基于LabVIEW的航空发动机导流叶片虚拟调试技术
2021-07-05李煦阳杨俊坤
李煦阳, 马 克, 程 波, 杨俊坤
(成都飞机工业(集团)有限责任公司,四川 成都 610073)
航空发动机压气机导流叶片偏转角度的性能调试是一项特别重要的工作,压气机导流叶片偏转角度直接影响发动机的进气空气流量[1-2];如果压气机导流叶片偏转角度不能快速、准确、稳定地调节,将直接影响发动机的性能,严重时会发生叶盆或叶背气流分离,进而引发喘振[3],直接影响航空发动机试车安全和飞行安全。
目前,国内外航空发动机控制器较多采用机械液压控制器[4]。机械液压控制器技术成熟,可靠性高,特别是引入三维凸轮等计算装置[5],使机械液压控制器功能也比较强大,能够生成复杂控制指令完成高性能控制任务。但是机械液压控制器结构非常复杂,控制系统的调节精度比较低;而作为航空发动机控制系统的主要发展方向,采用高权限的数字化自动控制系统,以及基于神经网络构架的高自主度自动控制系统[6],可以提供比机械液压控制方式更为精确的控制,且在应对发动机复杂工况下的系统工作参数应变调节时,系统自身也具有相较于机械液压控制方式更好的鲁棒性,但该控制方式仍依赖于机械作动机构、电磁控制阀门等执行部件完成控制的最终反馈。
不论是采用何种控制方式,均很有必要对航空发动机运行时压气机导流叶片偏转角度进行实时监控,并对导流叶片偏转角度偏离理想指令曲线的发动机进行及时调整。传统的调整方法是基于人工经验现场调试,即进行多次发动机试车迭代调试,消耗大量燃油和发动机额定工作小时数,为此,有必要开发一种能实时监控发动机导流叶片偏转角度性能特性的方法和工具。
虚拟仪器技术[7]是近年来发展迅速的一种直观高效的测控解决方案,随着计算机软硬件的不断发展,虚拟仪器已经具有了非常强大的可开发性和可扩展性,被广泛应用于工业测控和实验室研究中[8]。其中,由NI公司出品的图形化编程软件LabVIEW是使用最广泛的计算机虚拟仪器编程语言[9],它具有直观、生动、界面友好、功能强大、兼容性好等众多优点。在国内,南昌航空大学的陈松林[10]曾利用LabVIEW系统开发了针对旋翼系统的试验数据采集与处理软件。李文等[11]则在LabVIEW环境下进行了电机噪声测试系统研究。
近年来,在不可直接测量的特殊过程及状态、复杂结构或环境下的工程实施中,更多地采用基于LabVIEW的虚拟调试技术向实现图形可视化、简易化、仿真化的方向发展,如李丁成等[12]利用虚拟仪器测试航空发动机高速轴承试验机,通过远程测控实现了对试验人员的安全保障。胡伟等[13]以虚拟调试技术完成了机载产品模拟机上环境的各项复杂条件测试。基于该思路,从航空发动机压气机导流叶片调试执行难度大的工程实际出发,以LabVIEW 2017为软件开发平台,对飞参数据[14]进行二次开发,设计了航空发动机压气机导流叶片偏转角度显示、分析、调试系统,并通过多次试车实测数据加以验证,与传统方法相比较,能够更高效地满足航空发动机导流叶片偏转角度性能特性的监控和调试需求。
1 控制系统介绍
典型的航空发动机导流叶片偏转控制规律特性[5]如图1所示。
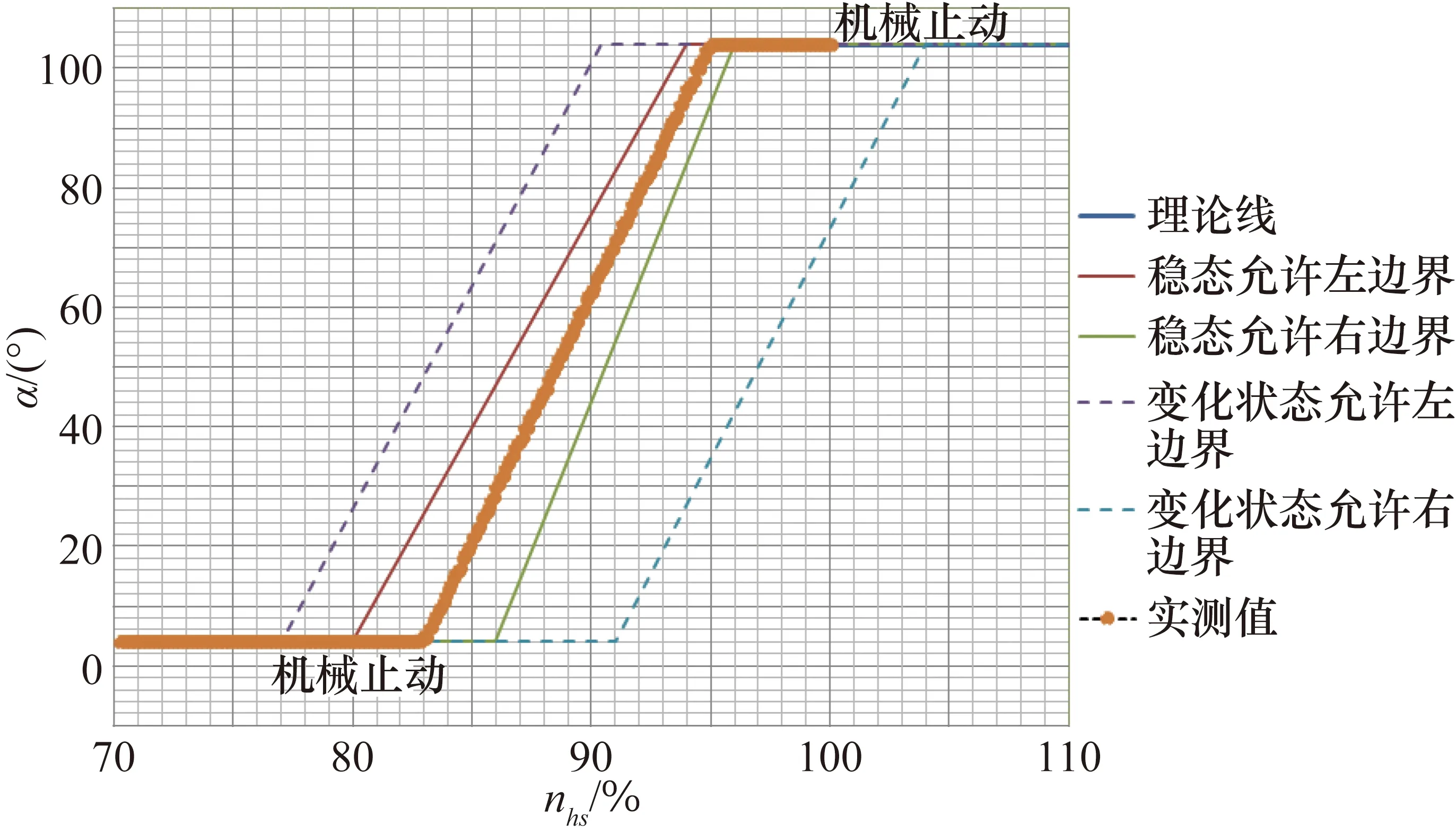
图1 导流叶片偏转角度控制特性

典型的航空发动机导流叶片偏转机械液压控制系统如图2所示。
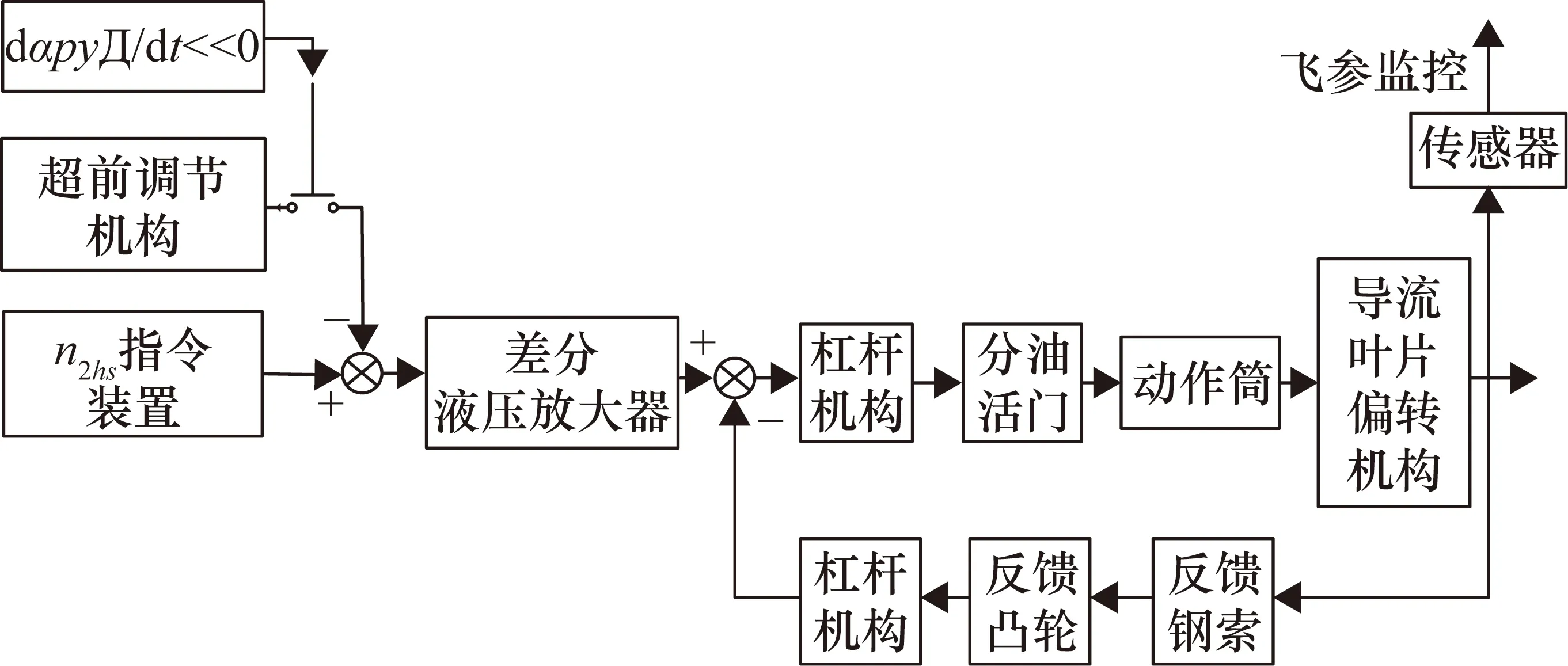
图2 导流叶片偏转角度控制系统
由图2可知,控制系统分为指令生成部分和闭环负反馈控制部分。排除采集系统误差情况,在发动机运转时,压气机导流叶片实际偏转角度偏离理论线,原因可能来自于稳态时控制指令本身偏离理论线,变化状态即动态调节过程超调量过大或控制系统输出端受扰动所致。有必要对发动机运行时压气机导流叶片实际偏转角度进行监控,并根据实际情况进行及时调整。这里选取某典型航空发动机,其压气机导流叶片偏转角度遵循上述机械液压控制系统,在发动机机械液压控制器上设置有特性调整螺钉,命名为D1、D2,可以在发动机技术条件允许的调整范围转动一定圈数,分别按设计规律调整稳态和动态偏转指令,需要特别指出的是,动态工作过程随着时间推移会逐渐收敛到稳态工作过程,所以稳态指令是基础,调整时应首先调整稳态过程再调整动态过程。
2 调试方法
根据发动机重要参数如油门杆位置和转速来定义稳态工作过程和过渡态(动态)工作过程,将发动机运行时压气机导流叶片实际偏转角度飞参数据进行分类,以确定需要调整的工作状态是稳态过程或动态过程。
其次,根据实际运行的实测值与理论线之间的归一化广义距离计算调整量实现自动调试或通过直接手动调试给出调整量。
定义发动机稳态过程为dg/dt≤c1且dn/dt≤c2,g、n、c1、c2、t分别为油门杆位置、压气机物理转速、门限值常数和工作时间定义值。对于常规结构的航空发动机,其各稳态下油门杆角度均限定在特定的角度范围内,而对应于不同稳态时,航空发动机工作均保持恒定,表征其主要工作性能的压气机物理转速即在其控制系统给定的上、下限值范围内自动调节变化。如某航空发动机,其在慢车状态下的高压压气机物理转速就由其控制系统限定在(70±2)%,超出该状态要求的油门杆角度值或压气机物理转速值均会导致发动机脱离当前稳定工作状态[15]。
定义压气机导流叶片偏转角度函数关系:动态允许左边界、右边界分别为αdl=f(nhs)、αdr=f(nhs);稳态允许左边界、右边界分别为αwl=f(nhs)、αwr=f(nhs);理论线为α=f(nhs)。
定义m是每次试车采样点数,则压气机导流叶片实际偏转角度实测值为(nhsi,ααi),i=1,2,…,m,ααi为nhsi对应的理论线值。
定义pwl、pwr、pdl、pdr分别是稳态工作过程实测值左、右偏离理论线和动态工作过程实测值左、右偏离理论线的程度。
发动机稳态工作时,实测值(nhsi,ααi)向左右偏离理论线的程度由式(1)、式(2)给出。
(1)
(2)
发动机处于动态工作过程,实测值(nhsi,ααi)向左右偏离理论线的程度由式(3)、式(4)给出。
(3)
(4)
定义pw1=(pwl+pwr)和pw2=|pwl-pwr|,分别表示稳态工作点的分散程度和偏离理论线程度。同理定义动态参数pd1=(pdl+pdr)和pd2=|pdl-pdr|,分别表示动态工作点的分散程度和偏离理论线程度。
在该调试方法中,D1、D2调整螺钉分别代表了通过发动机控制系统对发动机稳态、动态工作状态时压气机导流叶片偏转角度特性的人工修正干预深度,调整D1螺钉的目的是使式(1)、式(2)取得最小值,即表征实际稳态压气机导流叶片偏转角度值的总集偏离叶片偏转性能理论线的最小欧氏几何距离;同理,调整D2螺钉的目的是使式(3)、式(4)取得最小值,即达到动态下该项偏离的最小距离值。基于此方法,虚拟仪器的构建算法可通过数次迭代运算检索,获取D1、D2调整螺钉旋转角度变化时,达成发动机一次全状态全周期工作过程内的压气机导流叶片偏转角度值的总集与理论线间最小欧氏几何距离所需的最低旋转角度变化值。
基于上述思路,建立了虚拟调试方法,其实现步骤为:根据工程实际情况,以每次调试c3圈为步长,c3可视为某一指定类型的航空发动机执行压气机偏转角度调试时调节机构允许实际调整的最小控制精度,当在该允许范围内调试时,首先虚拟调试D1,并搜寻调试过程min(pwl+pwr)对应的D1位置作为最终调整位置。D2调试方法与D1类似,只是虚拟调试的步长不一样。
其后,执行调试效果验证,根据虚拟调试后的D1最终位置指导实际调整、试车,并计算式(1)~式(4),且用虚拟仪器直观显示虚拟调试结果与实际调试结果的重合程度以及与理论线的重合程度。
3 虚拟调试实现
以发动机稳态工作过程为例,应用LabVIEW语言编写虚拟仪器,读取发动机运行后录取的飞参数据集中压气机导流叶片实际偏转角度,对其进行监控,并在虚拟仪器上进行虚拟调试,模拟实际调试过程,并通过试车验证虚拟调试效果。实际发动机运行过程中,压气机导流叶片偏转角度实测值可能偏离设计理论线较严重,如图3所示。
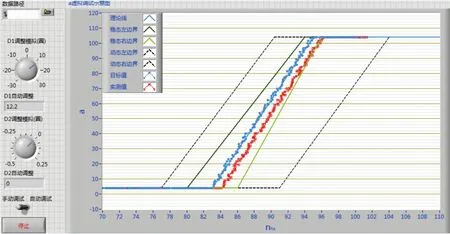
图3 实测值偏离理论线虚拟调试示意图
如图3所示,发动机运行时压气机导流叶片实际偏转角度实测值已明显偏离理论线,且大转速状态已有工作点超出稳态右边界允许范围,所以必须对其进行调整。可以通过图中虚拟仪器进行虚拟调试,然后指导实际调整。基于图3中给出的偏离程度与偏离方向,将稳态虚拟调整螺钉D1以手动方式旋转(沿顺时针方向转动)12圈,即可得到比较满意的导流叶片偏转角度目标值分布,据此可将发动机导流叶片偏转角度控制系统D1调整钉顺时针转动12圈,试车验证如图4所示。
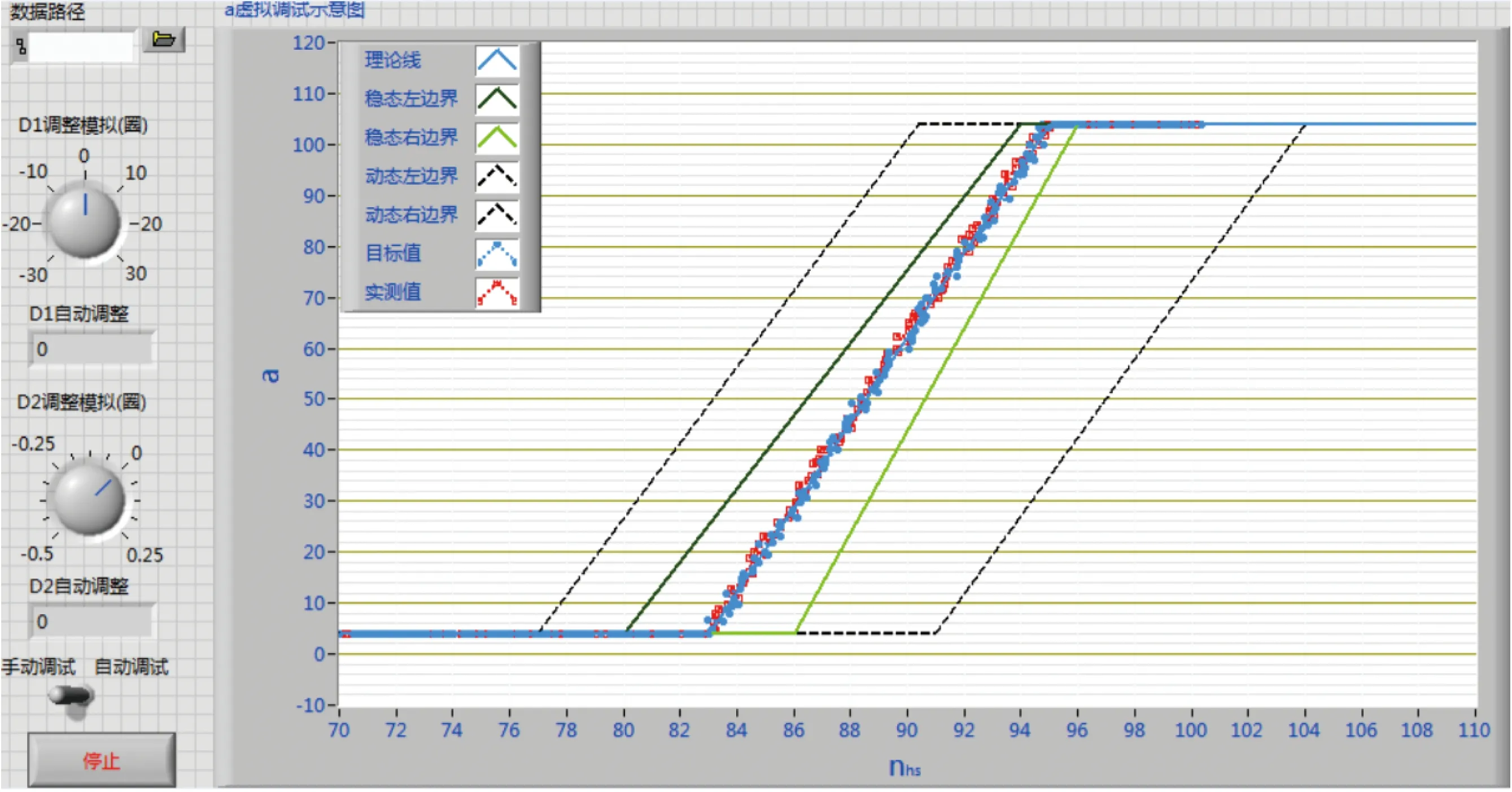
图4 手动调试目标值与调整后试车实测值对比
由图4可以看出,根据虚拟调试指导,进行实际调试,实测值与虚拟调试值分布高度重合,在各个稳定转速段都均匀分布在理论工作线周围,能保证发动机安全高效工作。
需要指出的是,图3、图4只展示了虚拟仪器实现手动调试的功能,还可以进一步计算优化,实现自动调试,图5为自动调试结果。
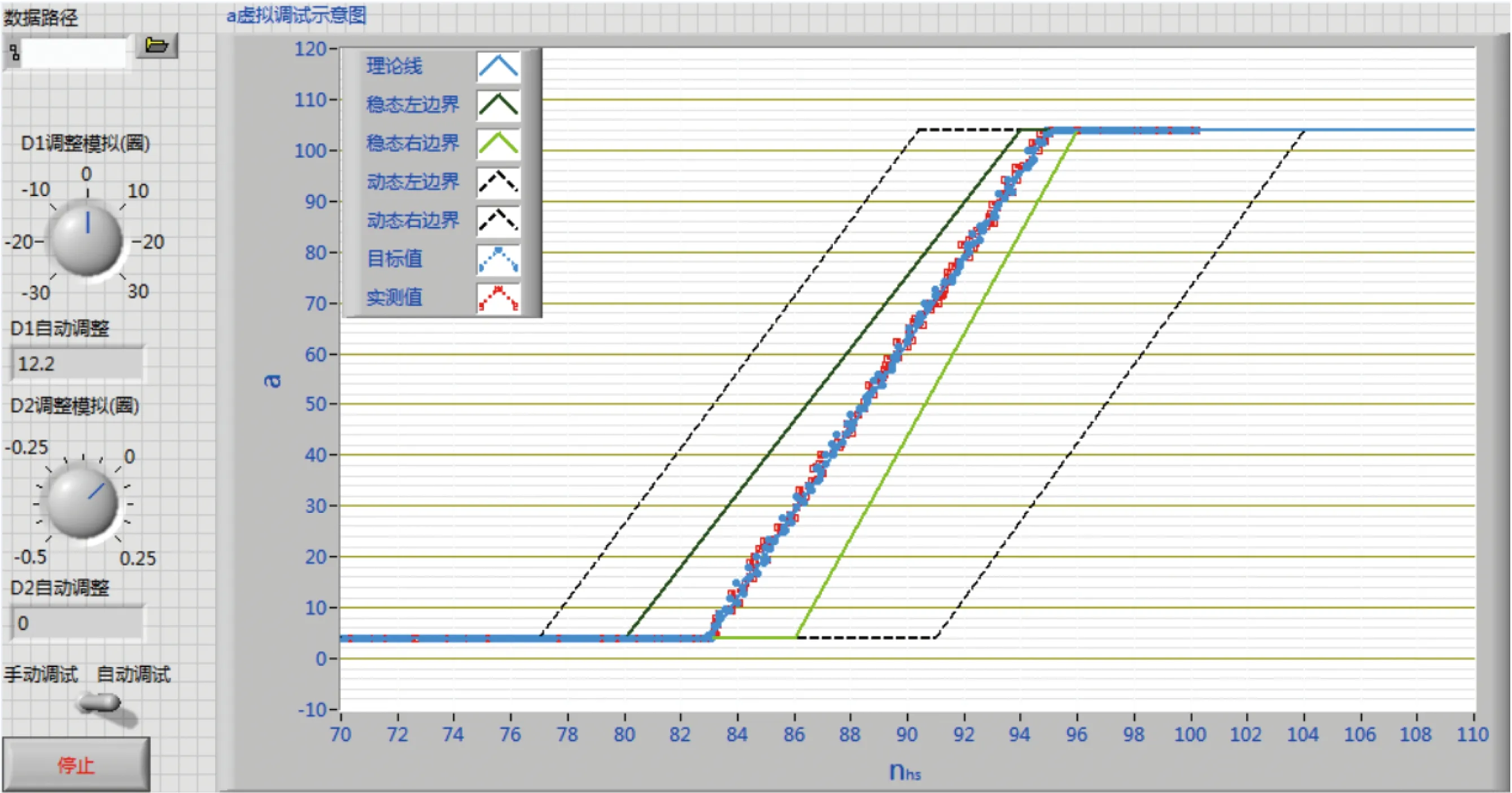
图5 自动调试目标值与调整后试车实测值对比
由图5可知,自动调试根据式(1)~式(4),且以步长c3=0.1,最终计算出12.2圈虚拟调试圈数,与手动调试结果相近。根据自动调试计算出的值调整发动机,试车后实测值与虚拟调试值均与理论线高度重合,能保证发动机安全高效工作。
需要注意的是,对于工程实际中的发动机调试,由于各种型号发动机在控制方式、调节机构上的差异,自动调试得出的调节程度并不能真实反映实际发动机上的调节机构工作情况;反之,各种型号发动机上调节机构的调节精度也不尽相同,虚拟仪器所提供的手动与自动调节结果给工程实际中如何实施具体的调节介入提供了有效参考,可满足更复杂条件下的发动机实际调节需求。
此外,当发动机导流叶片偏转角度输出端有干扰时,例如随着工作时间增加,在传动机构、执行机构铰链等出现随机卡滞时,虚拟仪器监控的导流叶片偏转角度会比较分散,需要做维护工作,图6、图7显示了发动机导流叶片偏转机构清洗润滑前后的工作性能特性。
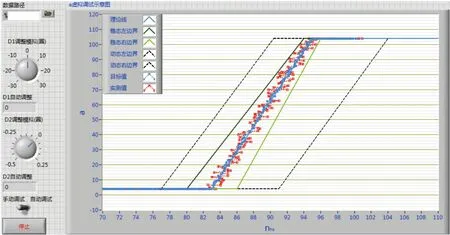
图6 清洗润滑铰链机构前
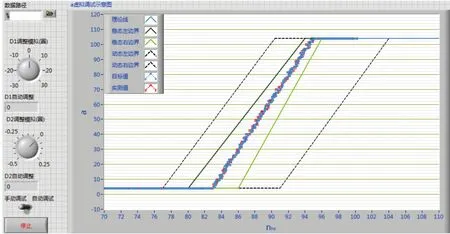
图7 清洗润滑铰链机构后
由图6、图7中与理论值中位线的分布情况,结合式(1)~式(4)确定的方法也可以有效发现,清洗润滑前后式(1)和式(2)之和pw1分别为0.54、0.11,可见所开发的虚拟仪器能有效监控导流叶片偏转机构性能。
基于现有的虚拟仪器应用思路,该模拟调试功能亦可进一步扩展,除了应用在系统故障模拟、故障仿真[16]方面外,还可在航空发动机的仿真调试中进行借鉴运用,实现对航空发动机重要运行参数的实时监测,从而对其性能态势进行研判,最终实现重要故障的预警提示。
4 结束语
根据本文提出的方法,应用虚拟仪器编程技术,实现了航空发动机导流叶片偏转角度控制系统的虚拟调试方案,此方法能实时对航空发动机运行时的性能参数进行监控和实施虚拟调试,能有效节省燃油、延长发动机寿命,保证航空发动机安全运行,具有较高的经济效益和应用价值,进一步可以推广到发动机其余系统的监控和调整。
