机电作动系统故障检测方法评估
2021-06-10贾海文
贾海文

摘要:机电作动系统属于非线性、多变量、强耦合的系统,针对该系统同种故障表现下不同故障模式设计了故障检测方法,通过故障检测率,误报警率,鲁棒性等指标对固定阈值和自适应阈值的故障检测系统进行了评估。最后基于机电作动系统三闭环Simulink模型,验证了评估方法的有效性。
关键词:EMA;故障检测;故障检测方法评估
中图分类号:V242.5 文献标识码:A 文章编号:1001-5922(2021)01-0118-05
随着机电作动系统(EMA)的应用,去除了飞机上大量的液压回路,有利于飞机维修和减轻了飞机重量。然而,新的故障和安全性的不足阻碍了EMA在主飞行控制执行机构中的大量使用。依据Moog公司提供的故障模式,影响和关键性分析(FMECA故障模式及影响分析)信息、美国军方发布的工业信息和执行器相关故障文献追踪,将机电作动系统故障模式分为:传动机构故障、驱动电机故障和传感器故障。
针对以上故障模式,国内外学者分别基于不同方法进行了故障检测。2016年Ismail M A,Balaban E等人提出了一种新的基于振动的混合技术,用于检测EMA滚珠丝杠卡阻和滚珠碎裂故障,主要是通过比较丝杠健康理论值与EMA测试台实验值进行比较。从而判断故障是否发生。Chirico等人研究了基于EMA的“数据驱动故障檢测技术”在EMA滚珠丝杠中设置两种不同剥落尺寸的剥落断层,使用贝叶斯分类器通过振动和电流两个条件指标来识别故障。Ismail等人开发了基于EMA的故障检测和量化技术,直接检查在测试台上收集的振动数据,以确定和表征健康状况,确定对振动数据执行高分辨率角度重采样(以消除速度波动)使得可以检测和测量EMA滚珠轴承中的剥落的严重性。然而,上述检测方法虽然具有一定的有效性,但对各种扰动比较敏感,例如,操作条件,数据的扰动和传感器的测量,将会限制其在航空航天领域的应用。
Romeral L,Rosero J A等人结合基于模型的故障检测神经网络技术与FFr分析技术,对电机绕阻短路故障和转子静态偏心故障进行检测Ossmann D等人通过应用离散小波变换(DWT)—监测PMSM(永磁同步电机)电流,来检测和诊断电气(短路:相与地之间或相与相之间)和机械(偏心)故障。虽然,傅立叶变换(STFT)等技术可以对不同的频率和时间进行分析,但其仅适用于系统处于稳态的时候。而在真实飞行状态中,EMA工作在一个非稳态环境中,所以在检测时只能依赖于小波分析。然而基于信号处理的方法在飞机上的应用误报警率比较高。针对EMA传感器故障,Wang J等人设计了一种基于z检验的故障检测程序来实现角位移传感器的自我诊断,并且通过卡尔曼滤波估计调整解算器的不匹配故障来实现故障调节,但并没有考虑噪声和外部干扰。2009年Balaban E,Saxena A等人研究了传感器的不同故障模式,并设计了基于人工神经网络(ANN)的诊断系统。该方法不仅可以检测各种故障模式,而且可以区分传感器和系统故障。最后通过在机电作动器已有的实验数据中注入偏置、漂移、缩放等故障模拟来检测该方法的有效性。不足之处是,专家系统需要强大的数据支持和丰富的维修经验,而机电作动系统在民机上的应用属于—个全新的领域,使用时间和应用范围有限,所以基于专家系统故障检测方案还需要不断的完善。
考虑国内外有关机电作动系统故障检测,发现对检测方法的评估研究相对较少。因此本文采用了未知输人观测器,把建模的不确定性、外部干扰和测量噪声看作是系统的未知输入,使其从残差中完全解,并对自适应阈值与固定阈值两种判定方法进行了评估。
1机电作动系统建模与故障建模
本文所研究的无刷直流电机为二相导通星形三相六状态。
1.1电压平衡方程
3故障检测方法评估
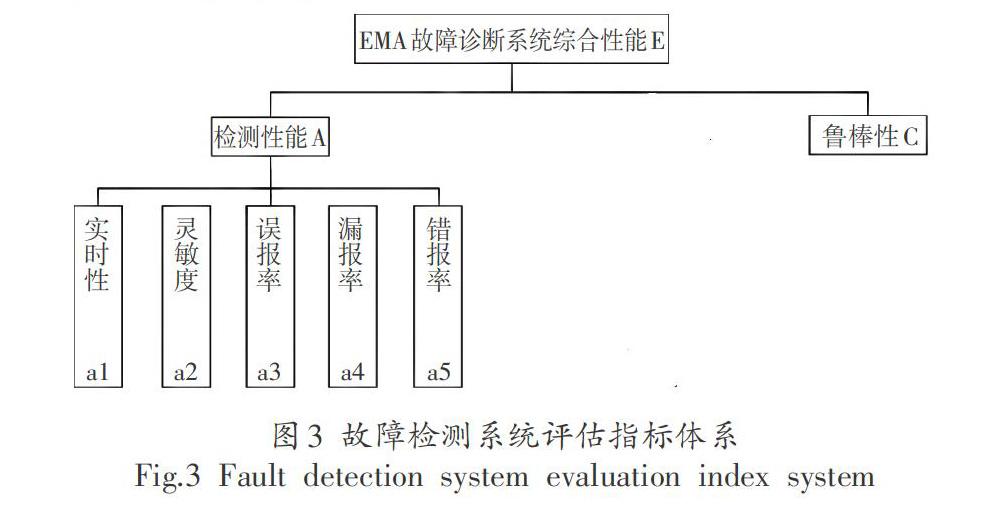
机电作动系统运行环境复杂,动态变化剧烈,一旦受损或者卡死,飞行品质会剧烈下降甚至坠机。因此,故障检测系统的目标就是以最短的时间检测出故障并且分离故障,给机组留出足够的时间采取措施。因此,本节以检测性能指标、诊断性能指标和鲁棒性3大类指标作为标准,来评估上述故障检测系统的性能。其结构如图3所示:
实时性:指当系统发生故障时,故障检测系统在要求的时间内,以尽量短的时间检测到故障;灵敏度:指故障检测系统对轻度故障的检测能力;误报率:指系统没有发生故障,检测系统却报警;漏报率:指系统出现了故障,检测系统却没有检测出来;错报率:故障定位错误和报警时间错误;鲁棒性:指检测系统在存在噪声、干扰和建模误差的情况下,还能保持满意的实时性、误报率和漏报率等性能指标。
上述指标分别从不同的方面对故障检测系统做出了评估,然而对于不同类型的系统,这些指标偏重程度是不一样的,比如飞控机电作动系统,实时性和分离能力是故障检测系统的关键所在。所以在利用上述指标对故障检测系统进行性能评价时,要明确哪些性能是主要的,哪些是次要的。本节利用权重来评估每个指标相对于总体性能作用大小的量化值,但是确定权重又有一定的难度,因为他们不但包含有评估客体因素还包括评估主体因素,因此,一个指标的重要程度主要受下列4种因素影响:①评估组织者对该指标的重视程度;②该指标值所反映的信息量;③指标间的相互影响;④该指标评估结果的可靠程度。
常用的系统评估指标量化方法有:体操计分法、两两比较法、自顶向下法等。本节采用两两比较法来确定各个指标的相对权重,构造如表1所示的评估指标相对重要性判断表。
鲁棒性的权重之所以比较大,是因为一种故障检测算法,即使检测性能再好,如果对建模误差和外界干扰没有鲁棒性,就失去了实际工程价值。飞控机电作动系统是多变量、强耦合的机电一体化复杂系统,由于安装调试误差、制造工艺等因素的影响,在系统建模时总会出现建模误差,再加上飞机飞行环境的复杂性,因此鲁棒性成为了最重要的性能指标。
4各评估指标量化值
对于图3中的各评估指标,如漏报率、误报率这样的指标容易给出定量结果;但在大多数情况下,像鲁棒性、实时性和灵敏度很难给出一个定量的描述,只能给出定性评估结果。因此,在这里对定性指标进行量化,结果如表2所示。
在比较鲁棒性这一指标时,设置相同的噪声及建模误差,分别应用于固定阈值和自适应阈值两种判别方式上进行比较,来判定哪种方式的鲁棒性好。针对上述其他指标评估时,以传感器偏置故障为例,采用计算机仿真方法在一定时间内随机注人不同程度的故障,从而得到相应的故障检测率。由图4所示,可以看出输人故障数大于200时故障检测率稳定于90%左右。因此下文选取故障数为350来计算其余指标。
系统叠加的噪声是分别是信噪比(sNR)为5、6、7的高斯白噪声。各指标评估结果如表3~5所示。
5综合评估结果
通过上小节固定阈值和自适应阈值在不同噪声环境下的对比结果可以看出,自适应阈值在检测率、灵敏度方面明显优于固定阈值;实时性能变化不明显;基于上述分析的评估结果如表6所示,该表内容是对比意义下的结果,没有绝对性。
6评估结果分析
由以上分析结果可以得出,当系统叠加信噪比为5的高斯白噪声时,固定阈值的检测率达到90%左右,相比自适应阈值而言设计上容易实现。但是随着的信噪比值的增加,漏报率从9%增加到了42%,检测性能下降严重,无法平衡漏检率和误报率,致使其综合性能值不高仅为4.96。相比而言,采用自适应阈值代替固定阈值,检测性能各指标明显优于固定阈值,评价分数升为12,随着信噪比值的增加,检测性能各指标也有一定的下降,其中漏报率增加较明显,但相对缓慢,所以其总体性能值为6.4>4.96,相对固定阈值不足之处为设置相对复杂,且阈值计算效果比较依赖残差的敏感度。因此,自适应阈值相比固定阈值可以同时兼顾检测率与虚警率,且对外界扰动具有一定的抗干扰能力,但是在自适应阈值的设计上需要额外设计一个残差生成器且需要对残差进行区间估计,所以自适应阈值的好坏与系统动态模型的精度密切相关。相比而言固定阈值的选取更加简单,只需要通过观察正常状态残差的最大值即可,省去了系统建模,对于复杂系统在工程上更容易实现。