基于改进YOLO模型的交通标志检测
2021-06-23黄尚安
黄尚安
(江门职业技术学院,广东 江门529090)
当前智能交通正处于飞速发展的阶段,特别在无人驾驶、辅助驾驶领域中对于交通标志检测技术的要求越来越高,如何做到快速、准确的检测交通标志,平衡目标检测速度和精度之间的关系,一直是研究人员追求的目标。
Kun Ren 等人提出了一种基于深度可分DetNet 和Lite 融合特征金字塔网络(LFFPN)的实时交通标志检测系统。该模型采用深度可分的瓶颈块、Lite 融合模块和改进的SSD 检测前端,实现了速度和精度的折衷,在GTSDB 数据集上的mAP 为81.35%[1];JA Khan 等人基于YOLO 模型建立了交通标志检测器,采用网格优化和锚箱优化的方法对小型交通标志的检测性能进行了优化,也取得了不错的成绩,但是模型计算量却有待进一步控制[2];F Liu 等人提出了一种基于信道关注与特征融合网络(CAFFNet)的多目标交通标志检测方法。该方法通过轻量级信道注意网络有效地学习特征信道之间的相关性,在不降低维数的情况下实现局部交叉信道交互,提高了网络的表示能力,mAP达到了0.88 的好成绩[3];J Zhang, 等人提出了一种级联的R-CNN 来获取金字塔中的多尺度特征,除第一层外,级联网络的每一层都融合前一层的输出边界框,以进行联合训练,且在此基础上,提出了一种基于点积和Softmax 的加权多尺度特征提取方法,并将其归结为细化特征,突出交通标志特征,提高交通标志检测的准确性,也取得了不错的成绩,但是模型参数量过大,有待优化[4];PS Zaki 等人提出了一种利用快速递归卷积神经网络(F-RCNN)和单镜头多盒检测器(SSD)等多目标检测系统,结合MobileNet v1 和Inception v2 等多种特征提取器,解决交通标志检测问题,mAP 达到了0.86[5]。
交通标志检测相对于其它目标检测问题,有相当多的特殊性:如雨雪天气下、极端光照下或者遮挡污损下,如何保证在恶劣天气状况下准确检测出交通标志;再比如当前众多的算法模型对交通标志检测会出现性能下降的情况,本文研究基于改进YOLO 模型的交通标志检测方法,力求在检测精度和速度之间达到平衡,做到又快又好。
1 方法设计
1.1 YOLO 模型
YOLO 模型是华盛顿大学Joseph Redmon 最早构建提出的一种端到端的目标检测模型,它的本质实际上是对回归问题进行求解[6]。模型的入口就是原始待检测图像,而模型的出口就是目标检测的结果位置以及相应类别,它与fast rcnn 等目标检测算法的区别是:YOLO 模型的训练迭代和目标检测都是在一个独立网络中工作,相较于多种模块混合工作的方式,YOLO 模型拥有更加优秀的检测速度,但是过于“单一模块”的工作方式,又让它的检测精度受到限制,图1 为YOLO 模型的整体架构。

图1 YOLO 模型的整体架构
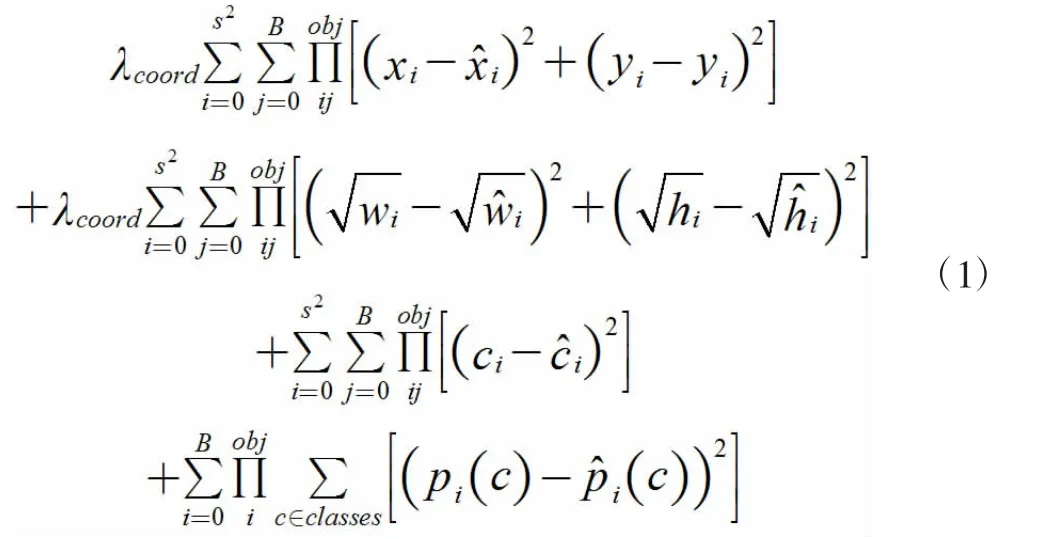
如图1 所示,YOLO 模型的卷册层共计24 个,全连接层共计2 个。YOLO 模型在训练过程中的损失函数如下所示:
1.2 特征加深模块
CNN 卷积神经网络中感受野的值越小,卷积层对细节特征的提取能力就越强,反之则变弱[7]。而YOLO 模型中前部分网络层的感受也较小,本文研究构建一种特征加深模块,加强YOLO模型中前部分网络层对细节、局部特征的提取能力,从而增强对交通标志的检测能力。如图2 所示,特征加深模块包含前、中、后三个网络层,每个网络层都包含卷积核大小为1×1、3×3 的卷积层,且最终将加深的特征融合到批量标准化层(BN 层),以此完成细节特征加深的主要工作。
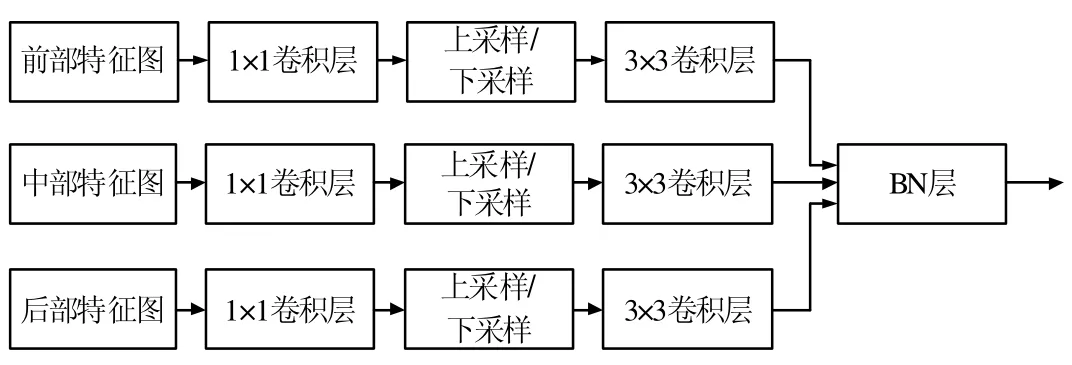
图2 特征加深模块
1.3 改进的YOLO 模型
图3 为改进的YOLO 模型,添加的特征加深模块中,卷积核、特征图大小及层数都已在图中标明,值得注意的是,提出模块使用Lanczos 插值算法[8],能够进一步加深细节和局部信息提取能力,且能有效控制模型计算的参数量。
2 实验结果及分析
2.1 实验细节
本文提出的改进模型和原YOLO 模型都在德国交通标志公共数据集GTSDB 上进行训练和评估。初始学习率设置为0.001,动量设置为0.7,权重衰减设置为0.0003,批量大小设置为28,数据集图像输入像素大小统一调整为448×448。本文选择的实验数据集GTSDB 中有900 幅图像,我们将其中的600 幅图像用于训练,300 幅图像用于本文提出方法的评价。我们在具有Intel Core i7-11700K CPU,32 GB RAM,NVIDIA GeForce GTX1080 GPU 和Ubuntu 18.04 的计算机上做实验。
2.2 实验结果及分析
将原YOLO 模型设为模型A,将添加特征加深模块的YOLO 模型设为模型B,前期900 个迭代次数下,代价函数与迭代次数的关系,如图4 所示。

图4 模型代价函数与迭代次数的关系图
无论是原YOLO 模型,还是改进的YOLO 模型,随着迭代次数的增加,模型都可以很快将代价函数值降下来,模型拥有非常优秀的训练速度,较好控制了计算量。本文提出的改进YOLO模型和当前其他算法的mAP 对比,如表1 所示。

表1 与当前其它方法的结果比较
通过和当前较多方法实验结果的对比,本文提出的改进YOLO 模型相较于原模型mAP 提升了13.3%,且优于目前众多算法模型。
3 结论
本文提出了一种基于改进YOLO 模型的交通标志检测方法,解决了原模型对交通标志检测出现性能下降的情况,能够在控制计算量大小基础上,获得优秀的检测性能。下一步还将研究特征加深模块对其它目标检测算法的帮助。
