XLPE电缆缺陷典型图像信息采集及特征提取
2021-06-16刘哲任昂葛少伟苏菲侯建峰
刘哲 任昂 葛少伟 苏菲 侯建峰
(国网山东省电力公司济南供电公司 山东省济南市 250000)
1 引言
电缆线路巡视可为电力系统电缆线路的安全可靠运行提供有力保障,但随着电力电网产业飞速发展,城市电缆化率逐年提高,电缆线路巡视的工作量日益加大[1]。然而,电缆线路所处的通道复杂多样,传统电缆线路巡视技术由于各自的缺陷而不能有效满足巡视要求,这些巡视技术的不足促进了无人机电缆线路巡视技术的出现和发展。针对无人机线路巡视技术的研究已经成为了电网巡视和无人机应用领域的一个研究热点,这一方面的研究也取得了很多研究成果[2-4],然而尚缺乏关于无人机电缆线路巡视方面的应用研究。
目前,电缆线路的巡视一般采用传统的人工现场巡视,需耗费大量的时间、人力,且效率较低,当线路通道可能积聚有害气体时,人工巡视任务更为艰巨,且可能存在一定的人身安全隐患。近年来,我国广泛开展了轨道式和履带式机器人应用于电网巡视作业中的研究。但轨道式机器人作业受限于轨道安装、经济效益等多方面因素,尚不能完全满足线路巡视需求,履带式机器人无法清晰采集设备图像,巡视效率较低。而无人机具有操控要求低、灵活易用、性价比高等优点,已逐渐推广至矿井、隧道等巡视工作中[5-6]。
在无人机巡视过程中,采集的现场图像是分析线路运行状态的重要依据。但目前巡视过程中还存在一些问题,如现场作业过程中拍照点位置、角度、数量存在较大的差异性,可能会采集不必要的、不满足要求的照片,增加后期分析工作量;图像的不规范性不利于图像的规范化管理与大数据分析,缺陷目标难以分割,缺陷特征难以提取;这些因素易影响巡视工作人员对缺陷的判断和分析[7-15]。
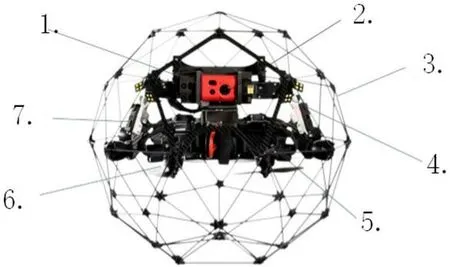
图1:电缆通道用无人机结构

图2:电缆外护套破损

图3:电缆外护套烧蚀

图4:电缆接头红外图像
为使现场巡视效果达到最佳本文应用可碰撞无人机对电缆线路进行巡视,利用机载可见光、红外设备通过悬停、定点拍照方式,对电缆通道隐患、本体及附件缺陷进行快速巡查,克服了复杂地形、未知环境给电缆线路巡视带来的困难。通过分析无人机巡视过程中采集的典型缺陷图像,采用Otsu 阈值法[16]及Kmeans 聚类[17]的图像分割法,提取电缆线路典型缺陷特征,结合随机森林算法[18],能够准确识别缺陷类型,为推进无人机巡视实用化奠定良好的基础。
2 电缆隧道用无人机
无人机巡视技术是利用机载可见光、红外等设备,通过悬停、定点拍照等方式,对电缆线路本体缺陷、通道隐患进行快速巡查的技术,克服了复杂地形、未知环境给线路巡视带来的困难,全方位获取现场资料,具有效率高、受通道影响小、无人员安全风险等优点[3]。
电缆隧道用无人机结构如图1 所示,其中:1.热成像镜头;2.光学高清摄像头;3.可碰撞防护网;4.LED 光源;5.可调节桨叶;6.电机;7.激光定位传感器。与架空线用无人机不同之处在于防护网的使用,无人机安装防护网后,可以在电缆通道内安全飞行,避免损伤通道内设备或无人机本体。同时,可见光与红外配合,更利于发现电缆附件内部缺陷,为后期图像处理提供了保障。
3 电缆线路典型缺陷采集
当电缆线路存在隐患或故障时,无法保证检修人员人身安全,因此可采用无人机及时获取电缆线路环境信息及电缆运行状况,协助运维人员解决电缆缺陷问题。无人机巡视过程中可发现电缆通道类、电缆主体类、电缆附件三大类缺陷。

图5:ntree 与标准差
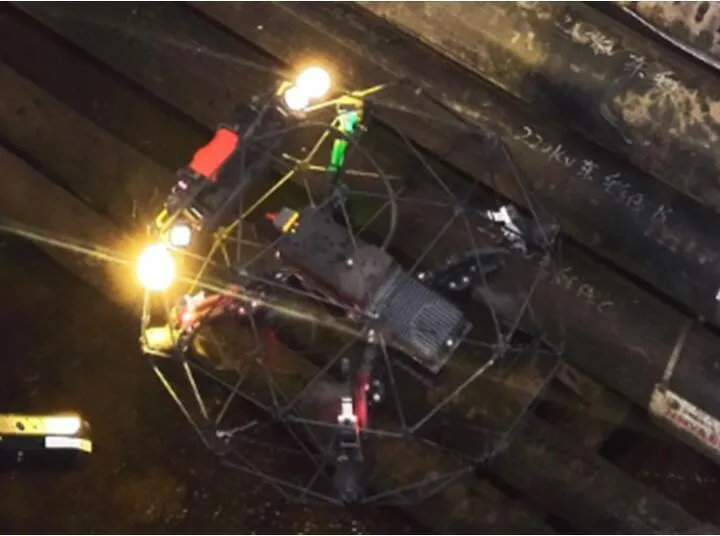
图6:无人机巡视
3.1 电缆通道缺陷
电缆通道缺陷可以分为功能性缺陷及结构性缺陷两大类。功能性缺陷指导致管道断面发生变化,影响畅通性能的缺陷,按照缺陷的严重程度可以分为轻微缺陷、中等缺陷、严重缺陷、重大缺陷四个级别,结构性缺陷指管道结构本体遭受损伤,影响强度、刚度和使用寿命的缺陷。
该类缺陷采集图像具有背景灰度值均匀,缺陷区域内的灰度值相似的特征,但各类缺陷的形状差异较大,适合采用图像识别缺陷图像的形状特征对缺陷进行表征。
3.2 电缆主体缺陷
运行过程中电缆主体缺陷的主要原因为外力破坏或烧蚀。其中电缆主体受损主要原因为电缆敷设过程中施工粗糙,电缆井口坠物使电缆外护套受损,间接导致内部绝缘结构发生变化,严重时将导致缺陷部位电场畸变,影响电缆使用寿命,如图2 所示。因城市建设通道紧张问题,部分电缆线路与通讯光缆或燃气管道共用通道,当通道内发生火灾时,极易烧蚀电缆,导致电缆绝缘失效,发生事故,如图3 所示。
3.3 电缆附件缺陷

图7:电缆隧道坍塌原始图像

图8:电缆隧道落石

图9:电缆隧道坍塌分割效果图
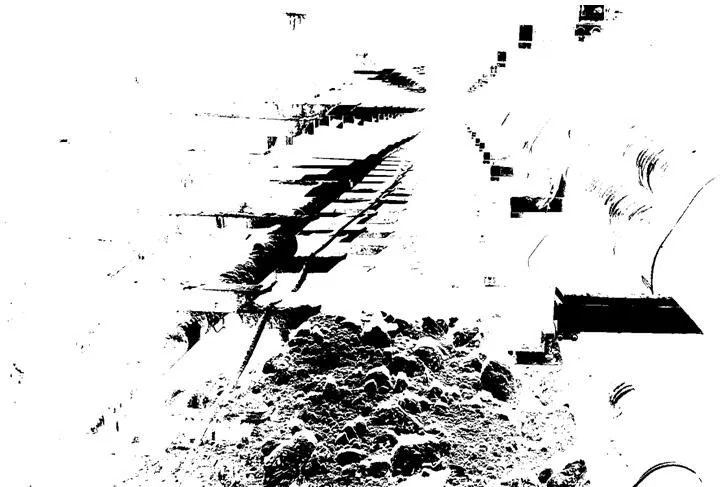
图10:电缆隧道落石分割效果图
电缆附件缺陷是电缆运行过程中常见的缺陷,在电缆通道中,以电缆中间接头缺陷为主。导致电缆中间接头缺陷的原因包括安装过程中空环境不符合标准、安装人员没有按照规程要求安装,以及长期运行内部绝缘老化等。
运用无人机搭载的红外设备,对电缆中间接头进行红外图像采集,可以直观的看到电缆中间接头是否符合运行要求,设定2℃的温差标准[12-15],着重采集不符合标准的红外热图像,如图4 所示。
4 电缆线路典型缺陷采集
典型缺陷特征提取主要包括缺陷分割、目标区域特征提取两个步骤。由于管道内壁纹理较复杂,图像背景灰度值与缺陷灰度值差异小,并且图像内目标并非完全连通,图像分割容易出现过分割或欠分割现象,无法准确提取管道缺陷,影响缺陷识别的准确率,采用Otsu 阈值法及Kmeans 聚类的图像分割法提取电缆线路缺陷。
4.1 缺陷区域分割
由于背景和目标之间灰度差异较小,选择颜色特征作为聚类分割时的准则。Lab 颜色空间中亮度与颜色信息分开,且色域辽阔,因此在Lab 颜色空间处理图像。由于电缆线路图像中内壁部分具有一致性,通过对图像分块并提取方差最大的块,在块中进行Kmeans 图像分割能够提升图像分割准确性及分割速率,方差最大的块即包含背景与目标的区域。分块具体步骤如下:
在Lab 颜色空间的a、b 通道上计算图像的方差,图像方差计算公式如(1)所示。

将图像等分为i2(i=2,3,...)个子块,分别计算每个子块的方差σj2(j=1,2,...i2)。分别计算各个子块方差与图像方差之间的差值,并选出差值大于图像方差10%的子块,若子块不存在,则令i=i+1,并重新对图像分块,直至确定出符合条件的子块。该子块则包含电缆线路缺陷与背景。
在选出的子块中执行Ostu-Kmeans 算法进行图像分割:在选出的子块Aj上执行Ostu 阈值法,将其分成Aj1、Aj2两部分。Ostu 阈值法首先计算整幅图像的灰度直方图,假设根据某个阈值T,属于前景的像素百分比为w1,属于背景的像素百分比为w2,根据式(2)统计类间方差。

式中,u0、u1分别表示根据阈值划分出来的两部分平均灰度值。遍历寻找最佳阈值,使式(2)类间方差达到最大值。
在Lab 颜色空间的a、b 通道上分别计算Aj1、Aj2中所有点的平均值式(3)。
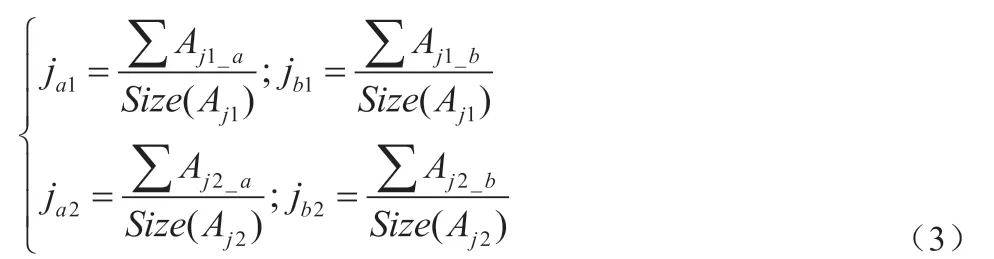
以ja1、ja2、jb1、jb2作为聚类中心,根据式(4)分别计算每个点到聚类中心的欧氏距离。

式中,Ii_a表示图像在Lab 颜色空间中a 通道上的像素值,Ii_b表示图像在b 通道上的像素值。
4.2 区域特征提取
电缆线路缺陷特征提取是缺陷识别的关键,由于图像的背景灰度值均匀,缺陷区域内的灰度值相似,各类缺陷的形状差异较大,基于选取缺陷图像的形状、红外图像特征对缺陷进行表征,利用随机森林算法对上述目标区域进行特征提取,其表达式如表1 所示。
其中:N 为缺陷区域内像素点的个数
由于随机森林训练时采用Bootstrap 方法选取样本,实际上仅有63.2%的样本被用于训练,将剩余样本作为测试样本。训练分类器时对子模型数、分裂时参与判断的最大特征数、叶节点最小样本数三个参数进行手动调整,引入偏差及方差衡量调参是否已达最优。偏差越小,模型准确率越高,方差越小,模型防止过拟合的能力越强。在通过文中所提取特征训练分类器时,依次调整子模型数、分裂时参与判断的最大特征数、叶节点最小样本数,并分别观察其对方差及偏差的影响,通过计算发现,当ntree取66 时,如图5 所示,其标准差最小可满足识别要求。
4.3 实际应用
采用无人机对220kV 某电缆通道进行了实际巡视验证,巡视如图6 所示。
共采集两处电缆通道实际缺陷,如图7、8 所示根据式(4)分别计算每个点到聚类中心的欧氏距离。寻找dk的最小值,并据此对图像进行聚类,聚类完成后图像即被分割成目标及背景两部分。
采用上述方法分割缺陷后,当图像被划分为9 个子块时可以得到分割结果,分割效果图如图9、10 所示,电缆隧道坍塌后隐患出现在通道正中央,且分割过后可明显观察到图片中央有隐患点。电缆通道落石后,图片中央存在不连续的目标区域。而通道顶部缺陷则表现为图片中央偏上方有连续隐患点。由图可知,分割后障碍物被完整保留,背景信息被剔除,无欠分割或过分割现象,效果理想。
通过无人机巡视,证明电缆通道内采用无人机进行图像采集,具有效率高、受通道影响小、无人员安全风险等优点,对于无人机巡视作业推广化应用奠定良好的基础。
5 结论
运用无人机开展电缆线路巡视工作,可有效克服复杂地形、未知环境给电缆线路巡视带来的困难,解决有限空间作业所带来的安全问题。现阶段,无人机巡视大多依靠相机、摄影机或红外感光仪器等设备进行监测,智能化水平不足,但借助无人机悬停、定点拍照功能,实现路径预规划,准确获取电缆通道、本体、附件的红外和可见光典型缺陷图库。通过融合图像分割、特征提取、模式识别等技术,降低了后期图像处理工作量,提升了巡视效率,为推进无人机巡视实用化奠定良好的基础。

表1:特征名称及表达式
开展电缆线路无人机智能巡视,应当加强以下几方面研究:制定电缆线路无人机巡视操作规范、图像采集等相关标准;开展电缆隧道用无人机构造研究,改进防护网、旋翼、电池及机身构造;结合现有智能巡视技术,开展“人工+轨道机器人+无人机”综合巡视技术研究。随着无人机路径规划、智能故障诊断及预测技术的发展,移动智能巡视技术将进一步提高巡视质量,提升电力电缆精益化管理水平。
