相控阵二次雷达的多任务协同工作效率评价方法研究
2021-06-03四川九洲电器集团有限责任公司
四川九洲电器集团有限责任公司 夏 明
四川九洲空管科技有限责任公司 彭杰文
在相控阵二次雷达的多任务协同工作时,我们需要根据项目实际应用环境,设计相应的软件算法来满足用户的需求。然而在设计算法的过程中,我们往往缺乏对其进行量化的评价。为了规范和优化我们的多任务协同调度算法设计,本文提出一种多任务协调调度效率评价方法,并对该方法进行了说明和介绍。通过理论分析和实际应用介绍,验证了该方法的可行性和合理性。
相控阵二次雷达经过不断的迭代发展,已经具备区域分级监视、目标牵引识别、补盲跟踪等多种任务协同工作能力。为了能够高效的利用相控阵二次雷达进行工作,我们常常根据二次雷达应用平台和场景的实际情况去设计多任务协同调度算法。假如我们设计了多种任务调度算法均能满足功能性能要求,我们如何去选择更有效的算法,这需要我们对算法的效率进行合理的评价。本文主要讨论相控阵二次雷达多任务协同调度效率评价的方法。
1 任务分类及说明
相控阵二次雷达多任务工作一般包括:普通区域监视任务、重点区域监视任务、目标牵引识别任务、补盲跟踪任务四种。
普通区域监视任务用于满足用户掌握周边普通区域的空情,该任务执行常以周期触发形式存在,刷新周期较长,优先级一般;
重点区域监视任务用于满足用户掌握周边重点区域的空情,该任务执行常以周期触发形式存在,刷新周期较短,优先级较高;
目标牵引识别任务用于满足用户对某一区域位置上的目标进行身份识别,该任务主要用于配合其他探测设备进行工作,其任务执行常以事件触发形式存在,优先级最高;
补盲跟踪任务用于满足用户对目标探测信息不连续时进行二次确认,主要起查漏补缺的作用,该任务主要在周期触发的任务结束后由调度算法自动生成,其任务执行常以事件触发形式存在,优先级最低。
2 多任务效率评价方法
2.1 参数设置及说明
本文根据相控阵二次雷达常用的任务划分方式,设定不同任务分值参数。
目标牵引识别任务:sq分;重点区域监视任务:sz1分;普通区域监视任务:sz2分;补盲跟踪任务:sg分。四种分值的大小关系为sq>sz1>sz2>sg。
本文根据任务划分及相关条件要求,将相关参数进行标识和说明。
Nq:接收的目标牵引识别任务集合;nq:执行的目标牵引识别任务集合;Tq:目标牵引识别任务完成时间门限;tq:执行的最长目标牵引识别任务完成时间。
Ng:接收的补盲跟踪任务集合;ng:执行的补盲跟踪任务集合;Tg:补盲跟踪任务完成时间门限;tg:执行的最长补盲跟踪任务完成时间。
Nz1:接收的重点区域监视任务集合;nz1:执行的重点区域监视任务集合;Tz1:重点区域任务周期执行时间门限;tz1:执行的重点区域任务周期。
Nz2:接收的普通区域监视任务集合;nz2:执行的普通区域监视任务集合;Tz2:普通区域任务周期执行时间门限;tz2:执行的普通区域任务周期。
Score:总分值;Tall:二次雷达工作总时间;Tidle:二次雷达的多任务调度空闲时间。
2.2 前提条件
本文提供的方法用于评价的是不同调度算法的优劣,因此必须保证不同算法应用时,除开算法以外的客观情况保持一致,从而需要满足以下约束条件:
(1)相同任务二次雷达执行的时间一致;
(2)调度算法执行时间有限,且总时长一致;
(3)周期执行任务在一个周期门限内相同任务最多计算一次分值,超出周期门限不计算分值;
(4)触发执行任务在完成时间门限内最多计算一次分值,超出时间门限不计算分值。
2.3 评级划分及条件
本文根据实际工程应用中项目需求是否得到满足,来将多任务波束调度算法分为4个等级,包括“丢失级”、“基本级”、“优化级”、“可拓展级”。
分级的5个约束条件:
(1)目标牵引识别任务集合完成调度且所有任务完成时间小于等于对应门限;
(2)重点区域监视任务集合完成调度且任务周期执行时间小于等于对应门限;
(3)普通区域监视任务集合完成调度且任务周期执行时间小于等于对应门限;
(4)补盲跟踪任务集合完成调度且所有任务完成时间小于等于对应门限;
(5)在满足条件(1)~(4)的基础上,空闲时间占总时间的比例大于等于30%。
“丢失级”:条件(1)~(3)存在一个或多个无法满足;
“基本级”:条件(1)~(3)均满足,条件(4)无法满足;
“优化级”:条件(1)~(4)均满足,条件(5)无法满足;
“可拓展级”:条件(1)~(5)均满足。
2.4 效率评价方法
(1)方法概述
多任务工作效率评价方法分两步进行比较:
①计算多任务调度算法的等级,比较不同调度算法的等级,“可拓展级”>“优化级”>“基本级”>“丢失级”;
②在等级相同的情况下,比较多任务调度总分值,总分值越高,工作效率越高。
(2)多任务算法等级判定
①步骤1计算如下:

若条件1~3存在一个或多个无法满足,则判断当前多任务调度效率等级为“丢失级”;若条件1~3均能满足,进入步骤2进行进一步判断。
②步骤2计算如下:

若条件4无法满足,则判断当前多任务调度效率等级为“基本级”;
若条件4能满足,进入步骤3进行进一步判断。
③步骤3计算如下:

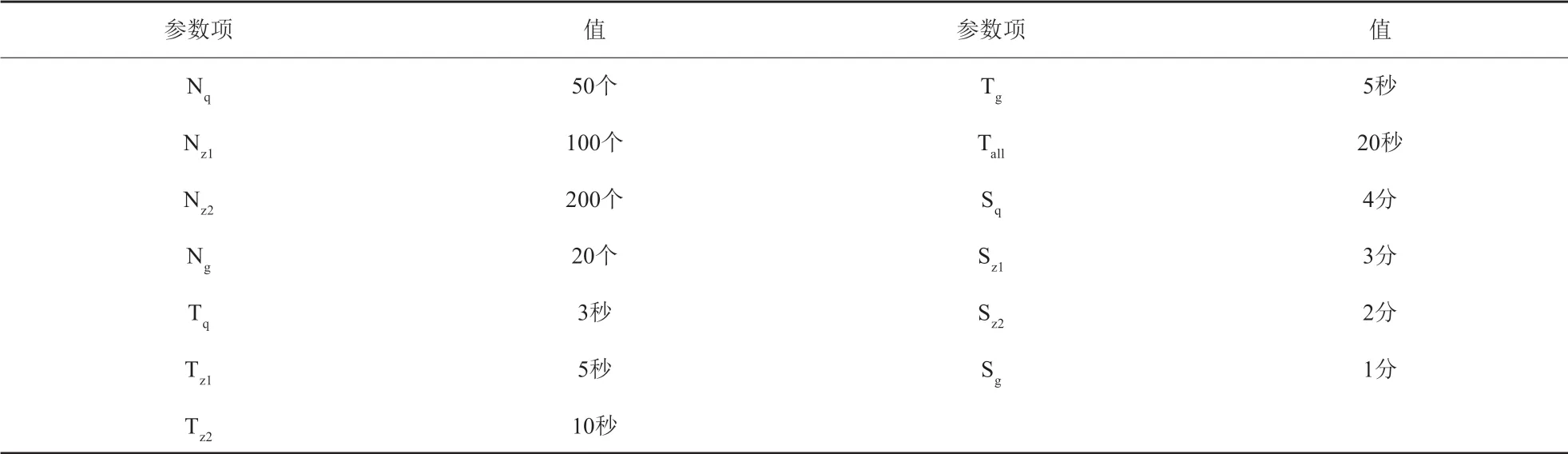
表1 测试环境变量说明

表2 测试数据和方法计算结果统计
若条件5无法满足,则判断当前多任务调度效率等级为“优化级”;
若条件5能满足,则判断当前多任务调度效率等级为“可拓展级”。
(3)多任务算法得分计算
本节根据“基本级”、“优化级”、“可拓展级”三个等级的得分整合进行得分计算,而“丢失级”等级无法满足基本需求,因此不讨论。
本节的得分计算方法的核心思想有两点,一是任务的完成情况,二是任务调度空闲时间。
任务完成情况根据实际执行的任务去进行得分计算,得分最多不能超过接收任务的总分值。例如两个多任务调度算法均为“基本级”级,第一个算法在规定时间内刚好完成了所有接收的目标牵引识别任务,其得分应为第二个算法在规定时间内将所有接收的目标牵引识别任务均完成了两次,其得分也应该为,而不是。
任务调度空闲时间的多少能够代表同等评级调度算法的效率高低。例如两个多任务调度算法均为“可拓展级”级,第一个算法完成所有任务调度后,空闲时间占总时间的50%,第二个算法空闲时间占总时间40%,则第一个算法得分应该更高,代表效率更高。
得分计算公式如下:

公式中Scoreg表示补盲跟踪任务得分,该得分需根据以下三种情况进行计算:

本节根据公式(1)和公式(2)能够将“基本级”、“优化级”、“可拓展级”三个等级的得分进行相应的计算,该得分仅应用在相同等级下进行比较。
3 方法应用
在某相控阵二次雷达平台进行多任务协同调度应用,由不同开发人员分别设计了三套算法来实现用户需求,根据用户提出的最大需求,在模拟环境中测试验证。模拟测试环境的参数,见表1。
基于表1的测试环境,将算法A、B、C进行测试验证,得到相关测试数据,并根据效率评价方法计算其等级和得分,见表2。
根据表2的计算结果,可以得到算法A和算法B均达到优化级,算法C达到基本级,算法A和B均优于算法C。再根据算法A得分高于算法B,得到算法A优于算法B。
通过模拟用户的最大需求对某相控阵二次雷达平台的三种任务调度算法进行测试采样,然后应用本文提出的评价方法对测试的数据进行计算,得到三种算法的等级和得分,从而能够让我们对于算法的优劣有一个很清晰的评价。
结语:本文主要针对相控阵二次雷达多任务协同调度的广泛应用,提出一种效率评价方法,名为两层评价法,第一层评价主要基于用户最大需求的满足程度来进行分级,第二层评价应用于同级算法进行得分比较。通过该方法的工程应用,可以规范和优化我们的多任务协同调度算法。
