无人机载残骸搜索系统的设计与实现
2021-06-16王文灿崔唯佳王雪梅
王文灿,崔唯佳,王雪梅
(1.中国人民解放军96901部队,北京 100094; 2.中国电子科技集团公司第五十四研究所,河北 石家庄050081)
0 引言
残骸搜索旨在将火箭整流罩[1]、飞机[2]等飞行器落地后产生的目标残骸进行准确、快速搜索和回收。通过对回收残骸的分析能够有效地进行武器毁伤评估、飞行器故障排查以及对危险品进行及时处置和销毁。
传统的残骸搜索方法主要依靠地面检测设备和大量人力在落点区域进行地毯式搜索,这种方法费时费力,效率较低,适用于落点区域固定且覆盖范围小的情况,在较为复杂的地形环境中任务执行受限,另外在靶场试验过程中,如果出现飞行器未按预定轨道飞行,或出现故障意外坠落等情况[3],目标残骸搜索的难度变得更大。当前,随着武器技术的不断发展,残骸落点的区域覆盖范围不断扩大,搜索难度日益增加,仅依靠传统的残骸搜索方法已经无法有效保证搜索的准确性和高效性[4]。
为提升残骸搜索系统的环境适应性和时效性,本文设计了无人机载残骸搜索系统,利用无人机搭载可见光、红外和SAR等任务载荷[5],对落点区域进行预估、探测,通过专用侦察信息处理算法实现对残骸的快速识别与定位[6-7]。系统具有较强的操控性和环境适应性,能够为复杂环境下的残骸搜索任务提供有力保障。
1 无人机载残骸搜索系统组成
无人机载残骸搜索系统组成如图1所示,主要由操作控制分系统、无人平台分系统、数据链分系统、任务载荷分系统、载荷信息处理分系统以及综合保障分系统组成。
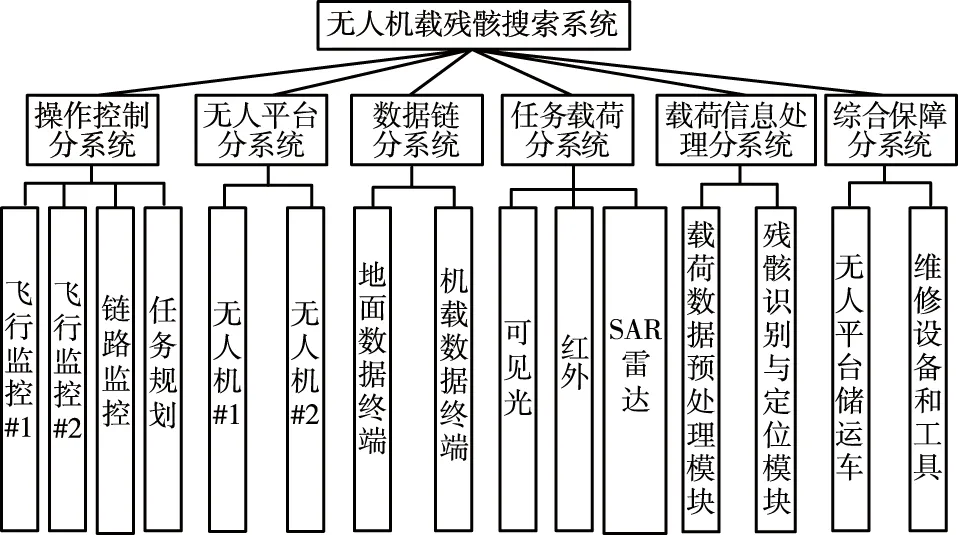
图1 无人机载残骸搜索系统组成Fig.1 Composition of UAV based wreckage search system
(1) 操作控制分系统
操作控制分系统主要为地面控制站部分,包括飞行监控单元、链路监控单元以及任务规划单元等,用于对无人机进行任务规划、飞行控制、链路控制以及状态监控等。
(2) 无人平台分系统
无人平台分系统包括2架无人机,能够根据不同搜索场景,灵活装配不同的任务载荷,实现协同探测,提高搜索效率[8]。
(3) 数据链分系统
数据链分系统包括机载数据终端和地面数据终端,用于地面控制站与无人机的通信,实现无人机和任务载荷的遥控、遥测信息的接收和发送[9]。
(4) 任务载荷分系统
任务载荷分系统包括可见光、红外和SAR雷达成像设备。任务载荷通过成熟的通信协议进行数据传输。
(5) 载荷信息处理分系统
载荷信息处理分系统主要包括载荷数据预处理模块以及残骸目标识别定位模块,用于对任务载荷获取的各类数据进行图像校正、拼接等预处理、模型变换以及残骸识别与定位等操作,同时具有数据管理、查询和显示等功能[10]。
(6) 综合保障分系统
综合保障分系统主要包括无人平台储运车、维修设备等,用于对无人机的快速转运以及维修保障。
2 工作原理
无人机载残骸搜索系统的工作原理如图2所示,主要包括任务规划、飞行侦察、落点区域检测、数据传输以及载荷信息处理5部分。
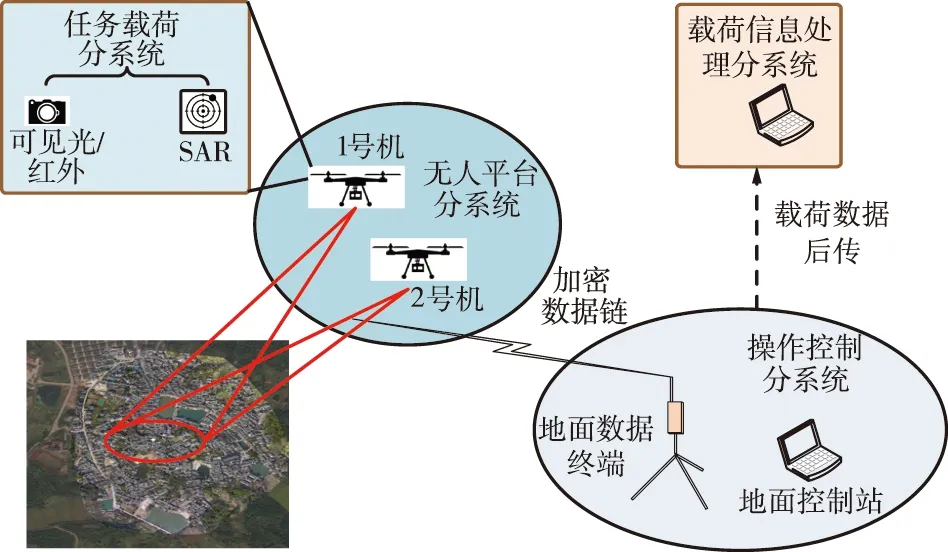
图2 无人机载残骸搜索系统工作原理示意Fig.2 Schematic diagram of working principle of the wreckage search system
(1) 任务规划
无人机载残骸搜索系统采用一站控双机的工作模式,每架无人机可搭载不同的任务载荷,操作人员根据落点区域的大小、形状等对2架无人机的飞行航线进行规划。图3展示了以平行航线方式规划的无人机飞行路径。

图3 航线规划示意Fig.3 Schematic diagram of the route planning
(2) 飞行侦察
地面操作人员通过数据链终端设备完成无人机、任务载荷的控制,同时将飞控、链路和任务载荷遥测信息实时传输至地面数据终端显示。
(3) 落点区域检测
无人机搭载任务载荷按照规划的航线定速巡航,任务载荷对落点区域进行扫描成像。
(4) 数据传输
无人机与地面控制站之间依靠数据链进行遥控遥测数据的快速安全传输。系统数据传输流程如图4所示。
任务载荷数据通过机载数据终端将压缩加密后的任务数据传送至地面数据终端,然后通过解密解压缩处理,利用有线传输至地面控制站显示、存储,同时转发至载荷信息处理软件进行任务数据处理分析。

图4 无人机测控系统数据流程Fig.4 Data Flow chart of UAV TT&C system
(5) 载荷信息处理
载荷信息处理流程如图5所示,首先针对各个载荷的特点进行预处理,对影像数据进行图像校正、图像拼接、差异性分析等初步处理,实现对目标区域影像的近实时预览;然后提取目标与背景图像的亮度、色调、色差、辐射温差和雷达散射特性衰减等特征参数,并根据识别算法、知识库和专家库等对目标进行识别,通过目标识别定位算法、人工判读和总体评价等过程,实现目标残骸的精确定位;最后采用位置标校和坐标转换公式对目标定位结果进行定量分析,输出目标残骸的分布情况以及坐标信息。
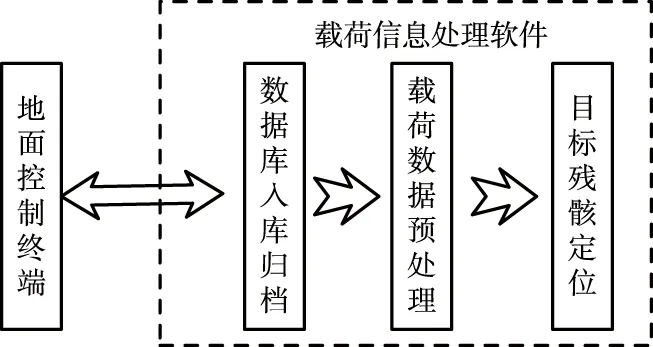
图5 载荷信息处理工作流程Fig.5 Flow chart of playload information processing
3 工程应用
图6展示了2架无人机协同探测的飞行状态示意图,每架无人机根据预设航线对落点区域进行分区域并行搜索,提高搜索的效率。
图7展示了可见光、红外和SAR雷达采集的图像数据经数据质量分析、几何校正、辐射校正、定标和拼图等预处理后的成像效果图。

图6 两架无人机飞行状态示意Fig.6 Schematic diagram of flight status of two UAVs
(a) 可见光成像效果图
图8展示了对落点区域的地貌特征差异性变化检测的效果图,首先对2幅图像的特征点进行图像配准,根据配准结果对2幅图像进行投影,最后利用投影叠加后的图像计算2幅图像之间的差异性,可以看出,通过差异性变化分析与判断,能够初步确定残骸分布情况。
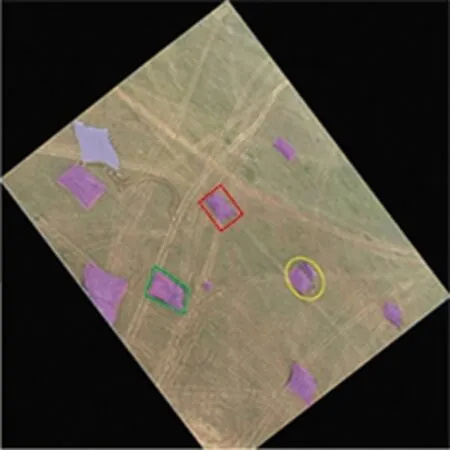
图9展示了残骸搜索的定位结果,系统通过多种图像增强和特征提取手段,利用灰度分析、轮廓分析、纹理分析和温度分析等多种识别算法,进一步检测图像中的目标,提高系统的识别能力。可以看出,无人机载残骸搜索系统能够有效对大范围区域内的目标残骸进行精细搜索,并且具有较高的定位精度。
(a) 特征点提取

图9 残骸搜索试验效果示意Fig.9 Experimental results of wreckage search
4 结束语
本文详细介绍了无人机载残骸搜索系统的系统组成、工作原理以及工程应用。设计的残骸搜索系统可搭载不同的任务载荷,进行双机协同探测,适应不同的搜索场景,能够执行大区域、复杂环境下的残骸搜索任务,有效地提高残骸搜索的准确性和时效性。
后续工作会通过设计更为合理的平台架构,提升系统的复用程度和场景应用范围;开发更为高效的信息处理算法提高残骸的识别定位精度和处理效率,为残骸搜索提供更为高效的搜索平台。
