APP下载
搜索
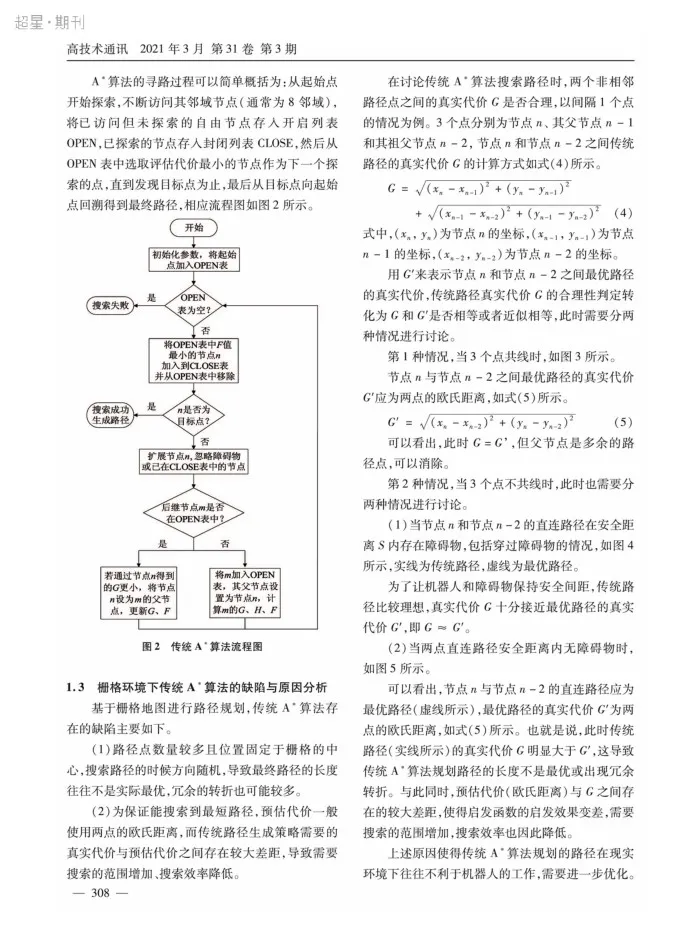
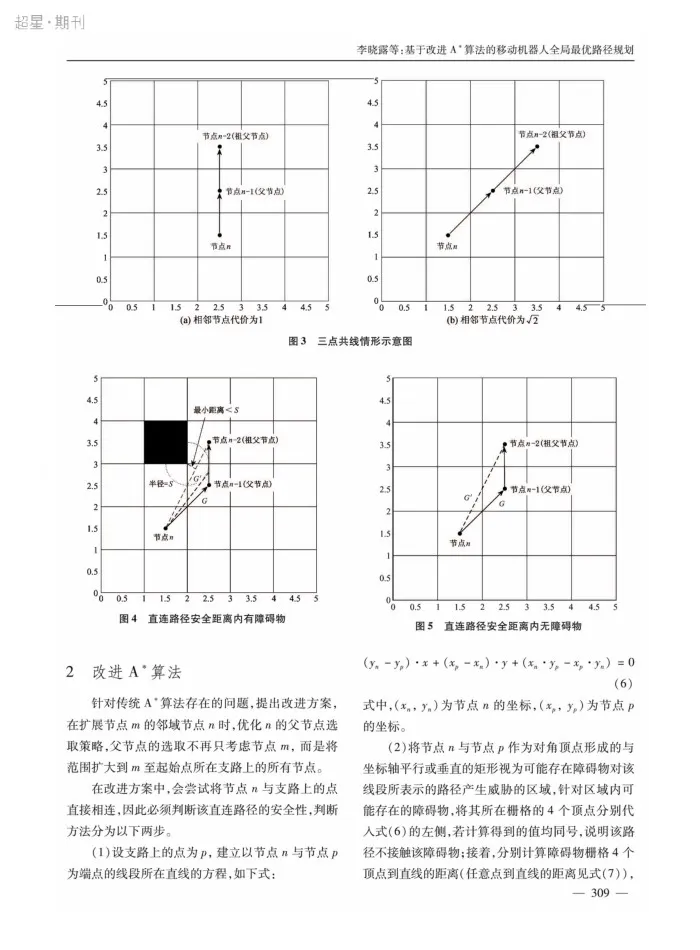
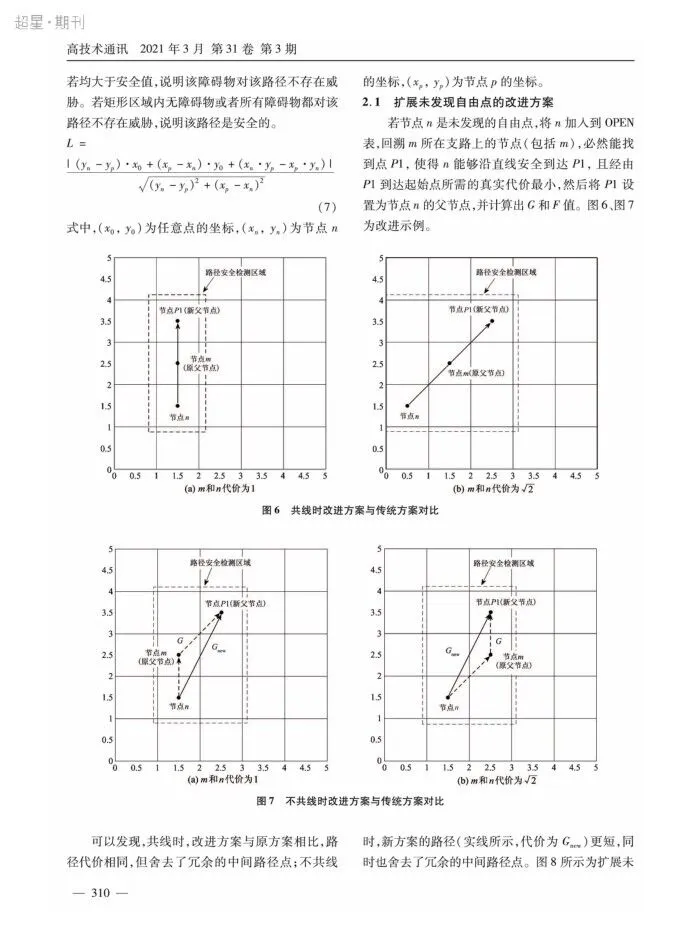
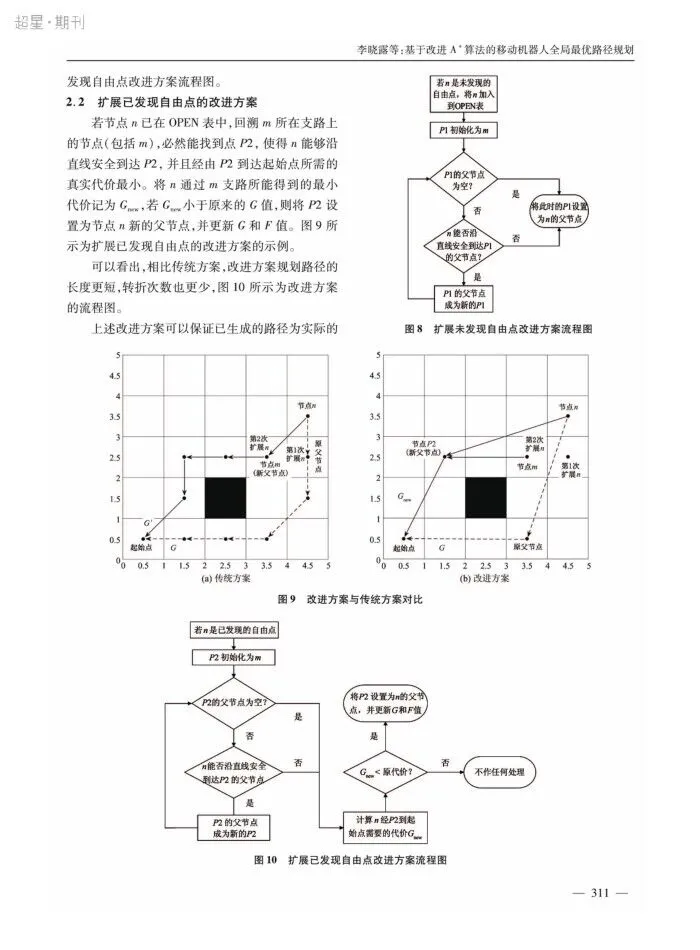
基于改进A*算法的移动机器人全局最优路径规划
2021-06-09
李晓露,熊禾根,陶永
等
高技术通讯
订阅
2021年3期
收藏
关键词:
移动机器人
全局
规划
猜你喜欢
移动机器人
全局
规划
Cahn-Hilliard-Brinkman系统的全局吸引子
移动机器人自主动态避障方法
量子Navier-Stokes方程弱解的全局存在性
落子山东,意在全局
规划引领把握未来
快递业十三五规划发布
基于Twincat的移动机器人制孔系统
多管齐下落实规划
迎接“十三五”规划
新思路:牵一发动全局
杂志排行
《青年文学家》
2024年9期
《国际展望》
2024年3期
《东方企业家》
2024年5期
《世纪人物》
2024年5期
《中国检察官·司法务实》
2024年3期
《小学教学研究·教研版》
2024年3期
《中国检察官·经典案例》
2024年3期
《中小学德育》
2024年4期
《清华大学教育研究》
2024年1期
《湛江文学》
2024年2期
高技术通讯
2021年3期
高技术通讯
的其它文章
适用于MAUV的变基线定位系统
粘滞阻尼器抑制斜齿圆柱齿轮轴系振动实验研究
基于支持向量机和改进蚁群算法的移动机器人路径规划
采用改进D-S证据融合的动力型假肢运动模式预识别
基于SBAS-InSAR技术的巨野煤田沉降监测
《高技术通讯》作者投稿指南