毫米波雷达角度分辨力测试方法研究
2021-06-04武丹丹刘洪伟吴飞燕
武丹丹,刘洪伟,吴飞燕
(中汽研汽车检验中心 (天津)有限公司,天津 300300)
车载毫米波雷达作为驾驶辅助的重要环境感知传感器,其性能、功能的评价方案一直是主机厂关注的重点,且随着国内毫米波雷达技术的逐步提升,越来越多的评价指标得到公布。如何整理出一套行之有效的毫米波雷达性能、功能测试评价体系,是目前毫米波雷达行业的迫切需求,也是推动国内毫米波雷达产品技术发展,规范智能驾驶汽车环境感知策略的重要手段。
就产品层面,24GHz毫米波雷达技术不管是欧美还是国内,都较为成熟,且国内已将24GHz频段停用,因此24GHz毫米波雷达的研发及测试需求基本停滞。76~77GHz毫米波雷达性能较24GHz毫米波雷达,穿透性更强,识别距离显著提升,是目前车载毫米波雷达行业的主流产品,而77~81GHz毫米波雷达更倾向于成像雷达,且目前产品较少,多数处于试验室开发样机阶段。
在标准层面,ETSI系列标准详细规定了毫米波雷达测射频参数要求,但未对毫米波雷达的探测功能及应用场景做出任何规范,国内无线电管理委员会单独出具了国家推荐性标准,就毫米波雷达工作频段及杂散限值做出定义,也不涉及毫米波雷达的应用参数。
就测试参数层面,毫米波雷达的目标识别,围绕着目标物的大小及空间位置进行测试,也就对应着目标的RCS、距离、速度和角度。目标的RCS,即目标的反射截面积,可通过毫米波反射信号的衰减实现参数标定。
基于毫米波雷达功能实现原理,从毫米波的反射时间模拟目标距离,从反射信号的多普勒参数特性层面模拟目标速度,进而实现毫米波雷达距离准确度以及速度准确度的测试,是目前较为成熟且被行业广泛接受的测试方案。基于上述原理应运而生的毫米波雷达目标模拟器,使得毫米波雷达的测试由实车道路测试转向了试验室仿真测试,进而使得毫米波雷达的距离分辨力和速度分辨力的理想场景搭建及测试成为了可能。
目标的角度准确度测试,通过待测雷达的转动或者目标物的转动实现毫米波雷达识别目标角度的多场景对比测试,与实际应用情况较为贴切。毫米波雷达角度分辨力,从定义上分析,即在规定条件下,雷达能够区分目标的最小间隔,进一步可详细理解为相同RCS、距离、速度的两目标由同一角度以毫米波雷达为圆心向两侧做圆周运动,直至毫米波雷达将其区分为两个目标,该最小区分角度即为毫米波雷达的角度分辨力。目标的RCS、距离、速度、角度对毫米波雷达角度分辨力测试的具体影响,目前均不明确,雷达角度分辨力测试涉及因素的复杂多变,使得该项目测试方案的成型面临较大的挑战。例如,对于一定角度的两个目标,目标纵向距离增大,两目标之间的横向距离必然增大,通过在双目标角度固定、纵向距离增大等场景下,对毫米波雷达角度分辨力测试结果进行分析,可直观确定雷达角度分辨力测试中距离等因素对测试结果的影响,也是形成毫米波雷达角度分辨力测试方案的重中之重,也是推进毫米波雷达测试评价体系成型的重要一环,因此本文通过分析毫米波雷达角度分辨力测试中各因素对测试结果的影响,提出毫米波雷达角度分辨力测试方案。
1 雷达角度分辨力测试设备
毫米波雷达分辨力测试,分为实际目标的场景测试和模拟目标的实验室仿真测试。实际目标的场景测试,通过在道路试验场中由两个特定距离、特定RCS的角锥反射器做圆弧运动实现,该实验方式受试验场地、角锥反射器参数以及试验操作的限制,目前还无法进行试验参数的定量对比,也无法进行目标速度的附加测试,因此本文通过目标模拟器进行模拟目标的试验室仿真测试,角度分辨力测试环境如图1所示。
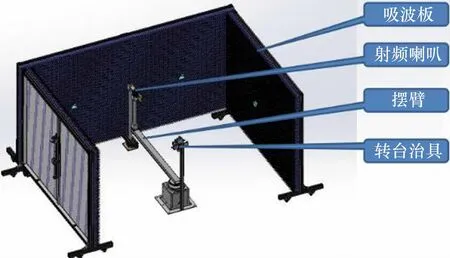
图1 毫米波雷达角度分辨力测试环境设计图
毫米波雷达角度分辨力测试设备包括:雷达目标模拟器、转台摆臂以及吸波板。如图2和图3所示,目标模拟器具备双通道,转台摆臂有两个,可同轴心转动,两个目标发射天线通过两个同轴心的转台摆臂实现目标角度的分离;吸波板为拼成U型遮挡在待测毫米波雷达左右两侧及前方的屏蔽钢板和附在钢板内侧的吸波材料。
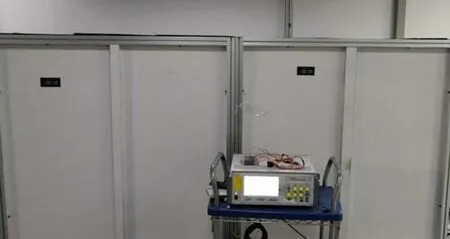
图2 目标模拟器测试状态图
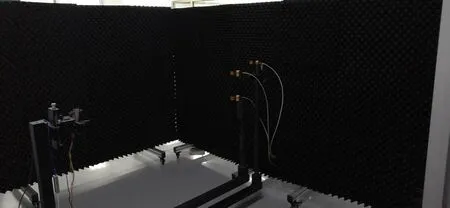
图3 毫米波雷达角度分辨力测试环境图
2 雷达角度分辨力测试方案
毫米波雷达角度分辨力分为水平角度分辨力和竖直角度分辨力。水平角度分辨力应用于道路交通过程中毫米波雷达前方多辆汽车、多个行人、多台两轮车等目标之间的角度分辨,也是日常生活中较为常用的角度分辨场景。竖直角度分辨力应用于隧道、路杆等位于车辆上方障碍物的识别,本文以FMCW角雷达的水平角度分辨力为例,提出毫米波雷达角度分辨力测试方案。
2.1 距离
距离是毫米波雷达目标探测的重要指标,亦是车载毫米波雷达实现碰撞预警、盲区检测等结果输出的重要参考指标。距离对毫米波雷达角度分辨力的影响表现为相同速度、角度、RCS的目标,当距离不同时测得的角度分辨力不同。
基于不同距离的角度分辨力测试,步骤如下:①毫米波雷达模拟装车角度,固定在转台摆臂圆心的正上方,在雷达目标模拟器上设置两个RCS均为10dBsm(或20dBsm)并带有一定速度的目标,位于距离D1,两目标天线 (目标A和目标B)通过转台摆臂一上一下正对毫米波雷达前端 (毫米波雷达信号发射端)固定,其极化方向与毫米波雷达前端的极化方向一致,此时目标A和目标B均处于毫米波雷达法线方向,毫米波雷达输出为一个目标;②将目标A和目标B的角度分别以0.1°步进值朝相反方向对称远离,直到毫米波雷达输出为两个目标,记录此时两个目标与被测雷达的角度值θd1;③关闭目标模拟器的目标输出,将目标A和目标B均恢复至法线方向,再将目标A和B的距离设为D2,重复步骤②,记录目标A、目标B与被测雷达的角度θd2;④重复步骤③,共测试N组 (N≥5)数据,并记录数据。
2.2 速度
毫米波雷达的速度探测,基于反射信号的频偏实现,目标速度的大小体现在目标靠近或远离车本体的快慢。速度对毫米波雷达角度分辨力的影响表现为相同距离、角度、RCS的目标,当速度不同时测得的角度分辨力不同。
基于不同速度的角度分辨力测试,步骤如下。
1)进行步骤①,其中目标的速度设为V1。
2)将目标A和目标B的角度分别以0.1°步进值朝相反方向对称远离,直到毫米波雷达输出为两个目标,记录此时两个目标与被测雷达的角度值θv1。
3)关闭目标模拟器的目标输出,将目标A和目标B均恢复至法线方向,再将目标A和B的速度设为V2,重复步骤2),记录目标A、目标B与被测雷达的角度θv2。
4)重复步骤3),共测试N组 (N≥5)数据,并记录数据。
2.3 角度
目标距离的很小变化即可导致距离FFT或多普勒FFT峰值的相位变化,这是毫米波雷达角度估算的基本原理,而角度准确度会随着测量角度的增大,准确度降低。不同毫米波雷达的FOV是不同的,毫米波雷达是否对在不同角度方向上的目标具有相同的角度分辨力,需要通过测量确定。
基于不同角度的角度分辨力测试,步骤如下。
1)进行步骤①,此时目标角度为θ1=0°。
2)将目标A和目标B的角度分别以0.1°步进值朝相反方向对称远离,直到毫米波雷达输出为两个目标,记录此时两个目标与被测雷达的角度值θJ1。
3)关闭目标模拟器的目标输出,将目标A和目标B均恢复至θ2方向,重复步骤2),记录目标A、目标B与被测雷达的角度θJ2。
4)重复步骤3),共测试N组 (N≥5)数据,并记录数据。
2.4 RCS
RCS大小的不同,表现为毫米波雷达探测目标反射截面的大小,对于不同RCS的模拟目标,其角度分辨力的测试步骤如下。
1)进行步骤①,此时目标RCS为Q1。
2)将目标A和目标B的角度分别以0.1°步进值朝相反方向对称远离,直到毫米波雷达输出为两个目标,记录此时两个目标与被测雷达的角度值θQ1。
3)关闭目标模拟器的目标输出,将目标A和目标B均恢复至法线方向,重复步骤2),再将目标A和目标B的RCS设为Q2,记录目标A、目标B与被测雷达的角度θQ2。
4)重复步骤3),进行RCS为0dBsm、10dBsm和20dBsm的测试,并记录数据。
3 雷达角度分辨力测试结果展示
3.1 距离
距离对毫米波雷达角度分辨力影响的测试结果见表1。

表1 距离对毫米波雷达角度分辨力影响
表1中毫米波雷达的角度分辨力为2×θdi,由表1中数据可观察出,在目标模拟测试的情况下,角雷达的角度分辨力随着距离的增大而减小。
3.2 速度
速度对毫米波雷达角度分辨力影响的测试结果见表2。
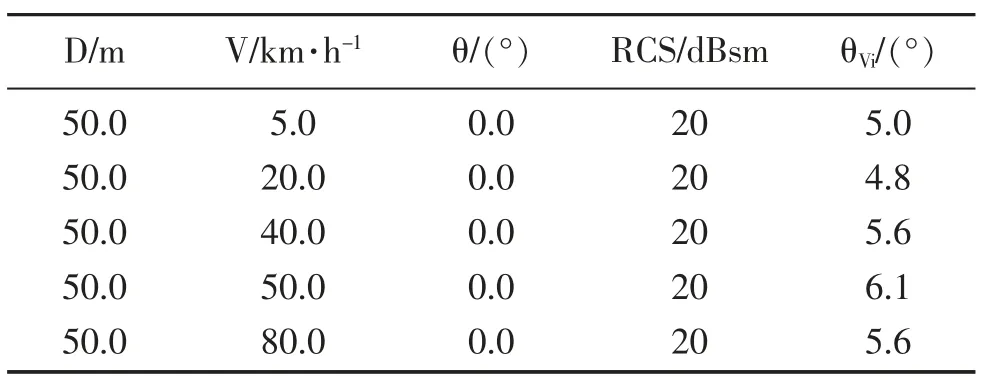
表2 速度对毫米波雷达角度分辨力影响
表2中毫米波雷达的角度分辨力为2×θVi,由表2中数据,可观察出随着目标速度的增大,角度分辨力在一定范围内呈现不规律变化,且波动幅度不大。
3.3 角度
角度对毫米波雷达角度分辨力影响的测试结果见表3。

表3 角度对毫米波雷达角度分辨力影响
表3中毫米波雷达的角度分辨力为2×θJi,由表3中数据,可观察出随着目标角度的变化,毫米波雷达角度分辨力仍在一定范围内波动,即目标角度的变化不影响毫米波雷达角度分辨力的测试结果。
3.4 RCS
RCS对毫米波雷达角度分辨力影响的测试结果见表4。
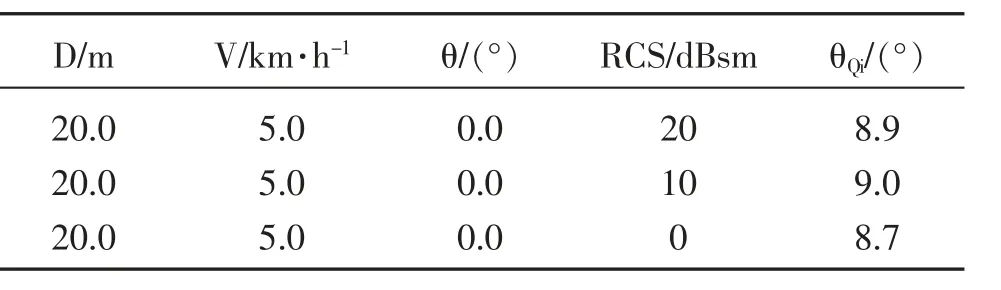
表4 RCS对毫米波雷达角度分辨力影响
表4中毫米波雷达的角度分辨力为2×θQi,由表4中数据,可观察出RCS的变化,不影响毫米波雷达角度分辨力的测试。
4 结论
本文从毫米波雷达目标识别性能影响因素入手,在目标模拟器模拟目标的仿真试验条件下,通过对变量及结果的横向对比,分析距离、速度、角度、RCS对毫米波雷达角度分辨力测试结果的影响。从上述数据可得出距离是毫米波雷达角度分辨力测试的变量,而速度、角度、RCS对毫米波雷达的测试基本无影响。毫米波雷达角度分辨力测试方案可基于此结论,以不同目标距离,分组对毫米波雷达角度分辨力进行测试。而从角度分辨力的计算原理可知,毫米波雷达的角度分辨力仅与天线个数有关,因此雷达目标模拟器的模拟仿真测试、不同型号间毫米波雷达的性能区别、仿真测试与真实目标的道路试验之间的测试结果区别,仍需进一步地研究与探讨。
