关于简单运动控制系统中的同步问题
2021-06-11王超
王超
摘要:龙门机械手、三鼓一次法成型机的贴合鼓和辅助鼓是橡胶行业常用设备,工作时对各类电机的同步控制有一定要求。本文通过分析设备的工艺流程,结合罗克韦尔Studio5000软件来说明如何实现三种同步控制,得出了伺服实轴与虚拟轴同步运行性能及程序架构优于伺服实轴之间同步,伺服电机与变频电机只适用于短时同步的两个结论。
关键词:伺服电机;变频电机;同步控制
运动控制系统中各主轴的同步问题是调试一般工业自动化项目经常遇到的主要问题之一,比如,较长工件跨越两个输送装置移动,或两部电机驱动同一机械结构移动,或轨道运输系统中多电机同步运行等,这些应用场景均需要两部或多部电机在运行时做到启停同步、速度相同、方向相同或相反等,甚至在严格要求下加速度或减速度和加加速或减减速都要相同,对机械安装精度和电机同步控制产生了一定挑战。
电机的同步按电机类型可分为多种同步关系,如伺服电机之间同步,伺服电机与变频电机同步,直流电机与直流电机同步等,实际上同步类型的数量与电机的种类多寡成正相关,可以说只要有电机应用的场景,就会有同步控制的需求出现。
1 工程概述
由于同步关系种类繁多,本文仅以龙门机械手、三鼓一次法成型机贴合鼓和成型机辅助鼓三种设备来说明典型的三种同步控制关系。龙门结构常见于工厂内部或货站用于搬运重物的行车;三鼓一次法成型机的贴合鼓和辅助鼓是用于粘贴压合轮胎各层物料的专用设备。以上设备分别代表了伺服电机与伺服电机同步,伺服电机与虚拟轴同步,伺服电机与变频电机同步的关系。以下简要说明不同类型的同步控制如何实现。
2 伺服实轴之间同步
本文例举的龙门机械手是用于轮胎成品库的专用设备,由于轮胎成品库成品胎堆放整齐紧凑,对抓取轮胎的机械手有严格的精确定位要求,因此用于驱动龙门结构动作的电机必须使用伺服电机,防止因定位不精确引起抓胎不稳,进而出现整摞轮胎歪斜或坠落,产生安全风险或影响后续转运的正常工作。
龙门机械手横梁两端各安装一部伺服电机,将其中一部电机用作运动时的主轴,另一部电机作为此电机的从轴。当设备有平移動作时,PLC启动主轴电机,使其工作在定位或点动模式下,同时给予从轴电机同步命令,使其工作在同步模式下,这样从轴电机在速度、方向和加/减速度等均可“复制”主轴电机的动作,直到同步命令解除为止。
以罗克韦尔L82 PLC和5700伺服驱动器MAG同步指令为例,指定主轴名称为X1轴(名称须与轴配置名称一致),旋转方向设定为0,同步比率设定为1等。当指令使能接通时从轴X2即可工作在同步模式,按设定参数跟随主轴X1的动作。
但此种同步控制在实际应用时,受齿轮齿条等传动机构加工精度和通讯的影响,两电机停止时位置会存在一定误差,且随运动次数的累积逐渐增加,最终造成架体与两导轨垂度差异过大,或扭矩超过正常范围,引起驱动器频繁报警。为消除这一隐患,程序中应增加从轴伺服电机自动调整位置的逻辑,即主轴完成一次动作静止后,判断主轴和从轴之间绝对位置误差,若超出设定范围则立即解除同步模式,并启动从轴电机点动运行,低速靠近主轴电机当前位置,直到主从轴位置相同或在误差范围内。如此,由种种原因造成的累积误差可以随时消除,提高设备运行的稳定性。
3 伺服电机与虚拟轴同步
贴合鼓旋转电机和运带输送电机均为伺服电机,两者间的同步是为防止未经允许的拉伸情况出现,可由实轴与实轴间的同步实现,但此种做法易使程序繁琐,且实轴之间的同步存在从轴跟随的微小误差,在运带有物料和对贴合角度有要求的情况下,无法通过自动调整的方式消除,在贴合不含钢丝的窄料步骤时易造成拉伸,影响轮胎成品质量。
经过分析试验,由虚拟轴作为主轴,贴合鼓旋转伺服电机和各层运带输送伺服电机均作为从轴的同步模式,替代实轴之间的同步模式,被证实更加的可靠。同步逻辑和参数计算只需写入虚拟轴的程序里,从轴程序只保留同步指令和参数变量。相较于实轴之间的同步,这种模式极大地精简了程序,程序结构清晰,可读性高;并且需要同步运动的两个实际伺服电机做为从轴同时启停,消除了实轴一主一从因精度和通讯延迟造成的动作配合差异,避免物料的额外拉伸情况出现,保证轮胎成品质量。
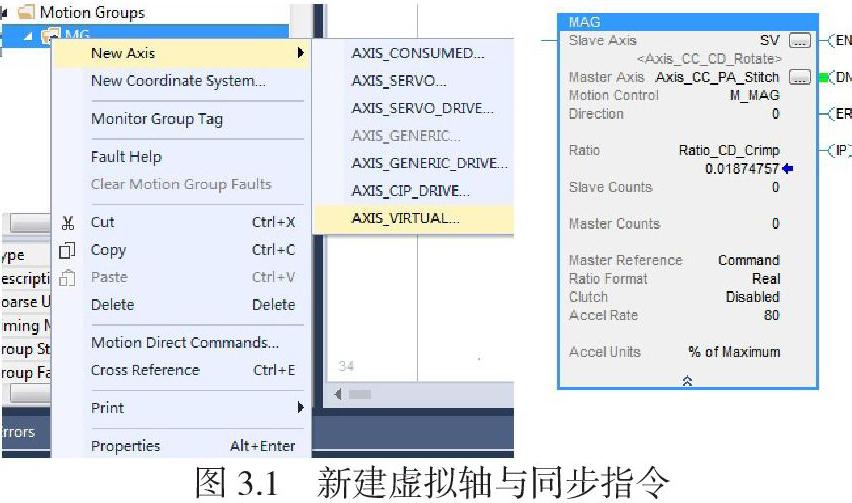
以罗克韦尔L82 PLC和5700伺服驱动器为参考,运行studio5000软件,在Motion group下新建一个虚拟轴,相关轴参数根据需要配置,同步指令MAG中Master Axis指定为虚拟轴。在不同工步给予虚拟轴不同速度、方向和目标位置等参数,给予贴合鼓旋转电机和运带电机各一个同步命令,使能同步模式,并检测从轴电机同步状态,之后使能虚拟轴;预定动作完成后解除从轴同步模式并检测,脱离同步模式后方可进行下一步动作。注意虚拟轴和实轴运算单位的统一,加/减速度保持相同。
4 伺服电机与变频电机同步
成型机辅助鼓工作原理与贴合鼓类似,旋转主轴采用伺服电机,料架运带前模板可选择伺服电机、变频电机或无动力辊均可,出于成本控制及精度要求等考虑,辅料架中部及前端模板多数选用变频电机。目前主流工控产品厂商均没有直接用于伺服电机和变频电机的同步指令,实际项目又有这样的需求,那么就要通过程序解决,以近似同步状态的动作控制使两种电机的运动尽量保持同步。
伺服电机由自带编码器反馈位置,变频电机由附加编码器反馈位置,两者要做到近似同步,速度是关键。在本例中,假设辅助鼓旋转角速度由配方设定为10r/min,鼓直径3050mm,可计算出辅助鼓当前线速度约为84.7mm/s,那么理论上变频电机运行速度设置成85mm/s左右即可,如果工艺上需要拉伸物料,可适当减小变频电机跟随速度,通过速度控制使物料在两装置间形成张力。
然而,即便变频电机与伺服电机运行参数给定完全相同,实际工作时仍然会有一定误差,而且随着时间或次数的累积逐渐增大,但因为胎坯带束层各层最终贴合长度根据轮胎规格的不同一般在3.5米以内,每一层贴合之后电机停止,物料准备到位后再次同步,误差不会累积,所以这种短时间内伺服电机与变频电机同步的解决方案运用在此类场景中是可靠的。
5 总结
常见运动控制系统的同步都可以通过以上三种方式实现,其中伺服电机实轴之间的同步可以由运行更加可靠、逻辑结构更加清晰的伺服电机实轴与虚拟轴同步的方式代替。伺服电机与变频电机的同步目前只能应用精度要求略微宽松的场景,而且时间上不宜过长,误差可由两电机停止并重启的方式消除,但对于较长工件或长时间连续运转的应用场景,此方法并不适用。只要灵活运用各品牌PLC的运动控制指令,积极消除通讯干扰和累积误差等负面因素,一般简单运动控制的同步问题均可以完美实现。
参考文献
[1] 倪敬,任旭,蒙臻.双电机机电伺服同步驱动实验系统设计[J].实验技术与管理.2019,2:101-107.
[2] 潘少平,樊柱. 双伺服同步拖动系统的分析与应用[J].金属加工:冷加工.2017,7:52-53.
[3] 郭丽,石航飞,陈志锦,杨凯,李勇. BP神经网络在双伺服同步运动系统中的应用[J].兵工自动化.2011,1:44-46.
