矿山工程测量中无人机机载激光雷达的应用效果分析
2021-06-23冀晓彤
冀晓彤
(甘肃煤田地质局一四九队,甘肃 兰州 730020)
近几年来,随着我国测量技术的发展,矿山工程勘测的数量也在逐年增加。通信、计算机技术的优化和完善,提升了勘测结构的完整度和严谨性,促使矿山工程勘测取得较好成果。但是目前阶段,由于开采次数增加,部分施工团队存在不规范的操作行为,导致矿山自然灾害频发。面对当前的发展现状,在测量之前需要对矿山工程进行有效勘探,确保工程实施的稳定[1]。现如今,无人机广泛应用在社会各个领域,并且取得了较好的成果,随着技术的精进,无人机的自动化巡检手段以及机载能力也得到了极大地提升,通过装载不同型号的机器,完成相应的工作任务[2]。矿山的地质测量可以应用无人机机载雷达,将没有角度关联限制的激光雷达与无人机结合,通过绘制三维地图的方式对地形路线作出记录反馈,从而进一步完成巡检目标任务。但是,随着激光雷达功能性能的增加,给无人机的运行造成了一定的压力,所以在实际应用过程中,出现了较多的问题和缺陷,影响矿山工程勘测的结果[3]。因此,通过多角度、多层级的设计,对矿山工程测量中无人机机载激光雷达的应用效果进行分析,调整传统的应用模式,减少干扰性数据,确保运行方向和轨迹的正确性,提升测量精度值,同时可以更加快速地获取矿山具体位置,以此提升无人机机载雷达对矿山探测的效率和质量。
1 矿山工程测量中无人机机载激光雷达的应用效果分析
1.1 确定区域波形初始特征参数
为了进一步明确激光雷达对矿区不同岩性图像特征的分析,在矿区的基坑内部设立相应的探测点,并将勘测位置选择在矿区基坑内部钻孔口处,在一定程度上可以减少外部因素对无人机勘测的影响,同时也能减少对雷达勘查结果的影响。选择150Mhz的路面耦合天线进行信号测量,将无人机的介质参数设定为15.34~20.35之间。依据勘测范围,建立6个对应测量点,并且每一个测点之间的距离保持在8m,测深为55m。无人机的测量模式更改为步进式连续探测,当无人机机载激光雷达获取到相应的勘测数据后,由最后一个勘测点进行处理。处理探测点的初始数据,计算测量目标体的综合系数,具体如公式1所示:

式中:H表示测量目标体综合系数,s表示探测的实际范围,f表示可变目标。通过计算,可以得出实际的测量目标体综合系数。根据数值结果明确相应的目标体,并且利用雷达获取矿区的区域特征波形,在此基础上计算初始特征参数,如公式2所示:

式中:L表示初始特征参数,θ表示滤波长度,s表示覆盖总距离,通过以上计算,最终可以得出实际的初始特征参数,完成指标参数的确定。
1.2 耦合网度控制
确定矿区区域波形初始特征参数后,对耦合网度进行控制。当无人机飞行至矿区工程上方时,天线会向其发动区域波形,雷达在接收波形之后,会置换为耦合指令,传输至无人机控制平台。所以,需要对置换比例进行计算,如公式3所示:

式中:J表示置换比例,a表示传输距离,g表示允许出现的误差距离,h表示符合覆盖范围。通过计算,可以得出实际的置换比例,依据比例将波形转换为对应的耦合指令,添加至无人机控制系统中,关联无人机应用节点,形成与勘测范围一致的耦合网度。依据实际的勘测情况,计算此时应调控的耦合网度,如公式4所示:

式中:K表示实际调控的耦合网度,V表示控制程度,E表示雷达勘测纵轴距离。通过以上计算,可以得出无人机实际调控的耦合网度,根据数值结果对应耦合网度进行控制。
1.3 有限单元法实现矿山工程测量
完成耦合网度控制后,利用有限单元法实现无人机机载激光雷达对矿山工程的测量。当雷达获取到相关探测数据后,更改运行程序,具体如图1所示:
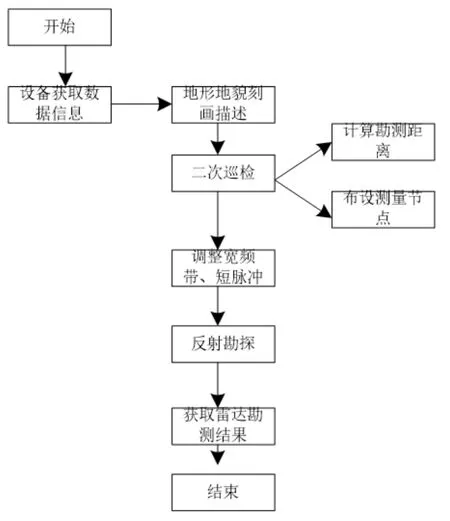
图1 雷达运行程序结构图
根据图1可知雷达程序的相应结构。在此基础上,将宽频带和短脉冲以纵向的形式发射高频电磁波,以冗余电波作为介质,形成反射勘探。反射信号经由信道传输至控制平台,利用有限单元法计算出对应的单元强度,如公式5所示:

式中:N表示单元强度,C表示勘测总距离,ω表示变化系数,R表示介电质数。通过计算,可以得出实际的单元强度。以强度结果作为标准,在数值可控范围内分析数据信息完成最终测量,并对测量结果作出结论。
2 实例分析
2.1 无人机机载激光雷达在矿山测量中的应用现状简述
现如今,无人机的应用领域越来越广泛,更是逐渐成为矿山测量的主要勘测工具。矿山勘测是对矿山的地貌依据地势地形进行记录勘查,同时对部分开阔区域进行数据粗略测量,虽然可以达到预期的目标,但是在实际应用过程中,还会存在一些问题和缺陷。例如,勘测效果图不清晰不能有效识别地貌与地形,数据测量结果不准确导致最终应用出现误差等。小型矿山开采工程应用效果相对较好,但是面对大型工程会存在一些变化,在这样的发展现状下,需要重新对无人机勘测技术进行创新调整。
2.2 分析过程以及结果
了解上述应用现状后,依据实际情况进行具体分析。选取Q矿区作为分析对象,矿区的侧方与迅达大道交叉,并且安装多个内径为1.5m~2.5m,顶管壁厚为0.3m的水管道,部分矿洞的高度为67.01m~82.94m。依据标准,将无人机调整至最佳状态,并且设置激光雷达,具体设置为:雷达的检测范围在50.69m~120.37m之间,冗余长度为20.35m,数据保存时间为1周,雷达的实际覆盖面积为300.65m2。测试时将雷达放置在无人机的机座中,关联无人机操控系统,结合无人机和雷达的操控系统。开始勘查,使无人机在矿山的标定位置上空飞行3圈,每一圈的长度不同,获取数据信息后,对矿山工程的相关指标进行航测,并分析测量结果,最终得出相对应的数据,具体分析结果如表1所示:
根据表1中的数据信息得出实际结论:在不同的航测距离下,无人机机载雷达对矿山工程各项指标系数测量总误差均在0.2以下,表明其应用效果较好,具有一定的实际应用价值。
考虑到矿山待测量区域地形复杂,遮挡物较多,采用传统的测量方式会出现顶面数据缺失的情况。矿山测量中采用无人机机载激光雷达,无需布置飞行航线,低空飞行时可捕捉到被遮挡部分的相关数据信息。激光雷达探测覆盖范围面积更大,测量数据采集的整体性要优于其他设备,在高空状态下无人机搭载雷达收集数据的精准度较高。从表1可以看出,三组航测数据误差控制在0.03~0.05范围内,说明残差值控制良好,可以满足矿山大比例尺测量精度的要求。
3 结语
综上所述,通过分析矿山工程测量中无人机机载激光雷达的应用效果,提高其应用价值。近几年来,无人机被应用在社会各个领域中且均取得了较好的应用效果,在矿山工程测量中,利用无人机机载激光雷达进行位置确定以及地形测量,在工程实施的前期,扫清相关障碍,根据雷达刻画记录对应的地势特征、地貌情况,部分开阔区域还可以利用测量设备作出粗略计量,以此减少工程测量的工作量,确保工程的顺利实施。