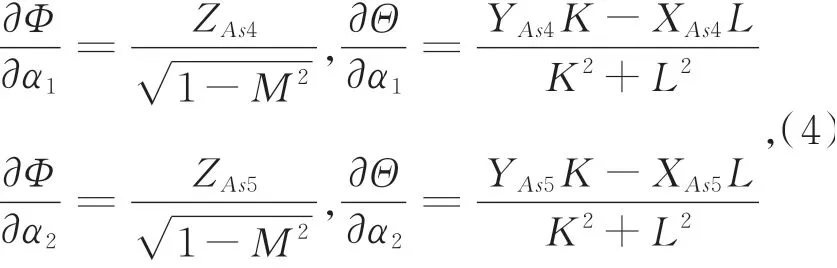
其 中:(X As4,Y As4,ZAs4),(XAs5,Y As5,ZAs5)分 别 为向量As4,As5的三维坐标,由式(5)得到;K,L,M为出射光束的方向余弦,由式(2)可知。

本文采用逐层求导获取XAs4,Y As4,ZAs4的具体计算公式。例如,在求对α1的偏导数As4时,将对α1的偏导数设为As3,然后再求As3,逐级往下求偏导;An1为最低一级的求偏导,An1可直接计算得出,最低一级的公式求偏导均可直接计算得出。求XAs5,Y As5,ZAs5的过程与XAs4,Y As4,ZAs4的求解方法相同,均由出射光束s2ro往入射光束方向逐级求导。
对指向影响的计算公式如下:

其中Δα1,Δα2分别为α1,α2的精度。由表1可知,由于中心区域误差较大,因此选定中心3°以内的区域为内指向区域,中心3°以外的区域为外指向区域,分两个区域进行分析。由于外指向区域误差占95%以上,故本文仅分析外指向区域的误差数据。棱镜楔角误差对指向结果的影响如图4所示。为便于对比分析,具体误差数据仅在表2中阐述分析。
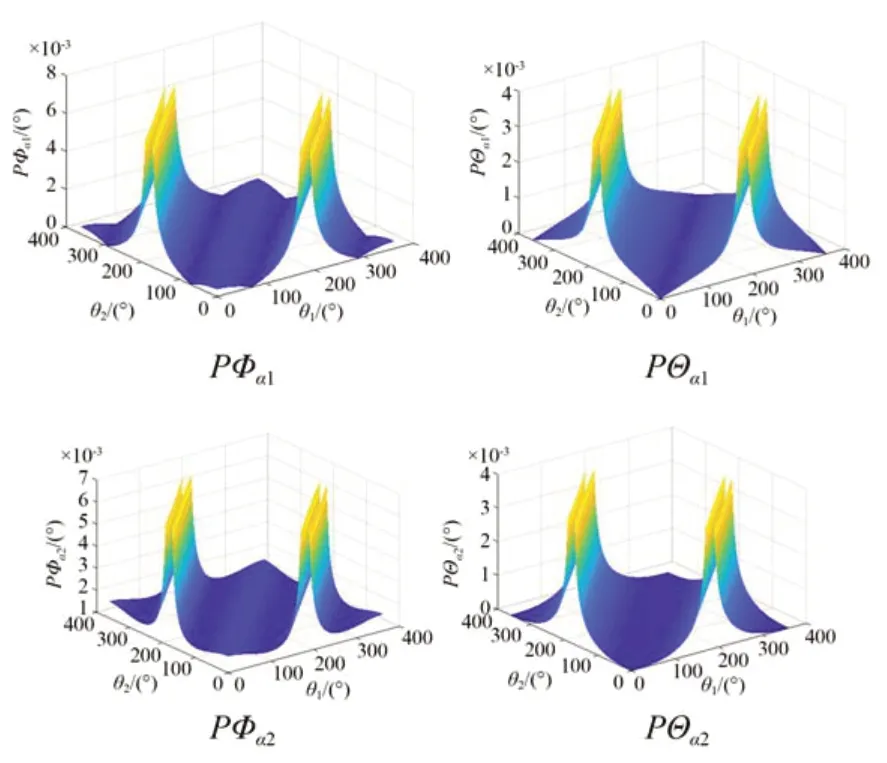
图4 楔角误差对指向结果的影响Fig.4 Influence of wedge angle error on pointing result
4.2 入射光误差分析
旋转双棱镜指向模型中包含出射光束偏转角Φ,Θ与入射光倾斜角BG,L G的关系式。根据指向模型分别计算Φ,Θ对BG,L G的偏导数,如式(7)所示:


X As9,Y As9,Z As9,X As13,Y As13,ZAs13的求解方法与X As4,Y As4,Z As4的相同,均由出射光束往入射光束方向逐级求导。
对指向影响的计算公式如下:

其中ΔBG,ΔL G分别为BG,L G的精度,由表1可知。入射光倾斜角误差对指向结果的影响如图5所示。为便于对比分析,具体误差数据仅在表2中阐述分析。

图5 入射光倾斜角误差对指向结果的影响Fig.5 Influence of inclination angle error of incident light on pointing results
4.3 棱镜转角误差分析
旋转双棱镜指向模型中包含出射光束偏转角Φ,Θ与棱镜转角θ1,θ2的关系式。根据指向模型分别计算Φ,Θ对θ1,θ2的偏导数,如式(10)所示:
其 中,X As17,Y As17,ZAs17,X As18,Y As18,ZAs18由 式(11)得到:
XAs17,Y As17,ZAs17,X As18,Y As18,ZAs18的求解过程与X As4,Y As4,ZAs4的相同,均由出射光束s2ro往入射光束方向逐级求导。
对指向影响的计算公式如下:

其中Δθ1,Δθ1分别为θ1,θ2的精度,由表1可知。棱镜转角误差对指向偏差的影响如图6所示。为便于对比分析,具体误差数据仅在表2中阐述分析。

图6 棱镜转角误差对指向偏差的影响Fig.6 Influence of prism angle error on pointing deviation
4.4 棱镜倾斜角误差分析
旋转双棱镜指向模型中包含出射光束偏转角Φ,Θ与两棱镜倾斜角B1,L1,B2,L2的关系式。根据指向模型分别计算Φ,Θ对B1,L1,B2,L2的偏导数,得到:

其 中XAs22,Y As22,ZAs22,XAs26,Y As26,ZAs26,X As28,Y As28,ZAs28,XAs30,Y As30,ZAs30由式(14),式(15)可知。


X As22,Y As22,ZAs22,XAs26,Y As26,ZAs26,XAs28,Y As28,ZAs28,XAs30,Y As30,ZAs30的求解过程与X As4,Y As4,ZAs4的,均由出射光束s2ro往入射光束s1li方向逐级求导。
对指向影响的计算公式如下:


其中ΔB1,ΔL1,ΔB2,ΔL2分别为B1,L1,B2,L2的精度,由表1可知。
棱镜倾斜角误差对指向结果的影响如图7所示。为便于对比分析,具体误差数据仅在表2中阐述分析。

图7 棱镜倾斜角误差对指向结果的影响Fig.7 Influence of prism tilt angle error on pointing result
上述误差的误差均方根与最大误差如表2所示。由表2可知,对出射光束偏转角Φ影响最大的误差因素为入射光偏转角BG误差、棱镜П2旋转角θ2、偏转角B1、方位角L1、偏转角B2、方位角L2;对出射光束方位角Θ影响最大的误差因素为转角θ2、方位角L1、偏转角B2和方位角L2。在进行设计、安装和标定的过程中,需要特别注意控制入射光偏转角BG误差、棱镜П2旋转角θ2、棱镜П1对理想光轴的倾斜角的偏转角B1和方位角L1、棱镜П2与理想光轴倾斜角的偏转角B2和方位角L2。

表2 误差均方根与最大误差表Tab.2 Root mean square and maximum errors
综上所述,对出射光影响较大的因素为棱镜П1与理想光轴的倾斜角(即B1,L1)、棱镜П2与理想光轴的倾斜角(即B2,L2)、棱镜П2转角(即θ2)。
根据误差合成理论计算光束理论指向总偏 差,得到:

光束理论指向总偏差如图8所示。MAT⁃LAB仿真表明,理论指向总偏差最大值为0.362 0°,理论指向总偏差均方根为0.0470°。

图8 理论指向总偏差Fig.8 Theoretical pointing total deviation
5 实 验
5.1 旋转双棱镜实验平台
本实验搭建了旋转双棱镜实验平台,如图9所示。该平台主要由激光器、两块旋转棱镜、齿轮系统、步进电机、相机、上位机和系统支架组成。激光器发射激光束,激光束经过两块棱镜耦合偏折后照射在相机靶面,相机与上位机共同处理光斑图像获得光斑位置。上位机控制电机转动,电机通过齿轮系统带动棱镜转动。电机内置编码器,实时检测电机位置。

图9 旋转双棱镜实验平台Fig.9 Risley prism experiment platform
5.2 指向误差实验分析
由于相机视场角不够大,本文采用视野拼接技术获取全部指向范围内的光斑位置,实验测得的指向总偏差如图10所示。采用MATLAB分析理论指向总偏差与实际指向总偏差,MAT⁃LAB分析结果如表3所示。在MATLAB分析结果中,理论指向偏差最大值为0.362 0°,理论指向偏差均方根为0.047 0°。实验表明,在99.54%的指向区域中,实验偏差最大值为0.356 3°,小于理论指向偏差最大值0.362 0°,实验偏差均方根为0.023 3°,小于理论指向偏差均方根0.047 0°,实验结果均小于理论分析结果。由图10可知,实验结果没有超出理论分析结果,本实验证明了理论分析的合理性。
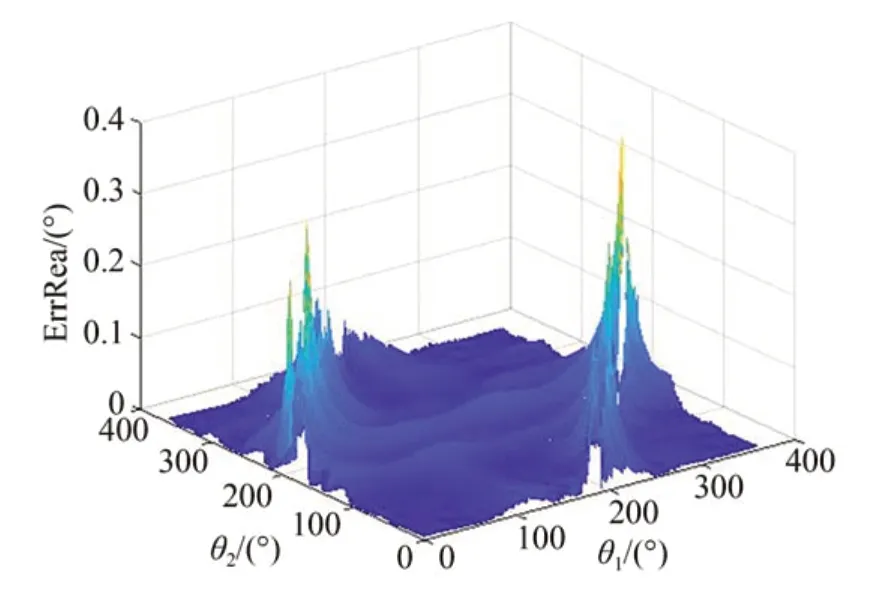
图10 实验指向偏差Fig.10 Experiment pointing deviation

表3 理论指向总偏差与实际指向总偏差的MATLAB分析结果Tab.3 MATLAB analysis result of theoretical and actu⁃al total deviations
6 结 论
本文采用光线矢量传播原理建立旋转双棱镜系统光束指向模型,根据该模型,采用求偏导方法计算出射光束指向偏转角和方位角对各个误差的偏导数,并以各误差源的精度范围为输入计算误差源对指向结果的影响。仿真分析得出,对出射光影响较大的误差源包括棱镜П1对理想光轴的倾斜角、棱镜П2对理想光轴的倾斜角及棱镜П2转角。根据对各误差源的分析与仿真结果,本文采用误差合成理论计算各主要误差源对光束指向的总偏差。仿真计算结果表明,理论指向偏差的最大值为0.362 0°,均方根为0.047 0°。桌面实验结果表明,在99.54%的指向区域中,实验偏差的最大值为0.356 3°,均方根为0.023 3°,均小于仿真计算值。这一结果表明本文对旋转双棱镜系统误差的分析较为准确,对旋转双棱镜平台的设计和补偿修正有一定的参考价值。
