基于视频图像计算事故车辆行驶速度的误差分析
2021-06-13吴帅石延平
吴帅 石延平









摘 要:在各类交通事故技术鉴定中,对车辆行驶速度的鉴定占很大比例。随着城市道路视频监控覆盖率逐年扩大以及车载行驶记录设备的广泛应用,基于视频图像计算车辆行驶速度已成为一种交通事故车辆速度鉴定最常用的方法。但由于诸多自然和人为因素的影响,使利用这种方法进行事故车辆行驶速度的计算与鉴定存在一定误差。为了提高鉴定的准确性,本文分析了几种典型情况下误差形成的原因,论述了如何通过采取改进操作方法、优化参照物和特征点选取、多次平均值等方法和措施减少或修正误差,对提高车辆行驶速度计算的精度以及鉴定的准确性有一定参考价值。
关键词:司法鉴定;道路交通事故;车速鉴定;误差分析
1 概述
视频监控技术在道路交通事故技术鉴定中发挥着重要作用,视频图像能够反映事故发生的整个过程或部分片段,对碰撞点的位置、事故发生时车辆行驶路线一目了然,利用视频图像能够非常直观地再现交通事故发生过程,并计算出事故车辆行驶速度大小和变化。
目前,基于视频图像计算车辆行驶速度技术根据视频图像的来源,主要有固定式视频图像计算目标车辆行驶速度和车载式视频图像计算目标车辆行驶速度。无论任何形式载体的视频图像,都是通过计算视频图像相邻若干帧间目标车辆空间行驶时间的距离和所经历时长,根据运动速度、时间和距离三者之间的关系计算出目标车辆行驶速度。
基于视频图像计算车辆行驶速度的误差主要是客观条件限制和不正确的人为操作方式两个方面因素所造成。客观因素主要是委托方所提供的视频图像质量不高,如由于受光线变化与阴影干扰,使视频画面不清晰,事故车辆轮廓模糊;又如由于监控录像设备原因,存在所提供视频连贯性和流畅性不高以及帧率波动和丢帧现象。人为因素主要涉及不同视频摄录设备提供的记录视频的采用、图像关注区域的确定、参照物(包括道路参照物、目标车辆参照物和虚拟参照物)的合理选择、曲线或弯道行驶时“以直代曲”等。根据笔者的经验,人为因素,尤其是各类参照物的不恰当选择是交通事故车辆行驶速度计算误差的主要来源。
2 道路环境参照物选取不当引起的误差
如图1所示,假设以路边的相邻两道旁树为道路环境参照物,选定目标车辆的前车轮为特征点。图像为监控摄像头角度观察到目标车辆特征点与道旁树重合,目标车辆行驶距离为s。标识图以俯视角度所呈现的情况,此时刻目标车辆行驶距离为s1,目标车辆以道旁树间隔距离作为行驶距离,比实际行驶的距离偏小,这样就造成车速计算值减小,从而引起误差。为了减少此类误差,应选取与目标车辆接近标志物作为参照物,如车轮所行驶过路面上的特征点或特征线,只要条件允许,最好选择路面交通标线作为参照物[1]。
3 使用不同监控设备视频图像引起的误差
如实际案例1:2020年10月24日20时许,在某镇交叉路口处,一辆专用校车与自行车发生一起道路交通事故。首次鉴定机构采用车载式视频图像计算其事故时的行驶速度,计算结果为54 km/h。公安民警在案件处理过程中,一方当事人对其行驶车速不认可,申请重新鉴定。
后经公安民警取证,对事故现场固定式公安监控视频图像下载提取,两份视频分别为同向尾部拍摄和侧面直角拍摄,两视频时间同步。通过视频图像对目标车辆事故时的行驶速度分析鉴定。根据视频条件选取目标车辆参照物示宽灯做特征长度测量,测量前后示宽灯间距为7.4 m。
分析鉴定:根据事故现场同车道固定式视频图像确定车辆制动时刻。
在20:54:54秒第9帧图像上,视频图像中目标车辆制动尾灯点亮。(见图2)
根据事故现场直角方向固定式视频图像确定目标车辆的行驶速度。
在20:54:52秒第1帧图像上,目标车辆左侧第一示宽灯与虚拟参照点A相互重合。(见图3)
在20:54:52秒第9帧图像上,目标车辆左侧第四示宽灯与虚拟参照点A相互重合,此时刻被鉴定车辆前方出现驾驶自行车人。(见图4)
在20:54:52秒第10帧图像上,目标车辆左侧第一示宽灯与虚拟参照点B相互重合。(见图5)
在20:54:53秒第4帧图像上,目标车辆与其前方驾驶自行车人发生接触。(见图6)
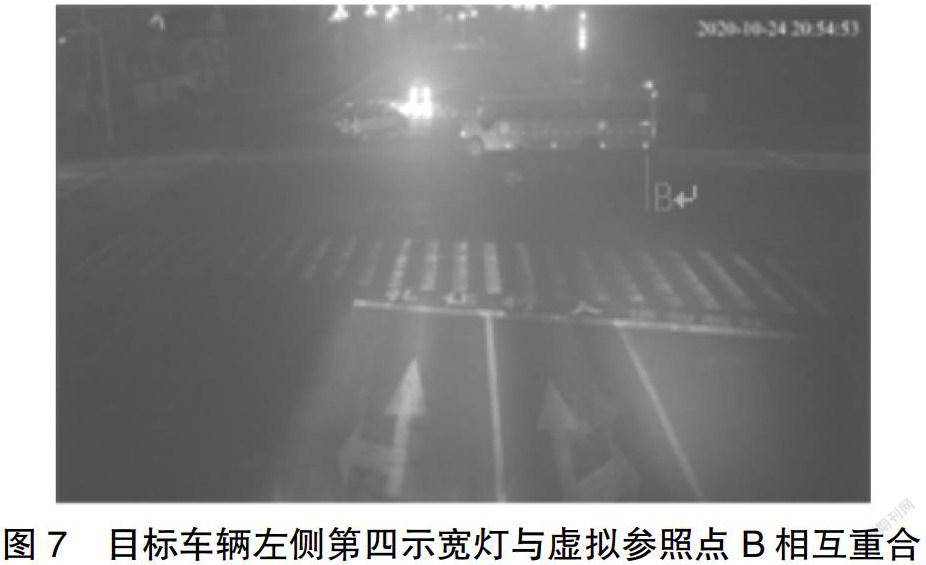
在20:54:53秒第6帧图像上,目标车辆左侧第四示宽灯与虚拟参照点B相互重合。(见图7)
利用视频录像检验所见,目标车辆驶入视频图像中路段进行分析。根据速度-时间-位移关系公式,求解目标车辆通过各空间特征点时的速度[2]。公式如下:
根据公式(1)计算目标车辆通过A点及B点路段的行驶速度。
视频图像的帧率为13帧/秒,则视频图像中的帧间隔时间为t1=1/13秒。若目标车辆通过各标记点的时间间隔帧数n=8,则通过A点与B点间路段的时间t=nt1=8t1。
依据视频图像检验目标车辆通过A点及B点距离的行驶时间相同,故t=tA=tB,即:
由车辆测量数据s=7.4 m,则将以上参数代入公式(1)整理计算得:
v≈11.94 m/s=42.98 km/h,取整为43 km/h。
综合以上分析,其视频图像播放画面可知目标车辆制动尾灯点亮前的行驶速度为43 km/h。由于重新鉴定的事故车辆行驶速度更符合实际情况而被采纳。
4 目标车辆特征点与道路环境参照点不完全重合引起的误差
如实际案例2:2020年12月19日15时许,在某地十字交叉路口处,一辆小型普通客车与一辆轻型普通货车发生直角撞击事故,兩车严重损毁,驾驶人员及乘车人不同程度受伤。公安民警在调查案件中由于当事人双方对小型普通客车的行驶速度意见不一,对其责任的划分不能明确。
经公安民警调查取证,对事故目标车辆车载式视频图像原件及事故现场公安监控固定式视频图像下载提取,通过两段视频资料对目标车辆事故时的行驶速度分析鉴定。
首先利用车载式视频图像计算目标车辆行驶速度。通过对本次事故道路现场参照物进行测量,检验发现视频画面能清晰反映道路中心标线,测量标线长度为4.1 m。分析鉴定发现,在视频图像中15:50:11秒第18帧图像上,目标车辆发动机舱盖前缘与标记的道路标线起点接近重合,称之为欠重合;而在视频图像15:50:11秒第19帧图像上,目标车辆发动机舱盖前缘与标记的道路标线起点覆盖重合,称之为过重合。
在15:50:11秒第25帧图像上,目标车辆发动机舱盖前缘与标记的道路标线终点重合。(见图8)
利用车载式视频图像计算其行驶速度,经检验知视频图像的帧率为25帧/秒,则分别考虑欠重合和过重合两种情况:
欠重合状态时:
t=7×1/25=0.28 s
过重合状态时:
t=6×1/25=0.24 s
将以上参数代入公式(1)整理计算得:
欠重合状态时:
v≈14.64 m/s=52.70 km/h
取整后得53 km/h。
过重合状态时:
v≈17.08 m/s=61.49 km/h
取整后得61 km/h。
显然两种情况下速度相差8 km/h。
再利用事故现场公安固定式监控设备所下载提取的视频图像计算其行驶速度。对目标车辆参照物特征长度测量,测量前后车轮轴距为2.5 m,视频图像的帧率为25,前后轴心间隔帧数n为4,将上述参数代入公式(1)整理计算得:
v≈15.63 m/s=56.27 km/h,取整后得56 km/h。
由于公安固定式监控摄像头位于事故车辆行驶路线的侧面,所取的虚拟参照点与车辆特征点前后轮轴心完美重合,所以计算上述所得的车速相对比较准确。那么以56 km/h为基准,分别计算利用车载式视频图像计算车速时在欠重合和过重合两种状态下的相对误差:
欠重合时:
v≈52.70 km/h
相对误差为:(52.70-56)/56=-5.4%。
过重合时:
v≈61.49 km/h
相对误差为:(61.49-56)/56=8.9%。
当处于无固定式视频图像条件下,且目标车辆特征点与道路环境参照点不完全重合时,可将相邻两帧视频图像计算的结果求平均值,即(61.49+52.70)/2=57 km/h。此时刻的相对误差为(57-56)/56=1.8%。可见当无固定式视频图像时,可将车载式视频图像计算值求取平均数来处理目标车辆特征点与道路环境参照点不完全重合引起的误差,以此来完成更为客观数值的计算。
5 “以直代曲”引起的计算误差
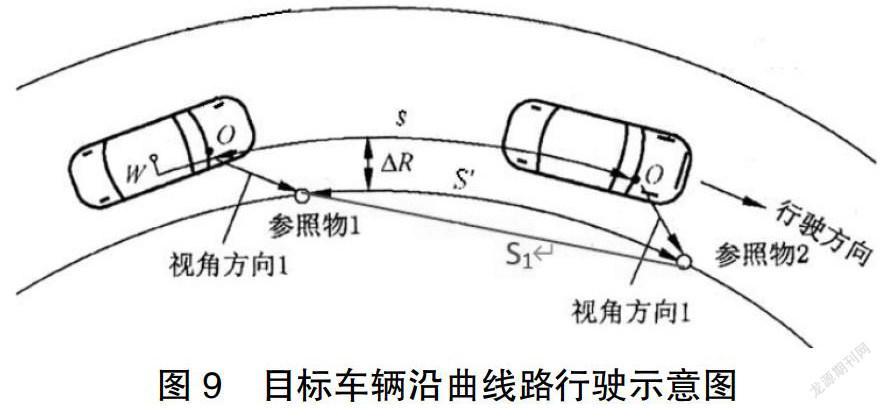
当事故车辆如图9所示沿曲线或转弯时,确定目标车辆的行驶速度v。
图9 目标车辆沿曲线路行驶示意图
在图9中,道路方向测量视频图像中两个道路环境参照物之间的距离S′,选取视频图像的某一视角方向,确定该视角与车身的交点O,记录交点沿视角方向通过两个参照物之间的时间间隔T,确定交点在路面垂直设影点O′的移动距离s,确定目标车辆质心的角速度ω和轉弯半径R,确定目标车辆的行驶速度v。
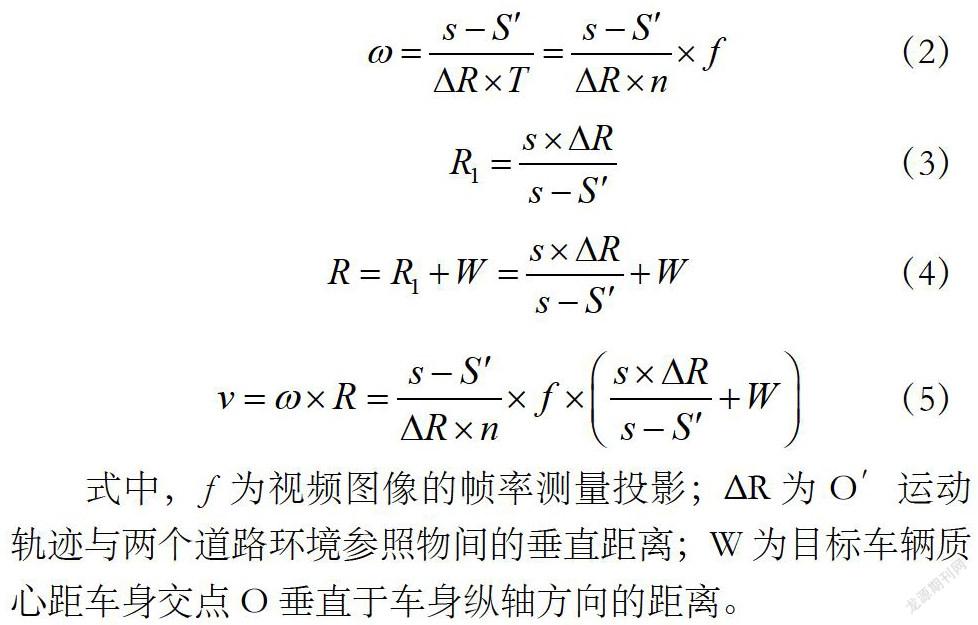
准确计算目标车辆沿曲线或转弯时的速度,可根据参考文献[3]所述步骤,依据下列公式(2)、(3)、(4)、(5)分别求出角速度ω、转弯半径R,最终计算出目标车辆沿曲线或转弯时的速度v。
式中,ƒ为视频图像的帧率测量投影;ΔR为 O′运动轨迹与两个道路环境参照物间的垂直距离;W为目标车辆质心距车身交点O垂直于车身纵轴方向的距离。
但是按照上述方法计算速度过于复杂,在实际案列中为了测量方便,往往以直线代替曲线,如图9所示,以直线S1代替S′,如此处理便引入了误差,显然计算结果会偏小于实际行驶速度。在实际案件中可将参照点之间距离分多段测量进行求和来减小实际测量误差。
6 结语
目前,道路交通事故车辆速度鉴定的方法有很多种,包括依据动力学和运动学理论的车辆速度鉴定、依据碰撞试验经验公式的车辆速度鉴定、依据模拟试验经验公式的车辆速度鉴定、依据仿真软件再现的车辆速度鉴定、依据GPS定位技术的车辆速度鉴定以及依据车辆EDR数据的车辆速度鉴定等。与上述方法相比较,基于视频图像进行车辆速度鉴定的方法具有计算简单、直观性强、实际操作高效便捷等优点。因此,在涉及车辆速度鉴定的道路交通事故处理中其使用率几乎可高达90%以上。如果能够针对每起事故的特殊性,合理选择道路环境参照物、目标车辆参照物、虚拟参照物以及观测角度,精确地确定参照距离和目标车辆的行驶距离,并结合误差理论科学地进行数据处理等,可以将由于人为因素造成的计算误差大大降低,一般可控制误差小于5%。在受到自然因素限制的情况下,如当观测视线与目标车辆行驶方向存在一定夹角时,要考虑投影效应的影响,又如在夜晚条件选取车灯作为参照点时,存在炫目影响。在实际操作中,考虑自然因素的影响,依据经验适当对计算结果进行补充修正,一般情况下也可以满足事故车辆速度鉴定的要求。
参考文献:
[1]何烈云.道路交通事故车速鉴定与仿真再现技术[M].中国人民大学出版社,2018.1.
[2]贾常明,吴文龙,王乾,等.视频方法鉴定车速的准确性研究[J].刑事技术,2020(2):160-164.
[3]公安部道路交通管理标准化技术委员会.GA/T 1133-2014,基于视频图像的车辆行驶速度技术鉴定[S].北京:中国标准出版社,2014.
