一种在线建模信号分段调控的有源噪声控制算法
2021-06-10肖梦迪陈卫松
肖梦迪,陈卫松,吴 慧
(安徽师范大学 物理与电子信息学院,安徽 芜湖241000)
0 引言
随着工业的发展和各种机器设备的应用,噪声问题对人们生活的影响也日益显著。噪声治理的措施主要有无源噪声控制和有源噪声控制两类。有源噪声控制主要应用于低频噪声控制领域。它通过次级通道在降噪区域产生与噪声源幅度相同、相位相反的信号,利用声波相消干涉的原理,达到噪声控制的目的[1-2]。FxLMS算法常用于有源噪声控制的次级通道建模环节。由于次级通道通常是时变的,而在线建模具有实时性,将其应用于有源噪声控制领域,可以实时调节次级通道参数,得到更好的降噪性能[3]。
Akhtar提出一种改进的次级通道在线建模FxLMS算法,利用变步长算法(VSS-LMS)更新建模滤波器的权值,改善了定步长算法中系统建模误差较大的问题[4]。不足之处在于,该算法未考虑建模后期建模信号对控制信号的影响,因此算法降噪性能略受影响。基于此,张丽等人提出一种梯度下降的次级通道建模算法,由建模误差构成检测函数,对建模步长值进行梯度控制,使系统根据实际建模效果来调节建模步长值,取得了良好的建模效果[5]。Pucha等人提出一种新的FxLMS/F算法,将主控制滤波器的更新方式与凹函数相结合,改进主控制滤波器的更新公式。该算法避免了复杂的梯度建模过程,在宽带低频噪声控制方面有一定的优势[6]。以上算法均未考虑附加建模信号对主控制模块的影响,因此算法的降噪量受到影响。
为减弱附加建模信号对主控制模块的影响,Sun等人提出一种根据误差值来调节附加信号能量的策略,由误差值构成的遗忘因子与辅助噪声控制条件相结合,使附加信号的能量随误差值的减小而减小,降低了附加信号对系统降噪性能的影响[7]。Ahmed等人提出对附加信号能量进行控制的建模方法。将附加信号分为两个阶段,在建模起始阶段附加信号能量较大,建模滤波器的收敛速度快;当滤波器接近收敛状态时,减弱附加信号的能量,即进入控制的第二个阶段[8]。该算法使建模滤波器获得较快的收敛速度和较低的建模误差。Chang等人通过增加滤波器,利用滤波器组将噪声源分割成不同频段的信号,在不同频段内分别进行降噪处理,同时通过带通滤波器控制附加信号的能量,使附加信号的能量由系统的误差值决定,避免附加信号对系统的影响[9]。Xiao等人提出一种新的附加噪声控制策略。根据系统的误差值设置阈值,将建模步长进行分段调控,当误差减小一定值时,停止注入附加信号,有效地减弱了其在建模后期对系统降噪性能的影响[10]。Pu等人利用系统残余误差和建模误差的比值来调节附加信号的能量,使其随误差比值呈由大到小的变化趋势。该算法控制过程简洁,计算量较小,因此也适用于多通道有源噪声控制中[11]。Pradhan等人提出去相关控制的在线建模算法[12-13],将有源噪声控制系统分为5个部分,分别设置对应的开关,使得建模过程与主控制过程互不干扰,提升了系统的收敛速度和降噪性能。
1 文献[14]算法
文献[14]算法框图如图1所示。该算法通过主控制滤波器W(n)和建模滤波器S(n),利用VSS-LMS将误差信号e(n)降到最低。其中,x(n)为噪声源即输入信号,P(n),S(n)分别为初级通道和次级通道。d(n)为x(n)通过初级通道产生的期望信号,f(n)为建模误差,如式(1)所示。ρ(n)为f(n)与e(n)的能量之比,如式(4)所示。G(n)为附加建模信号v(n)的控制条件。该算法主要通过能量比对建模信号进行调控,具体控制过程为:在降噪初始阶段,主控制模块能量较大,会影响次级通道的建模过程。随着系统的逐渐收敛,控制模块能量降低,建模环节对控制模块影响变大,因此用于控制模块主滤波器更新的步长值μw应逐渐减小,如式(5)所示,建模步长值μs应逐渐增大。但当建模误差收敛到一定值时,较大的建模步长值又会影响系统建模精确性,因此建模步长应呈由大到小的变化趋势。前期建模步长值逐渐增大,如式(6)所示[14]。后期通过能量比ρ(n)与tanh函数相结合的方式进一步减小步长值,如式(7)所示。其中C(n)为判断步长值是否下降的检测函数,如式(8)所示,其中μs(n)是系统第一阶段的步长值,μs1为系统第二阶段的步长值。
(1)
Pe(n)=λPe(n-1)+(1-λ)e2(n),
(2)
Pf(n)=λPf(n-1)+(1-λ)f2(n),(0.9<λ<1),
(3)
(4)
μw=β(exp(∂ρ2(n))/ε+x(n)x(n)′),
(5)
μs(n)=μ1lg(aρ(n)ρ(n-1)+b),
(6)
(7)
C(n)=(S)2。
(8)

图1 文献[14]算法框图Fig.1 Algorithm block diagram of Ref [14]
当系统达到稳定状态时,μw,μs均收敛于某个特定范围。若继续注入附加建模信号会影响系统的降噪量,因此利用系统的步长值判断是否继续注入附加信号,控制过程如式(9)和式(10)所示,其中μ1是固定值,为算法未对附加建模信号进行控制,系统收敛时的步长值[15]。
(9)
(10)
2 改进算法

(11)
(12)

图2 改进算法框图Fig.2 Block diagram of improved algorithm

Px(n)=λPx(n-1)+(1-λ)x2(n)。
(13)
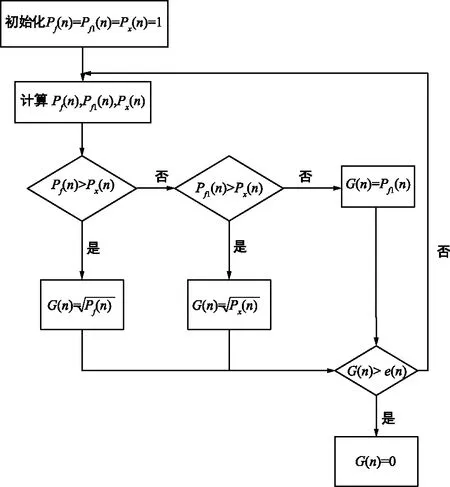
图3 改进算法流程图Fig.3 Flow chart of improved algorithm
3 算法仿真分析
为验证改进算法的性能,选用变压器噪声作为噪声源,其归一化后的频谱图如图4所示,可见变压器噪声主要表现为宽带低频噪声。选用降噪量R和建模误差ΔS作为衡量算法性能的指标。降噪量R反映系统的降噪效果,表达式如式(15)所示。建模误差ΔS反映系统在线建模的收敛性及精度,表达式如式(14)所示。初级通道P(n)和次级通道S(n)为物理通道,在实验时用传递函数来模拟这两个通道,通道的函数表达式如式(16)所示,其中参数hk按文献[5]设置。变压器噪声不同于混频噪声,其频谱分量较多,在仿真实验前应先优化滤波器阶数和建模步长更新函数的参数值,经仿真实验可得,算法参数如表1所示。
(14)
(15)
(16)

图4 变压器噪声频谱图Fig.4 Frequency spectrum of transformer noise

表1 算法参数的选取
其余参数按文献[14]设置。调整相关参数后,建模误差仿真结果如图5(a)所示。由图可见,改进算法的建模误差收敛到-30 dB以下,此时次级通道参数已经基本收敛到真实值,且改进算法具有相对较快的收敛速度。图5(b)为降噪量仿真结果,文献[14]中对附加噪声的控制仅考虑系统残余误差与建模误差的比值,未考虑到系统初级声源能量大小对自适应滤波器更新的影响,因此当噪声源频谱分量较多时,容易导致算法发散。
文献[5]中梯度下降的判断条件及下降后所采取的步长值均为经验因子,当噪声源发生变化时,原定步长值已不适用,从而导致文献[5]和文献[14]中的算法均出现不同程度的发散,因此这两种算法对于频谱分量较多,即频谱较宽的噪声源控制效果较差。当迭代至30 000次时,改进算法达到约18 dB的降噪量,且仍呈缓慢上升趋势。文献[5]在梯度下降的第二至第三阶段使用定步长值进行步长下降,因此文献[5]在第一次梯度下降后,降噪量便不再增加,从而导致该算法降噪量较低。文献[14]中的算法因对附加噪声采取“切断式”控制,对于频率集中分布即窄带噪声较为适用,当噪声源更换为频谱分量较为丰富的信号时,会出现算法在尚未达到理想降噪效果时,就切断建模信号的现象,从而导致系统降噪量偏低。改进算法则对不同的噪声源有较强的普适性。

(a) 建模误差对比

(b) 降噪量对比图5 算法仿真结果对比Fig.5 Comparison of algorithm simulation results
4 结论
本文提出一种对在线建模信号进行分段调控的有源噪声控制算法,算法所需建模信号采用分段调控的策略。改进算法通过调整建模信号的控制方法减小控制模块和建模模块的相互影响。仿真实验表明,对变压器噪声源这类频谱分量较多的宽带低频噪声,改进算法提高了控制系统的降噪量,减小了主控制模块和建模模块的相互干扰,控制效果优于同类算法,提升了系统的降噪性能。由于改进算法对附加噪声的控制方式较为繁琐,算法计算量相对较大,增大了硬件实现的难度,还需要在降低计算量方面进一步调整和优化。
