FCS-MPC在HAPF无功补偿控制中抑制谐振的研究
2021-07-05汪玉凤张红梅殷煜炜
汪玉凤, 张红梅, 殷煜炜
(辽宁工程技术大学 电气与控制工程学院,辽宁 葫芦岛 125105)
在输配电系统中,无功电流的动态变化会引起电压调节和稳定性被破坏的问题,使电能质量恶化,并增加系统损耗。为了解决与高可变无功功率负载相关的问题,使用有源补偿器(如静止同步补偿器(STATCOM)、UPFC统一潮流控制器(UPFC)、有源电力滤波器和混合滤波器)要优于电容器组[1]。一般来说,混合滤波器的控制由两种算法组成:一种是负载无功功率,另一种是负载控制设备根据负载需求提供的无功功率。对于混合滤波器中的输出控制策略,最常见的算法是将PI控制器用于d-q参考系或滞环控制器[2]。近年来,自适应控制、滑模控制和预测控制等控制策略的使用越来越广泛[3-5]。在各种预测控制器中,有限控制集模型预测控制(Finite Control Set Model Predictive Control,FCS-MPC)在电力电子领域已成为研究的热点。FCS-MPC考虑了有限数量的开关状态,以限制控制动作的数量。FCS-MPC采用离散的数学模型来预测系统在每一开关状态下的状态。最后,为了解决优化问题,建立了成本函数对预测值进行评估,以确定控制状态。
已经有部分文献研究了几种用于识别负载无功功率的技术。文献[6]~文献[8]阐述了几种用于识别负载无功功率的技术,包括SRF(Self Resonant Frequency,自谐振频率)[6]、p-q理论[7]以及基于小波和自适应滤波等[8]。文献[9]~文献[11]为弥补转换器模型的简单性,提出了FCS-MPC广泛应用于与L滤波器并联的转换器。例如,文献[9]在使用STATCOM进行无功补偿时,使用FCS-MPC通过解耦有功和无功控制改善了设备的动态响应。然而,FCS-MPC在无功功率控制混合滤波器中的研究比较少。文献[11]提出了FCS-MPC在LCL滤波器的并网变换器中的应用,由于算法固有的可变开关频率,所以会稍微复杂一些。 除了谐振外,电容器在滤波器的模型方程中引入了延迟,这使线电流的直接控制变得复杂。 然而,由于算法的优势,在开关频率可变的LCL滤波器的稳定性和谐振问题上,FCS-MPC的应用具有一定的意义。文献[11]~文献[13]针对多变量控制和长时间预测等问题,提出了几种将控制技术与有源阻尼算法相结合的解决方案。
综上所述,笔者利用FCS-MPC的主要优点来改善HAPF(Hybrid Active Power Filter,混合有功电力滤波器)的动态无功功率控制。使用基于LCL滤波器方程的离散模型来预测系统状态并优化成本函数。将所提出的控制技术与有源阻尼算法结合起来。采用自适应陷波器(Adaptive Notch Filter,ANF)的简单结构来实现有源阻尼算法,并获得控制参考和负载反馈功率。使用ANF的方法与SRF相比不仅减少了控制算法的处理时间,而且改善了动态响应。本文提出的控制策略提高了设备的动态响应、有功和无功功率控制之间的解耦能力和正确跟踪无功功率参考波动的能力。为了证明控制算法的有效性,在一个7.5 kVA的单相HAPF模型上进行了仿真和实验。
1 FCS-MPC混合型有源电力滤波器的建模与分析

图1 HAPF拓扑无功补偿

VS=Vaf-j(XC)If
(1)
(2)
(3)
(4)
FCS-MPC的使用前提是HAPF模型必须将变频器电压(Vinv)定义为输入,并将混合滤波器电流(If)定义为输出。
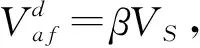
如图2所示,为混合有源电力滤波器标幺值等效电路,该模型表示了每单位(p.u.)的变量,Vinvpu和Iinvpu分别为逆变器的单位电压和电流。LCL滤波器参数为:Lfpu和Rfpu(逆变器侧滤波器电感及其内阻);Cfpu和Rcfpu(滤波器并联电容及其内阻);Rtpu和Ltpu(短路变压器电阻和电感)。
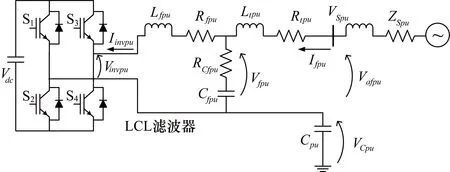
图2 混合有源电力滤波器标幺值等效电路
此外,Vfpu为滤波电容器的电压;Ifpu为混合滤波器电流;Vafpu为有源滤波器电压;VCpu为电容器组电压;VSpu为源电压。用标幺值表示使得空间状态建模更容易,考虑到变频器是通过耦合变压器连接到系统。HAPF的状态空间方程表示为
x(t)=Ax(t)+Bu(t)
(5)
为了表示混合滤波器的动态性能Iinvpu、Ifpu和Vfpu被定义为状态变量,Vinvpu和Vafpu被定义为控制变量。
(6)
其中,
(7)
状态空间连续系统可以被有效地离散化,如式(8)~式(10)所示:
x(k+1)=Adx(k)+Bdu(k)
(8)
Ad=eATs≈I+ATs
(9)
Bd≈BTs
(10)
式中,k为采样周期(t=kTs)的倍数;Ad为离散状态矩阵;Bd为离散输入矩阵。
2 有限控制集模型预测控制
FCS-MPC通过电子变换器的离散特性来减少MPC算法的计算次数。逆变器具有有限数量的开关状态,因此仅针对该操作集来解决优化问题。先前提出的HAPF的离散模型用于预测下一个采样时刻xP(k+1)的状态变量。在本文中,使用的逆变器是一种单相H桥,常用于分布式发电系统。对于单相逆变器,算法必须考虑4个开关状(Sn):v0=0,v1=Vdc,v2=-Vdc,v3=0。采用的控制方法考虑到参考状态空间变量(x*)和每个开关状态(xP)的预测值来估计定义的成本函数J=|x*-xP|。因此,最小化成本函数的Sn作为下一个采样周期的控制动作时,预测范围是N=2,为了补偿由处理时间引起的延迟,首先估计xP(k+1)的值,然后评估xP(k+2)的代价函数[14]。
如图3所示,表示了应用于HAPF的FCS-MPC控制策略,步骤如下:
① 测量状态变量:Vf,Iinv,If,Vs,IL,Vdc。
② 应用最佳开关状态Sopt。
③ 获得系统变量的p.u.值。
⑥ 将有效阻尼项添加到Vfpu。
⑦ 从式(8)估计(k+1)时刻的系统状态。
⑧ 预测(k+2)时刻的系统状态。
⑨ 评估成本函数以定义最佳切换状态(Sopt)并在下一次采样中应用。
图3 混合滤波器FCS-MPC框图
2.1 自适应陷波滤波器设计
FCS-MPC控制LCL滤波器所构成的逆变器需要使用额外的算法来避免不需要的共振,本文应用一个自适应陷波滤波器进行有源阻尼并获得FCS-MPC的控制参考。如图4所示,给出了ANF结构[14],d(k)为输入信号,y(k)为输出信号,误差e(k)用于自适应法则。这个滤波器的目的是保证y(k)可以在幅度和相位上跟踪基频输入信号。使用最小均方(Least Mean Square,LMS)算法来调整系数,虽然LMS是自适应滤波中最简单的算法,但它对谐波提取的响应与递归最小二乘算法相似[15]。
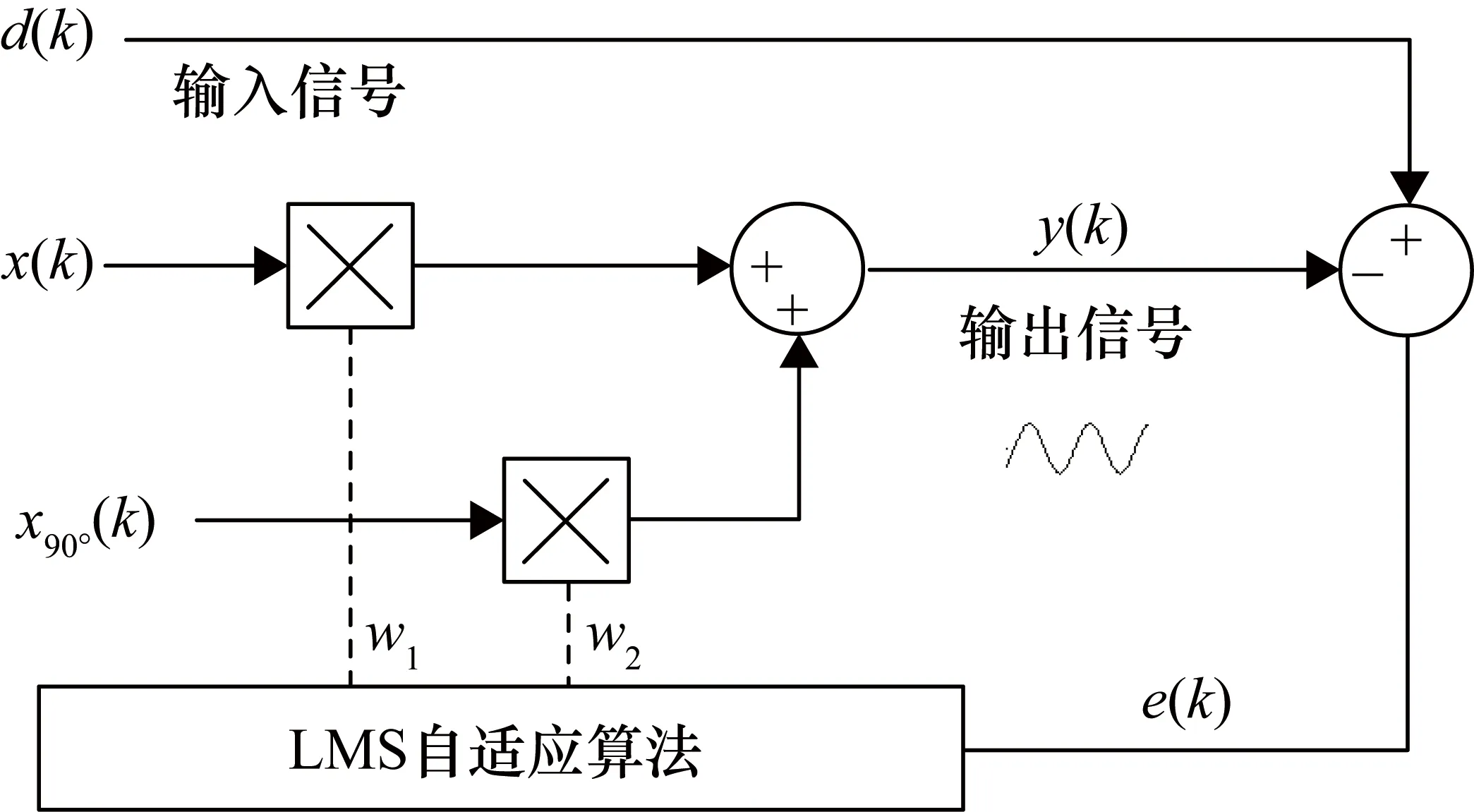
图4 自适应滤波原理
式(11)~式(13)给出了用于ANF的LMS算法的一般递归公式:
y(k)=w1(k)x(k)+w2(k)x90°(k)
(11)
e(k)=d(k)-y(k)
(12)
w1(k+1)=w1(k)+μe(k)x(k)
(13)
w2(k+1)=w2(k)+μe(k)x90°(k)
(14)
式中,x(k)和x90°(k)为由数字PLL(锁相环)提供的两个正交信号;w1(k)和w2(k)为滤波器系数;μ为步长值,用于控制算法的收敛速度及其精度。ANF只有两个系数需要调整,这使得ANF控制算法比其他算法显得更容易且更快[14]。考虑ANF的输出时,它的基本组成部分为
y(k)=w1(k)sin(ωt)+w2(k)cos(ωt)
(15)
式(15)可化简为
y(k)=asin(ωt+θ)
(16)
式中,a为峰值;θ为参考信号和输出信号之间的角度。 扩展这个等式的结果为
y(k)=acosθsin(ωt)+asinθcos(ωt)
=w1(k)sin(ωt)+w2(k)cos(ωt)
(17)
ANF系数w1(k)和w2(k)分别等同于SRF中的dq分量。如文献[16]所述,与SRF相比,ANF具有更好的动态响应并且所用的处理时间更短。通过采用单位输入正交信号,可以在0<μ<0.5的范围内确保步长值的稳定性[17]。
2.2 混合滤波器的控制参考量

(18)
式中,sin(ωt)和cos(ωt)由PLL提供且与电源电压相位相同。

(19)

(20)
(21)

(22)

(23)
在时域中,电流由下面公式给出:
(24)
2.3 有源阻尼设计和谐波抑制算法
合理的LCL滤波器设计可有效避免谐振。本文所设计的LCL滤波器采用了文献[14]中提出的一些概念和可用的无源元件,并在其基础上,引入了两个谐振频率fr1=1448 Hz和fr2=1574 Hz。由于FCS-MPC的可变开关频率,因此有必要采用阻尼谐振技术来确保控制的稳定性;使用与输出电感串联的虚拟电阻(RV) 来满足所需的阻尼谐振以及避免由电源电压失真引起的谐波电流,为了利用这两个特性,用ANF来模拟这种电阻对谐波频率的影响。表1给出了所获取的数值。有源阻尼策略的结构图,如图5所示。

表1 LCL滤波器参数

图5 有源阻尼策略的结构图
2.4 LCL电容器电压和逆变器电流的变量控制
FCS-MPC通过适当定义成本函数可以同时控制Vf和Iinv。当3个状态变量中的两个被控制时,更易于确保稳定性且避免了谐振。Iinv控制保证了稳定性,Vf控制允许有效的主动谐振阻尼和源电压谐波抑制。多变量成本函数为
(25)
式中,Kinv和Kf为定义控制优先权的成本函数收益。 由于系统以标幺值表示,因此不需要对成本函数变量进行归一化。
3 仿真与实验
在Matlab/Simulink中进行仿真,并对所提出的FCS-MPC算法进行实现和评估。表1中列出了LCL滤波器参数,采样频率为40 kHz。系统参数设计如表2所示。
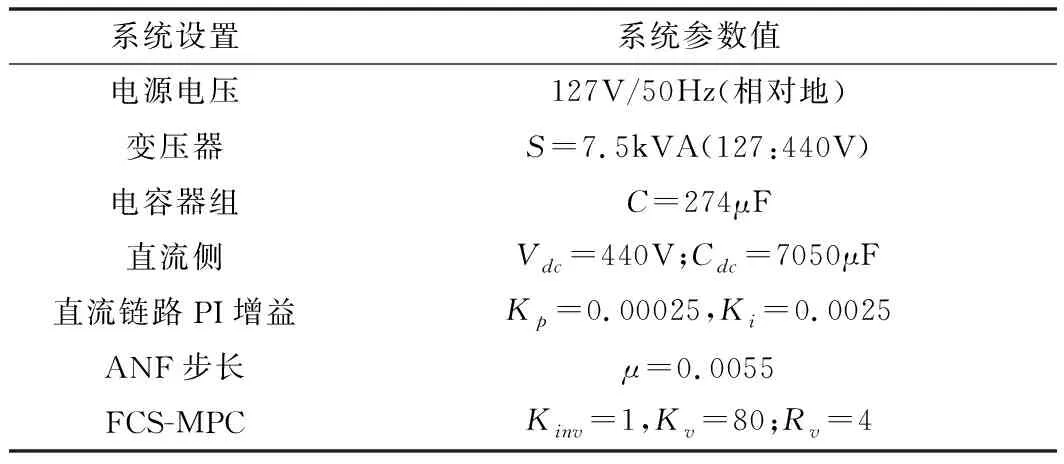
表2 系统参数

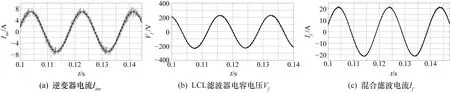
图6 多变量控制的状态变量及其参考值
成本函数通过保持Kinv=1增加Kv来优先控制Vf。当Kv=0时,系统只控制Iinv,Vf呈现出明显的直流电压水平。
成本函数增益如图7所示。其中,图7(a)显示了Kv增加时的直流电压分量特性。当Kv>30时,直流分量被消除。由于电压参考(Vf直流分量)中加入的项与谐波电流成比例,所以它也影响有源阻尼。图7(b)显示了不同Kv和Rv值时的混合滤波器电流THD(Total Harmonic Distortion,总谐波畸变)。由于ANF用于隔离谐波电流,因此Rv和Kv的值太高的话会影响FCS-MPC的动态特性。尽管ANF具有一定的动态响应能力,但仍然比FCS-MPC响应慢得多。为此,基于仿真结果选择Kinv=1,Kv=80和Rv=40,以保证If的THD值较低,对算法的动态响应没有明显影响。仿真证明了FCS-MPC用于HAPF无功功率控制的可行性,并且评估了多个工作点控制参数和成本函数增益。
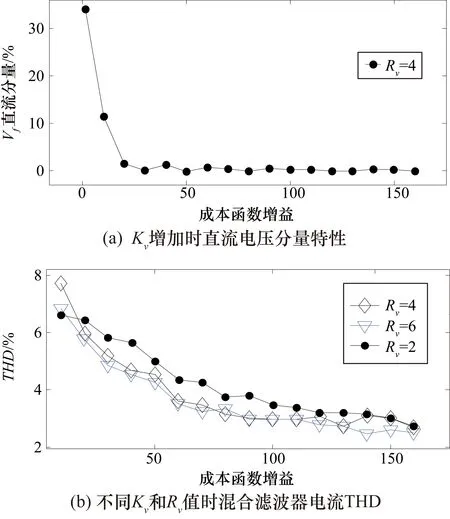
图7 成本函数增益

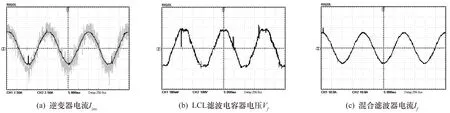
图8 FCS-MPC的稳态性能
混合滤波器电流If和有源阻尼(Active Damping,AD)的瞬态响应如图9所示。

图9 混合滤波器电流If和有源阻尼(AD)的瞬态响应

图10 电流波动轨迹
图10(a)表明,由于直流母线电压波动,PI控制器不能对有功和无功功率进行解耦。因此,它不能适应当前的参考电流。另外,FCS-MPC能解耦有功和无功潮流(恒定的直流母线电压),并能精确跟踪电流基准的波动。
HAPF的动态负载参考如图11所示。利用具有平滑直流电抗器的3 kVA单相晶闸管整流器验证了用于非线性负载无功补偿的FCS-MPC算法。首先,调整触发角度α,当α≈60°时,调整角度后,负载所需的无功功率为1850 Var,THD为32.6%。负载阶跃后,当α2≈10°,负载无功功率为680 Var,THD为33.8%。HAPF可以确保电源端的无功功率和THD的混合滤波器电流均小于5%,这说明了谐波抑制算法的有效性。 因此,FCS-MPC算法可以实现快速补偿,以避免电压波动使线路电流最小,并精确地跟踪负载无功功率。结果表明,HAPF可以有效跟踪非线性负载瞬时状态,需要时间大约为12.1 ms,远小于1个周期,控制时间上远小于其他文献中提出的HAPF控制策略。例如文献[18]提出了一种基于改进的拓扑结构的SRF比例谐振电流控制,在约等于2.5个周期时才达到稳态;文献[1]提出的基于新型混合有源滤波器拓扑的比例谐振控制器在约等于1.5个周期内达到稳态。因此,提出的基于FCS-HAPF的控制方法的动态响应和跟踪负载变化相比于其他方法快得多。 这一优点使得该控制策略可以用于需要快速无功补偿的系统,如电弧炉、焊接系统和风力发电场等,且补偿效果更好。
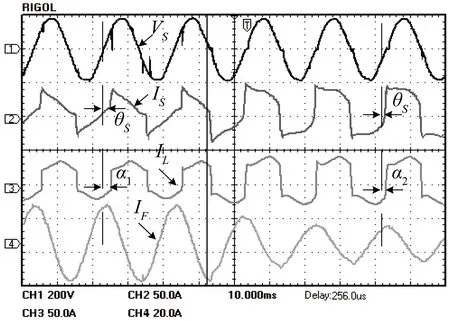
图11 HAPF的动态负载参考
4 结束语
本文详细研究了FCS-MPC在混合有源电力滤波器中的应用。该算法能够控制HAPF无功功率,改善其动态响应。仿真和实验结果表明,FCS-MPC用于HAPF无功功率控制的可行性。并且评估了多个工作点的控制参数和成本函数增益,获得的结果是相似的。多变量成本函数适用于控制由LCL滤波器构成的HAPF;验证了ANF算法对阻尼谐振的抑制能力,并且阻断了电源电压失真引起的谐波。保证了混合滤波器在稳定状态下的电流THD能达到标准值。该策略与传统的PI控制器相比,提高了设备的动态响应能力、有功和无功功率控制之间的解耦能力和正确跟踪无功功率参考波动的能力。
