某小型水下滑翔机控制系统浅析
2021-07-13郑达邹光灿
郑达 邹光灿

摘要:本文针对小型水下滑翔机控制系统的组成、工作原理、工作过程进行了研究,形成了一个控制水下滑翔机姿态控制的有效方法。
引言
水下滑翔机是一种新型水下机器人。借助改变自身浮力和重心在水下做滑翔运动,具有航行阻力小、能源利用率高、航行距离大、噪声低、回收方便等优点,在海洋监测与探测领域发挥着重要作用。本文针对小型水下滑翔机控制系统的研究。
1 功能及组成
1.1 功能
本控制系统主要完成水下滑翔机的姿态控制,具备滑翔机的潜伏、俯仰、偏航控制以及无线数据收发、传输、指令下达、远程数据传输、系统状态自动检测等功能,完成滑翔机的水下滑翔动力驱动与姿态调节控制,达到预定滑翔运动控制要求。
1.2 组成
本控制系统主要由岸上控制终端、下位机控制系统两部分组成(系统构成图如图1所示)。
其中岸上终端主要由控制计算机及相关辅助器件设备组成。上位控制终端为滑翔机与操作人员的人机界面。岸上控制终端主要通过无线串口、北斗一代/铱星系统、在线测试电缆三中不同的连接方式同滑翔机系统的下位控制系统建立联系,实现数据的收发、检测与控制。
下位机控制系统主要由中心控制器和相关的外围辅助控制电路、传感器、执行器件等组成,完成航行器浮力调节控制、航行器俯仰控制、滚转控制以及安全应急抛载控制。控制系统包括通讯接口电路、控制器、驱动电路、直流电源、复位电路、外围驱动器等组成。
2 系统工作原理
电气控制系统分为上位机和下位机两部分,上位机通过无线串口(铱星数据通讯传输/北斗导航定位卫星的数据短报文功能)、有线数据通讯电缆实现与下位控制器通讯,完成系统指令传输与数据交换。
下位机主要完成上位机所发送指令的执行控制,下位机工作原理如下图2所示。
3 控制系统技术要求
控制系统设计技术要求如下。
1)控制系统动态工作功率:≤10W(控制器本身,不计算外围电磁阀等用电器件功率);
2)静态功耗:≤3W;
3)系统动态响应时间:≤100ms;
4)数据输入接口:标准CAN2.0/RS232/无线串口;
5)浮力调节电机控制数字信号输出:保证电机转速控制在600~3500转之间可调;
6)重心调节电机开关量输出,控制1台24V直流电机正反转;
7)重心调节位移控制精度误差累计:≤0.3mm;
8)横滚控制电机开关量输出,控制1台24V直流电机正反转;
9) 横滚调节角度控制精度误差:≤0.1°(角度范围为±60°,对应姿态角最大:±35°,姿态角的角度控制为闭环控制,采用编码器作为信号反馈传感器);
10)电磁阀线圈通断控制继电器触点负载能力IW≥3A(24VDC);
11)伺服电机电源通断继电器负载能力:IW≥15AP(48VDC);
12)浮力调节控制精度:≤0.05L或浮力调节能力的1%FS(取小值);
13)控制系统连续无故障工作时间不低于1年,控制系统工作寿
命不小于3年;
14)岸上控制终端连续供电工作可靠性不低于1年,工作寿命不低于3年。
4 系统工作过程概述
控制系统由滑翔机控制系统和岸上指挥控制系统(上位机)两部分组成。滑翔机控制系统主要完成滑翔机的滑翔动力驱动控制与姿态控制。通过控制浮力调节电机泵完成系统的浮力调节控制、完成下潜滑翔机和上浮滑翔、水面漂浮通讯三个工作状态。为保证航行器在滑翔过程的姿态满足预定滑翔姿态控制要求。
岸上指挥控制系统(上位机)主要完成滑翔机与操作员的人机界面交互,实现航行器工作路径规划、航行状态边界条件设定、系统状态检测、航行状态数据检测、下位机软件更新升级等控制工作。
4.1 滑翔的三个阶段
滑翔的三个阶段为水上布放作业、滑翔工作、回收工作三个阶段。
4.1.1 布放阶段
布放主要是完成滑翔机启动、状态检测、滑翔参数设定、任务装载、水面遥控调试、航行起点位置标定等。
4.1.2 滑翔阶段
滑翔工作阶段滑翔机按照预定设定的目标位置、滑翔最大深度、滑翔周期个数或结束滑翔条件等约束开始滑翔。滑翔机启动后滑翔机开始进行减小浮力操作开始下潜滑翔,当滑翔机下潜到水下0.5米深度以下時,滑翔机根据北斗卫星水面获取的航行器位置信息与目标航行终点之间的角度关系调整航行器的自身姿态使得航行器航向与目标航行方向一致,并稳定在相应状态(调整到位后横滚角度回归零位),当航行器姿态再次发生于目标航行方向有较大偏差时再次调整航行器横滚姿态进行航向修正,直到满足设定航行器航行方向为止。当航行器航行回归到设定航行方向横滚姿态调节系统应回归到零横滚角度状态,继续滑翔。航行器下潜滑翔过程中,当航行器下潜到水面以下1米以后,航行器的天线与通讯关闭。当航行器达到设定最大下潜转换深度时,航行器开始增大浮力调节操作,直到达到设定增大浮力的上限为止。滑翔机开始上浮滑翔,在此过程中当航行器与目标方位角偏差超过允许值界限时,系统自动调节横滚姿态以进行方位修正,当修正到目标范围内时,系统的横滚姿态控制再次回归零位继续上浮滑翔,直到水面。
当航行器上浮滑翔到水面下1米深度时航行器的各个天线重新启动工作,与岸上控制系统建立联系,并将当前接受的GPS位置信息发送给岸上控制系统终端,同时滑翔机自动更新当前起点位置信息。滑翔机与岸上控制系统完成数据交换后,在规定时间周期内如果没有新的任务变更,滑翔机再次进入新的滑翔工作周期。
4.1.3 回收阶段
回收工作阶段则是根据最后的报告位置进行滑翔机的回收工作,回收阶段主要通过无线串口近距离进行人为干预操作,配合回收设备及平台进行滑翔机的打捞回收。并对滑翔机内计数据进行下载和分析整理,回收后进行状态检测测试。
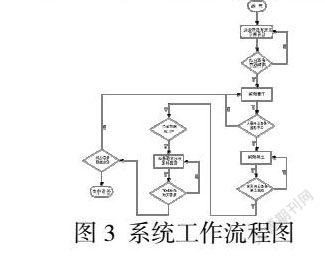
5 系统工作流程
水下滑翔机滑翔的整个工作流程,主要完成水下滑翔机的姿态控制,具备滑翔机的下潜、上浮、偏航控制,具体流程如图3。
结论
本文通过滑翔机的滑翔特点,提出了一种针对滑翔机的姿态控制方案,通过研究完成滑翔机的水下滑翔动力驱动与姿态调节控制的效果,达到预定滑翔运动控制要求。
参考文献
[1]陈强.水下无人航行器技术.北京.海潮出版社.2007
