微波光子成像雷达技术发展综述
2021-06-03
(空军预警学院,湖北武汉 430019)
0 引言
微波成像雷达(合成孔径或逆合成孔径)是一种可提供目标二维或三维信息且能够实现远程探测的工具,相比于光学手段,具有全天时、全天候特点,在预警、监视以及遥感等领域发挥着重要和独特作用[1]。随着隐身、微小无人以及集群目标等新型作战平台逐渐走向成熟,将极大地改变了现代战争作战模式,通过获取目标形状、形态以及运动行为等信息实现目标精确识别(辨识)的预警情报需求对微波成像雷达提出了更高的要求。依据雷达理论,雷达分辨的增大依赖于发射信号带宽的增大,而隐身目标电磁散射的增强需提高雷达发射信号载频的调谐范围[2-3],因此,有效增大带宽和载频的调谐范围成为成像雷达发展的重要方向。微波电子技术是现有微波成像雷达的主流实现手段,但由于信号载体为电子原因,系统往往难以实现数GHz或更大带宽信号的产生与接收处理[4-5],且中心频率可调谐性、高频远距离传输、多频段兼容性和抗干扰能力方面也存在不足[6],使得电子技术无法有效满足微波成像雷达发展的新需要。
微波光子技术作为微波电子技术和光学技术相结合的新兴交叉领域,具备高频低相噪、超宽带、低损耗及高可调谐能力等优势[7-8]。通过发挥电的精细、灵活以及光的宽带与低损耗传输的优势使微波光子雷达能够提供更高的信号频率,更快的采样和处理速度,更宽的信号及传输带宽,更低的基准源噪声和传输损耗,有效突破了单纯电子系统的各种技术“瓶颈”,结合其还具有功耗低、重量轻、尺寸小、抗电磁干扰等诸多优势,为解决微波成像雷达困境提供了一条有效路径。2014年,意大利电信联盟大学研究小组首次报道了一种全光架构雷达[9],2016年研制了S、X双频段微波光子成像雷达,该系统基于一套架构实现,双波段可同时工作,展示了微波光子技术在频段兼容上的优势[10]。2017年,国内清华大学在实验室完成了基于X波段带宽达4 GHz系统的目标成像实验[11],同期中科院电子所、南京航空航天大学、空军预警学院等分别基于不同光倍频技术实现了带宽达600 MHz、8 GHz和10.02 GHz雷达发射波形,完成了多种类型目标高精细分辨成像验证,展示了微波光子成像雷达在提高系统带宽方面的能力[12-17]。随后,超高分辨率微波光子宽带成像雷达[18]、微波光子分布式雷达[19]、高分辨相控阵列成像雷达[20]等快速涌现,进一步展示了超越电子学技术的优异性能,极大地推动了微波光子成像雷达技术的发展。为此,本文主要对现有典型的微波光子成像雷达系统架构和原理进行了研究分析,给出了主要应用方向和实验结果,并提出了其仍需解决的问题。
1 微波光子成像雷达系统主要架构
目前,已报道的典型微波光子成像雷达系统及技术特点如表1所示,依据波形产生和接收实现方式的不同,主要分为三类:基于光频梳的上变频和光采样架构、基于光数模转换和去斜接收架构及基于光倍频和光去斜接收架构。

表1 已有典型微波光子成像雷达系统
1.1 基于光频梳的上变频和光采样架构
该类系统架构为意大利小组所提出[10],系统组成如图1所示,利用锁模激光器输出的光频梳构建光上变频模块和光直接采样接收模块。

图1 基于光上变频和光直接采样技术的微波光子多频段成像雷达系统组成
在发射链路,锁模激光器输出频率间隔为fr的光频梳至马赫-曾德尔调制器(Mach-Zehnder Modulator,MZM),因两不同频率参数的中频信号(中心频率和带宽分别为f1,B1和f2,B2)输入MZM对光频梳进行强度调制,调制的结果是在光频梳中每个光频率两侧出现一系列间隔等于上述中频信号中心频率的光边带,这使得将调制后的光信号送至光电探测器拍频,利用电滤波器从拍频得到的电信号中理论上可滤得中心频率等于nfr±f1或nfr±f2(n为正整数)、带宽相应为B1或B2的发射信号,进而采用多个滤波器可同时得到多个载频的发射信号。文献[10]中,利用该光上变频方法,基于中频在59 MHz和125 MHz的电中频信号同时产生了S和X频段、带宽均为18 MHz的线性调频波形。
在接收链路,天线接收到的回波信号经由相应频段电滤波器和放大器滤波放大,再通过发射支路耦合出的部分光频梳信号形成光采样脉冲,并对回波信号采样。更进一步,采样光信号送至光电探测器拍频,再经电模数转换器(Analog to Digital Converter, ADC)量化为数字信号,用于现场可编程门阵列(Field Programmable Gate Array, FPGA)和数字信号处理器(Digital Signal Processor, DSP)进一步数据分频段处理和成像处理。此接收链路ADC过程为“光采样电量化”,其采样率等于fr,文献[10]利用该方法实现了400 MS/s采样率、12 bit有效位数的光模数转换过程。
该类系统充分发挥了锁模激光器输出光脉冲高稳定特性,理论上可产生载频上百GHz的微波信号,但由于所采用激光器锁模机制为被动模式,带宽受限于其较低的重频,必须采用窄带电滤波器进行选频,这不仅让所产生的雷达波形频率调谐范围小,还限制了信号的带宽,其距离分辨率仅达到米量级。
1.2 基于光数模转换和光电混频接收架构
基于光数模转换和光电混合混频去斜接收的系统由清华大学相关小组提出[11,19,21],该类系统架构和主要功能模块组成如图2所示。

(a)典型系统架构
在发射支路,如图2(a),利用高重频光频梳源产生一组频梳间隔较大的光频梳,通过可编程光滤波器依据所需上变频量选出两根相应间隔的光频梳。随后,光数模转换系统产生的宽带基带波形经过MZM调制到双光频梳上,其产生的光信号再由光电探测器拍频,经电滤波器滤波即可得到高频宽带发射信号。其中,高重频光频梳源的组成如图2(b)所示,激光器产生单频光载波至MZM进行幅度调制,之后再由相位调制器(Phase Modulator,PM)进行相位调制。由于调制的射频信号源来自同一电振荡器,因此,通过对所加射频信号幅度和相位的控制及MZM偏置状态的控制,即可实现平坦度较佳的光频梳产生。另一方面,光数模转换组成如图2(c)所示,N个不同波长激光器和N个双驱MZM(Dual-drive MZM,DMZM)两两对应组成N个信道,对应光数模转换有效位数将为N比特,且控制激光器输出光功率的相对比值依次为1,2,4,8…2N-1,所产生波形的幅度值可通过控制每个DMZM上两个驱动信号0或1编码实现。该方案借助每个DMZM上两个驱动信号的时域控制(两信号间有半个码长的延时)及调制系数的控制,可实现编码率2倍的采样率。文献[21]基于14.5 GHz的振荡信号及2比特的光数模转换系统,实现了中心频率在94 GHz、带宽为8 GHz、时宽为10 μs脉冲信号的产生。
在接收支路,高重频光频梳源中电振荡信号首先经电倍频器倍频到发射信号中心频率处,再与放大后的回波信号在电混频器处混频,实现对回波信号的下变频。更进一步,光模数转换源产生的部分基带宽带信号送至双平行马赫-曾德尔调制器(Dual-Parallel MZM,DPMZM),DPMZM另一臂输入信号为下变频后的回波信号,两者在DPMZM处发生光混频,混频输出经光电探测器拍频,再通过ADC对光电转换后的中频信号完成模数转换,最终提供给DSP进行目标成像。
该类系统可突破第一类系统中锁模激光器重复频率的限制,为光数模转换模块产生的基带信号上变频提供更高的频率空间。同时,该方案中光数模转换提供了一种可产生高质量大带宽大时宽信号的新方法,可实现中心频率和带宽的独立调谐。但较之前一种架构,系统总体上相对复杂,高有效比特位光数模转换过程需要多路激光器和DMZM组合,多路间的误差校正及多次光电转换也不利于信号信噪比的提升。
1.3 基于光倍频和光去斜接收架构
基于光倍频和光去斜接收的系统架构主要为空军预警学院、南京航空航天大学以及中科院电子所所采用[12-14,20],一种可实现六倍频的系统组成如图3所示。

图3 基于光六倍频和光去斜接收的微波光子成像雷达系统架构

在接收端,利用光本振信号对回波的去斜接收,光倍频信号作为接收本振信号送至接收支路MZM,对其输入的放大的宽带回波信号进行调制。当控制偏置电压使MZM工作于正交状态,因回波信号中心频率等于光本振信号中±3阶边带频率之差,使得±3阶边带各自作为光载波所调制出的1阶边带位置会与另一3阶边带位置重合,因此将该信号送至光电探测器拍频,即可实现宽带回波信号的光去斜接收。同时,为了解决去斜接收中ADC工作频段和目标探测距离之间的矛盾,可采用光延时模块对宽带光本振进行延时,从而可实现更远目标的有效探测。此外,可进一步采用光平衡探测技术[12]和光IQ接收技术[22]改善混频中噪声性能和杂散水平。
该类系统充分运用光在处理宽带或超宽带信号时优异的幅频一致性,实现了超宽带信号高质量产生和接收,同时发挥出光传输低损耗、宽带的优势,可对光本振信号进行不同延时,实现对不同距离目标的高精度成像。但该类系统信号源仍基于电子技术产生,信号的相位噪声经多次倍频后下降明显。
2 微波光子雷达成像技术及典型应用
雷达二维成像主要通过回波的距离和方位压缩处理实现,当系统实现的带宽较窄时,已有的电子学雷达成像技术可用于微波光子雷达成像,但当微波光子成像雷达带宽达到GHz、载频超越X波段后,其回波中目标转动分量会导致回波包络存在空变的距离弯曲项,方位维相位出现空变的2次相位误差,会导致成像结果散焦。针对这一难题,文献[15]提出了一种包络和相位校正高精度补偿的成像算法,其以回波包络相关值为目标函数值,利用迭代估计目标转速,进而在距离向通过重采样对齐包络,而在方位向则构造空变的方位补偿函数校正转动相位。另一方面,微波光子雷达宽调谐特点,能同时获得目标多个频段回波数据,可实现目标的多频段融合成像,其多频段数据融合成像目前主要有两种方法:一是图像域融合方法[10],二是利用频谱填充处理技术通过多个频段子带数据填充的高分辨成像方法[23]。
相比于传统电子体制雷达,微波光子成像雷达在带宽上有显著优势,可获得高分辨图像,从而可获得更加精细的目标结构信息。同时,光混频去斜接收使得系统最后需采集的信号为中频信号,相对应的模数转换采样率显著降低,光本振延时的采用可进一步降低采样数据量,可实现目标信息的快速获取,进而提取目标实时运动信息。
2.1 目标精细结构分辨及结构信息量化提取
对空天运动目标精细结构的提取有助于识别目标的种类。图4给出了利用微波光子超宽带成像雷达对典型空天飞行目标的ISAR成像结果[14]。图4(a)为对1.2 km外民航客机的成像结果,从图中可看出整个飞机轮廓清晰,襟翼导轨和引擎等结构可清晰辨识。图4(b)为对一150 m外无人机成像结果,从图中可以辨识出机臂(宽度为1.9 cm)、机腿(白色虚线框所示,宽度为1.8 cm)、电池及旋翼等结构。除此之外,由于图像的高分辨特征,可以从图4(a)中准确辨识出单翼上襟翼导轨数量为3,图4(b)中旋翼的数量为6。对目标结构特征的准确识别及对结构信息的量化提取具有显著军事和民用价值。

(a)民航客机成像结果
除了ISAR,SAR是微波成像的另一种重要方式。图5为将相同雷达系统架设在汽车平台对杭州雷峰塔(图5(a))的SAR成像结果[14]。从图5(b)可看到塔体规则的多边形结构清晰,塔体和塔刹结构可清晰辨别,塔体五层结构可定量确定(白线标识出层与层之间间隔),塔体每层廊顶三角结构也可明显辨别。图5(c)给出了图5(b)中塔刹部分(红色虚线矩形框)成像结果放大展示,图5(d)给出了塔刹实物参照。从图5(c)可看到与图5(d)中对应的两条链条结构(红色箭头所示)。此外,在中轴两侧对称分布一对对强散射点,与实物对比,可看到其对应于实物中多层金属盘状结构(相轮),从图5(c)中可数出共有7层结构,与实际数目相符。图5(e)为塔体一边廊顶三角结构成像结果,无论性调还是和数目均与实物图5(f)很好对应。对塔刹金属链条的成像表明了微波光子成像雷达的分辨能力和动态范围,对塔体层状结构和塔刹金属盘的准确区分表明微波光子成像雷达在遥感应用中的潜在价值。
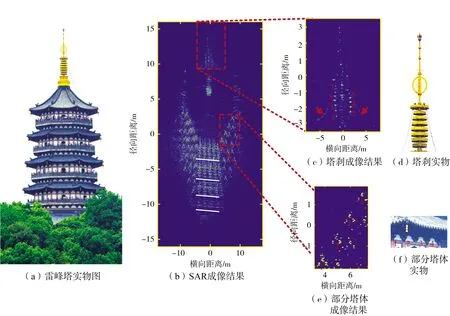
图5 雷峰塔实物及SAR成像结果
2.2 目标运动行为监控和量化特征提取
目标运动行为的及时监控有助于掌握目标状态和意图,图6(a)为南京航空航天大学利用所构建的微波光子成像雷达对一转动的小风扇进行实时成像结果[13],对应成像速率为100 帧/秒,每帧图(图6(b)~(d))中均可辨识出相应的5个叶片,这充分展示了微波光子成像雷达对小目标运动行为的高速获取能力。
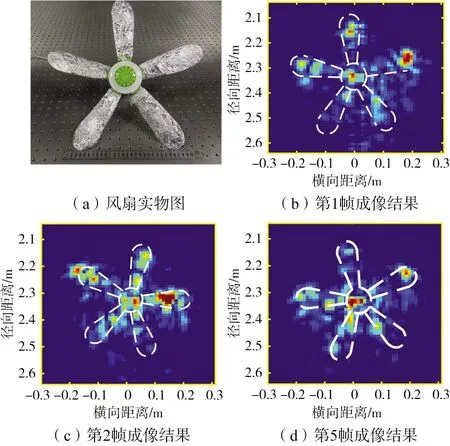
图6 转动小风扇ISAR实时成像结果
对于空中目标运动行为监测,图7给出了大飞机和无人机相应的实验结果[24]。图7(a)给出了对起飞过程中的民航客机连续等间隔时间段内成像结果,图中可以看到飞机飞行姿态不断在调整。从图7(b)所给出的无人机的连续成像结果也可看出无人机的轻微旋转。更进一步,图7(c)和(d)给出的对上述图像中飞机、无人机飞行过程中转动角度的定量提取结果。结果显示以上角度变化行为量化提取结果符合在飞机起飞过程中行为的不均匀变化以及人控无人机的匀速转动等实际情况,展示了微波光子成像雷达用于空天目标行为监控的有效性。

图7 波音737客机和无人机视频成像结果
此外,目标局部的振动参数也可通过成像结果提取出来。文献[17]通过粗成像将机身和机翼回波分离,然后通过机身成像和定标结果估计出雷达视线角,并借助对机翼进行子孔径序列成像提取出散射点的距离及多普勒变化曲线,最终可提取出民航客机在起飞过程中,机翼的振动频率为2.48 Hz,振动角为0.07°。
3 微波光子成像雷达仍需解决的问题
微波光子雷达是一种新技术雷达,交叉融合了雷达技术、微波与电磁场、光子学等多个学科,较之传统电子学雷达能够实现更大的带宽、更高的频段和更优的波形控制,为成像雷达的发展提供了有效的技术途径,使得获取目标精确信息成为可能。尽管微波光子成像雷达的研究已取得了较大进展,但仍存在重要问题需进一步深入研究。
3.1 关键光电器件研制及指标性能提升
微波光子成像雷达发射信号产生、信号接收以及传输等性能依赖于光电调制器、可调光滤波器、锁模激光器等关键光电器件的性能指标。目前,微波光子射频链路损耗较大,其主要制约因素是电光调制器的性能受限,其半波电压过高,导致信号处理、系统级联等操作均会引入较大的噪声。同时,由于光频和射频具有4到5个数量级的差别,光载射频信号的相对带宽均极窄,对其进行精细(百MHz以下)操作非常困难,需研制集成、高精度的光频谱处理器件。此外,所产生波形相位噪声、幅频起伏等指标有待进一步提高,迫切需要高质量光生任意波形技术。我们认为提升微波光子成像雷达系统性能,仍需加强表2所示的关键光、电器件性能的进一步研究。

表2 关键器件及性能指标提升建议
3.2 微波光子雷达系统集成及应用研究
相比电子学射频链路的集成化发展,微波光子射频链路目前多采用分离的光器件、电光混合器件等,链路稳定性和级联性能均受限,远未达到光子学理论性能。微波光子雷达提供的宽调谐、大带宽特性使得在同一系统中实现多频段、多功能雷达,甚至雷达、电子侦察、通信等多种系统成为可能[19-20],为未来综合信息感知带来变革性手段,当前的系统应用研究还远未深入,仍需进一步深入研究。
4 结束语
微波光子技术为成像雷达系统的进一步发展提供了有效技术途径,本文总结了微波光子成像雷达及相关技术研究现状,对系统架构进行了研究分析,给出了主要应用方向,并提出了进一步发展仍需解决的问题。相比传统电子学成像雷达,微波光子成像雷达具备良好的大带宽、宽调谐特点,已展现出提高雷达成像精度获取目标精细情报信息的能力。未来,随着光电器件实现技术和集成工艺的发展,微波光子成像雷达的发展趋势将有两个层面:一是基于器件性能的提升,在波形质量、接收机动态范围等方面进行改善,从而追求系统指标的全面先进性;二是充分发挥微波光子技术低损耗传输、多频段兼容等技术优势,使雷达系统朝分布式、多功能一体化等方向发展,从而变革现有微波成像雷达系统性能,为信息感知提供先进手段。
