微波光子雷达逆合成孔径成像
2021-06-03
(中国科学院空天信息创新研究院微波成像技术国家重点实验室, 北京 100190)
0 引言
逆合成孔径雷达(ISAR)成像技术作为一种全天时、全天候、远距离、高分辨的目标信息获取手段,在空天目标识别与监测、航天测绘、战略预警等领域有着不可或缺的重要作用。随着科技发展和应用推动,对成像分辨率的需求不断提高,成像雷达向高频宽带方向持续发展。然而,由于电子技术受限于“带宽瓶颈”,传统成像雷达的分辨率提升面临巨大挑战[1]。近年来,微波光子技术凭借光子大带宽、低传输损耗、抗电磁干扰等特性,为克服上述挑战提供了可能的解决方案,被认为是“照亮雷达未来的关键技术”[2]。微波光子雷达成为国内外研究热点。
2014年3月,《Nature》杂志报导了国际首部微波光子雷达,实现对5.5 km外运动目标的二维成像,距离分辨率150 m[3]。2016年,相关团队将原有系统扩展至双波段,并实现了对空中及海上非合作目标的ISAR二维成像[4]。国内多家单位也开展了微波光子雷达成像技术研究,融合ISAR成像技术与微波光子技术,通过光域雷达信号产生、传输与分发、控制与处理等,提高雷达带宽、增大孔径或基线长度,实现高分辨率二维成像[5-10]。2017年6月,中国科学院电子学研究所(现中国科学院空天信息创新研究院)研制成功我国首部微波光子雷达样机,并获得首幅外场非合作目标(民航客机)的ISAR二维成像图样;南京航空航天大学联合中国电子科技集团第 十四研究所研制了动态范围达55 dB的微波光子成像雷达样机,也完成了外场非合作目标ISAR二维成像;武汉某研究单位报道了超宽带高分辨微波光子雷达样机,瞬时带宽大于10 GHz,实现了对民航客机的ISAR二维成像,距离分辨率优于2 cm;中国电子科技集团第三十八研究所研制了微波光子相控阵雷达试验系统,完成了室内目标的ISAR二维成像;清华大学报道了W波段宽带微波光子雷达,瞬时带宽8 GHz,并在实验室内实现了合作目标的ISAR二维成像,二维分辨率均优于2 cm。以上研究结果已充分验证了微波光子技术应用于高频宽带雷达并提升成像分辨率的可行性。
为获取目标的更多细节信息,在垂直于ISAR二维成像平面的方向上构建干涉基线或合成孔径,对具有一定视角差异的多幅ISAR复图像进行干涉处理,可重建目标三维散射特征,实现三维成像。典型方法有干涉ISAR(InISAR)、阵列ISAR等[11-12]。微波光子技术在射频信号传输方面具有宽带、低损耗等优势,可用于阵列雷达信号分发与相参合成,从而向三维成像应用扩展[13-15]。2018年,清华大学报道了X波段微波光子InISAR试验系统,实现对运动目标的动态三维重建[16]。然而,InISAR对复杂地形如叠掩、阴影等的三维重建难度大;且为保证信号干涉质量需限制基线长度,从而影响了测量精度[17]。为克服上述问题,中国科学院空天信息创新研究院在ISAR成像的研究基础上,结合光载射频传输技术构建了微波光子分布式阵列雷达试验系统,实现了转台动目标的高精度三维成像。
本文第一和第二章节将详细介绍中国科学院空天信息创新研究院在微波光子ISAR二维成像和阵列ISAR三维成像方面的工作;第三章节进行总结。
1 微波光子雷达ISAR二维成像
1.1 系统原理
图1(a)为用于ISAR二维成像的微波光子雷达系统原理图。该系统由发射单元和接收单元组成。发射单元的信号发生器产生的低频窄带信号经微波光子倍频后得到雷达信号,经天线发射;复制的雷达信号作为参考信号,在接收单元和天线接收的回波信号进行光子混频,实现光域去斜处理,输出的窄带去斜信号经采样后进行数字处理,得到目标的二维图像。
1)基于光子倍频的宽带雷达信号产生
在发射单元,由信号发生器产生的低频窄带线性调频信号通过马赫-曾德尔调制器(MZM)调制到光载波上,控制MZM工作在最小偏置点以实现载波及偶数阶边带抑制,再经光电探测器(PD)转换为电信号,通过电滤波器滤除高频信号,即可获得线性调频信号的二倍频信号。该信号被分为两路,一路作为雷达信号经放大后由天线发射,另一路作为参考信号,输入至接收单元。
2)基于平行架构光子去斜处理的回波信号接收
在接收单元,天线接收的回波信号经放大后与参考信号同时输入至双偏振双平行马赫-曾德尔调制器(DP-DPMZM,如图1(b)所示),分别调制到另一光载波的正交偏振态上,并使DP-DPMZM中的两个平行MZM调制器均偏置在最小偏置点以抑制载波,得到的偏振复用调制光信号经光滤波器选取载波某一侧的一阶边带并放大后,输入至偏振复用相干光接收机(如图1(c)所示),将两个偏振方向上的调制光信号之间进行相干平衡探测,实现回波信号与参考信号的光子混频,获得窄带去斜信号,再经模数转换后进行二维成像处理。借助光偏振复用技术构建平行架构,回波信号和参考信号调制在同一载波上经相同路径传输后进行混频,保证了信号间的相干性;此外,通过光电平衡探测抑制了系统共模噪声,有助于提高系统的动态范围。

图1 微波光子雷达系统原理图
1.2 实验结果及讨论
根据系统原理搭建微波光子雷达,发射单元通过光子倍频产生Ku波段线性调频雷达信号,中心频率为14.6 GHz,瞬时带宽为600 MHz(对应的理论距离分辨率为0.25 m),周期为500 μs,信噪比为41 dBc;接收单元对回波信号去斜处理后,进行采样和二维ISAR成像处理,受限于相干接收机的噪声水平,测量的接收单元的无杂散动态范围为40 dBc。为测试系统的成像性能,对实验室内的合作目标及外场非合作目标开展了一系列ISAR成像试验。
首先,在暗室对一对角反射器(TCR)进行二维ISAR成像。使TCR保持静止,距离向和方位向间距分别为0.45 m和0.4 m,通过对回波信号进行去斜处理和傅里叶变换获得目标的距离向特征,如图2(a)所示。从图中可以看出,两个峰值分别对应两个TCR,其频率间隔为3.25 kHz,对应距离为0.4 m,与实际距离吻合。再将TCR置于一维转台,以10°/s的角速度匀速转动,距离向和方位向间距分别为0.2 m和0.45 m,对1 s积分时间内的回波信号进行成像处理,得到的结果如图2(b)所示。可以看出,两个TCR的距离向和方位向间距分别为 0.18 m和0.43 cm,与实际距离吻合。
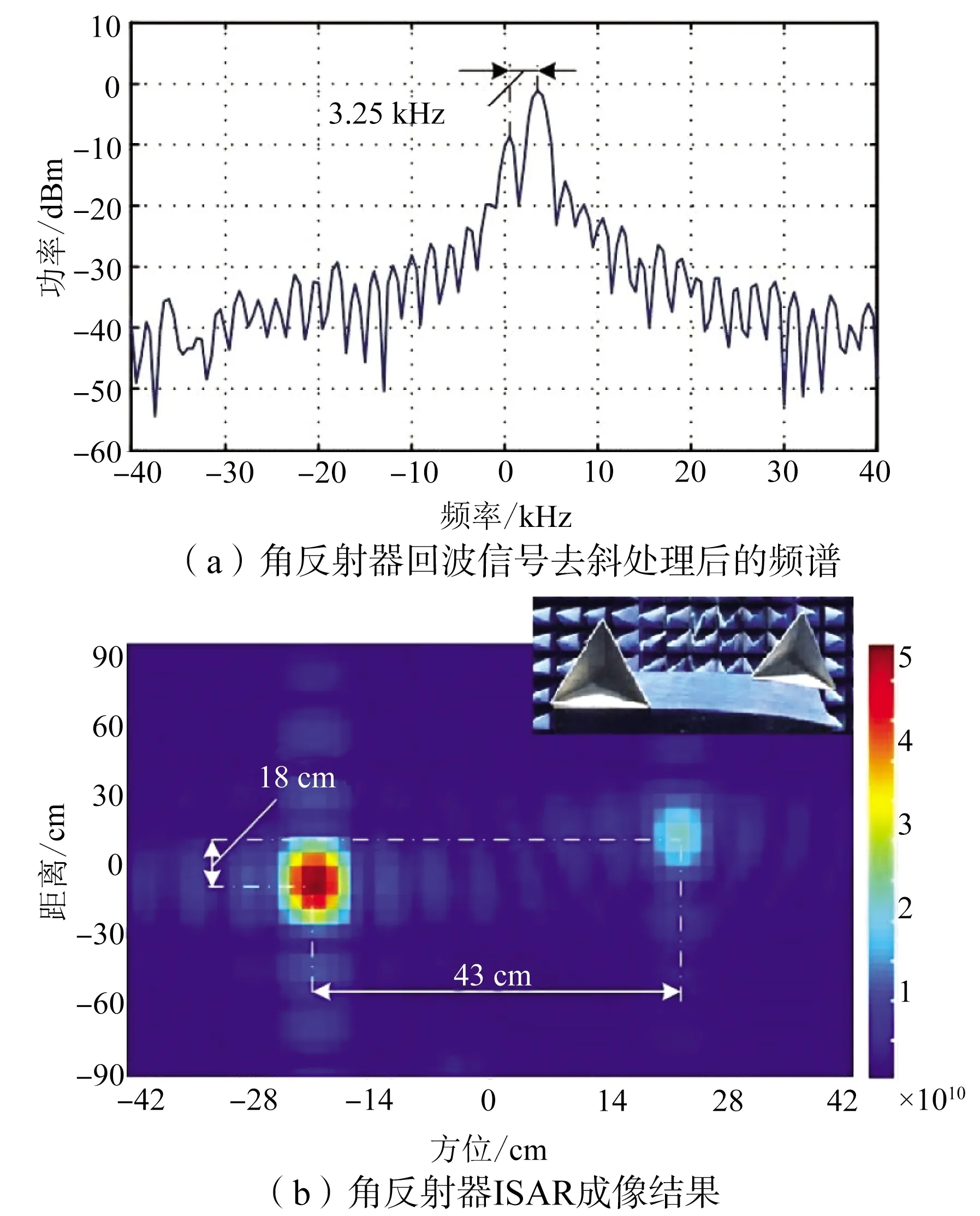
图2 暗室角反射器成像试验结果
然后,在外场对民航波音737客机进行二维ISAR成像。对1.18 s积分时间内的回波信号进行二维成像处理(应对多普勒频率分辨率为0.85 Hz),得到的结果如图3所示。图中飞机的外形轮廓清晰可见,位于飞机腹部的两个引擎、机翼、机身等细节也易于分辨。

图3 外场民航波音737客机的二维ISAR成像结果
上述试验结果有力地证明了微波光子雷达的二维成像能力,并显示出应用微波光子技术提升雷达性能的潜力。
2 微波光子雷达阵列ISAR三维成像
2.1 系统原理
阵列ISAR三维成像是基于多站分布式雷达架构的一种成像方式,结合了基于空间天线阵列的实孔径成像和基于目标相对天线运动的合成孔径成像。相比于仅有两个收发通道的InISAR,增加了天线数量和基线长度,从而具备第三维度的几何分辨能力,通道间的相参性也得到提高。但是,增加的收发单元也将成倍提高系统成本和复杂度,基线增长也为信号相干处理带来了新的挑战。
目前,多站雷达多采用电缆传输参考信号进行时间同步,接收机收到回波信号后先在本地进行预处理,再传回中心站进行数据融合,因而难以避免部分信息丢失[17]。相比于电缆传输,光射频传输在带宽、损耗、抗电磁干扰等方面具备一定优势,可直接传输雷达信号而非时钟信号;波分复用技术可用于多路回波信号的并行光子去斜处理,将各通道回波信号调制在不同波长的光载波上,合束后可一同进行光电转换完成去斜处理,简化了系统结构。基于此,在上述微波光子雷达基础上构建了基于光纤分布式天线阵列的微波光子雷达系统,如图4(a)所示。该系统包括中心站(CO)、发射站(Tx)和N个具有相同结构的接收站(Rx)。发射站、接收站与中心站之间分别由不同光纤连接以用于雷达发射信号、参考信号和回波信号的传输。
1)基于光子倍频和波分复用的宽带雷达信号产生、复制与分发
在中心站,延用上述光子倍频方法和波分复用技术,将窄带线性调频信号同时调制到多路不同波长的光载波上,实现信号的光域复制,再分别作为发射光信号和参考光信号经光纤分发至发射站和接收站,并在发射站完成光电转换,得到倍频后的线性调频雷达信号,经天线发射。
2)基于并行光子去斜处理的多通道回波信号接收
由于参考信号与回波信号分别在中心站和远程接收站产生,不再采用上述基于平行调制架构的光子去斜方法,改用串行调制架构。在各接收站,天线同时接收回波信号,并分别经MZM调制到来自中心站的参考光信号上,使MZM工作在正交偏置点,输出信号的光谱如图4(a)所示,其中fci是波长为λi的光载波对应的频率,fIF是信号发生器产生用于光子倍频的窄带信号的中心频率。通过光滤波器选取其中的E1、E2、E3、E4分量传回中心站,并在中心站合束后经PD完成并行光子去斜处理,输出信号表示为
(1)
式中:SRi(t)为各通道回波信号去斜处理后的结果;VRi为对应的幅值;τi=τTi+τRi,τTi和τRi分别为中心站到第i个接收站的光纤传输延时;Δτi=τTi-τ0-τecho_i,τecho_i为雷达信号由发射天线经目标返回接收天线经历的延时,τ0为中心站到发射站的光纤传输延时,且满足τTi≥τ0+τecho_i;ωRF,kRF,Tp分别为雷达信号的角频率、调频率和周期。从式(1)可以看出,各通道回波信号经去斜处理后的频率为kRFΔτi,与延时τTi成正相关,与延时τecho_i成负相关。在远场成像条件下,目标到天线阵列的距离远大于阵列间距,各通道对应的τecho_i相近。因此,为使各通道回波的去斜信号在频谱上可以区分,以便分离各通道回波数据分别进行二维ISAR成像,光参考信号由中心站传输至各接收站需经历不同的光延时,即满足当i≠j时,τTi≠τTj。各通道回波信号去斜处理前后的时频分布如图4(b)所示。此外,还需根据成像场景的幅宽调整延时τTi之间的差值以避免各通道去斜信号的频谱重叠。

图4 微波光子雷达阵列系统原理图
3)传输延时补偿与阵列ISAR三维成像
对探测器输出的去斜信号进行采样后作傅里叶变换,并对回波包络延时引起的附加相位和剩余视频相位进行补偿,得到一维距离向脉冲压缩的结果,表示为

exp{j(2πfRFΔτi+Δφi)}}
(2)
可以看出,各接收站收到的回波信号被压缩至不同频率(即kRFΔτi)处,从而可根据各通道对应的不同频率范围分割距离向脉冲压缩信号。此外,式中Δφi=-2πkRFΔτiτi-2πfτi是由光纤传输引入的附加相位,在后续成像处理时将引入方位向位置误差并恶化通道间的相干性,需在方位向脉冲压缩前进行补偿。由于目标被压缩至f=kRFΔτi处的一个窄脉冲,只需对该处的相位进行补偿,附加相位可重写为Δφi=-4πfτi,根据不同频率范围对应的接收站与中心站间的传输延 时,将式(2)乘以函数Sci(f)=exp(-jΔφi)=exp(j4πfτi),即可消去附加相位,再进行信号分割和方位向脉冲压缩,可得N幅二维ISAR复图像,表示为
Ii(f,fm)=

(3)
式中,Rref_i=cτref_i/2=c(τTi-τ0)/2,RT和RRi分别为目标到发射天线和第i个接收天线的距离,VT和VRi分别为目标相对于发射天线和第i个接收天线的速度,fm为多普勒频率,λ为雷达发射信号中心频率对应的波长;前两个sinc函数即代表目标的距离和多普勒信息。在远场成像条件下,当发射天线与接收天线构成的等效相位中心在垂直于二维ISAR成像平面的方向上形成均匀线性阵列,可以通过对上述复图像的配准处理,并以某一主散射点作为参考标定并修正通道间的幅相一致性,再通过第三维度傅里叶变换即可实现目标的三维重建。
2.2 实验结果及讨论
为验证上述原理的可行性,搭建一发双收微波光子雷达系统,在目标沿同一运动轨迹重复运动的同时,一对接收天线在不同位置接收回波进行并行ISAR二维成像,等效构建了一发多收微波光子雷达系统。工作在Ku波段,中心频率为15 GHz,瞬时带宽为2 GHz,周期为200 μs。由于在实验室环境下,目标相距天线阵列不远,在不影响原理验证的情况下,将参考光信号从中心站传输至两个接收站的光纤分别设置为150 m和400 m,其他用于连接各站点的光纤仅几米长。
在实验室内对3个TCR进行三维成像。阵列天线及TCR的相对位置如图5所示。TCR置于木架上的不同位置,再置于一维转台上。

图5 天线阵列和角反射器的相对位置(Tx:发射站;Rx:接收站;APC:等效相位中心;TCR:角反射器)
静止时,一对天线同时接收回波,经并行去斜处理后的信号频谱如图6(a)所示,在7.45 MHz和 20.15 MHz附近可见两个目标窗口,每个窗口均包含3个主峰,分别对应3个TCR。当目标随木架沿Z轴方向以15.6°/s转速重复转动时,一对接收天线在图示的不同位置对同一运动轨迹下的目标进行多次双通道ISAR二维成像,积分时间为0.6 s,由此在Z轴方向形成由16个等效相位中心(APC)组成的均匀线性阵列,如图中所示,总长为0.6 m。为保证接收天线在不同位置接收目标的运动轨迹的一致性,采用一副光电开关,将光源置于木架随目标一同转动,探测器置于转台旁边固定不动。当目标转动到某一位置,探测器检测到光信号产生电脉冲,触发数据记录。单次成像获得的两幅二维复图像如图6(b)所示,3个TCR的三维重建结果及其在3个平面的投影如图7所示,距离向、方位向和高度向分别对应Y轴、X轴和Z轴方向。为分析目标的相对位置和成像分辨率,对3个TCR的成像结果进行三维切片分析,如图8所示,可得三维分辨率为7.3 cm(距离向)×5.6 cm(方位向)×13.3 cm(高度向,对应0.85°角分辨率),与理论值(6.6 cm×5.4 cm×0.85°)吻合。计算得到3个TCR的相对位置与真实位置吻合,如表1所示。
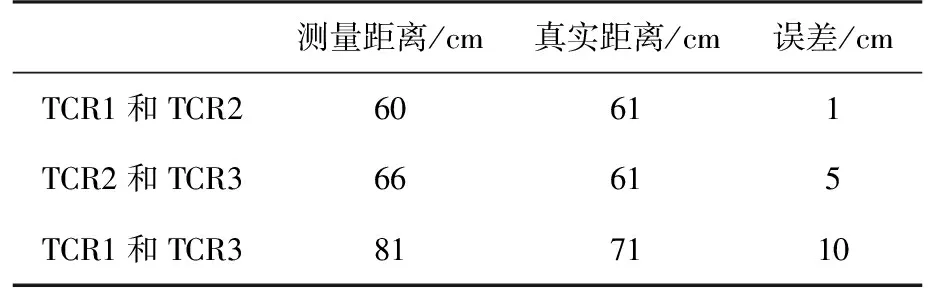
表1 角反射器相对位置的测量值与真实值对比

图6 角反射器ISAR二维成像结果

图7 角反射器的三维成像结果

图8 角反射器三维成像结果的距离向、方位向和高度向切片
本方案借助并融合光子辅助宽带信号产生、并行光子去斜处理和光射频传输技术,构建分布式阵列微波光子雷达系统,完成对运动TCR的精确三维重建,为大规模分布式阵列雷达实现提供了有效的解决方案。试验结果进一步展示了微波光子技术在雷达成像中的应用潜力。
3 结束语
本文介绍的微波光子雷达成像系统,将微波光子技术与雷达ISAR成像技术融合,实现了对运动目标的二维及三维成像,分辨率在厘米量级。初步探索并验证了微波光子技术应用于雷达成像领域的可行性和提升系统关键性能的潜力。随着雷达技术的不断发展,在高频宽带、智能化可重构、多功能一体化、小型化轻量化等多方面需求的推动下,微波光子技术有待与现代雷达技术的更深层次融合,全面提升系统指标、转换能效、动态范围、可靠性,推进微波光子技术的广泛应用和雷达装备的进一步发展。
