倾转旋翼无人机动力学建模与控制系统设计
2021-05-29刘建龙窦银科左广宇
刘建龙,窦银科,左广宇
(太原理工大学 电气与动力工程学院,山西 太原 030024)
0 引言
近年来无人机技术水平不断发展,为提高无人机性能,垂直起降无人机逐渐成为无人机研究领域内的热点问题之一。作为垂直起降无人机的一种方案,倾转旋翼无人机受到广泛的关注。倾转旋翼无人机是在四旋翼无人机的基础上,将飞行方向的前两个旋翼增加倾转舵机实现由垂直方向向水平方向上的倾转。美国波音公司和贝尔直升机公司(Boeing Bell)联合开始研发的“鱼鹰”号无人机最早实现这种倾转模式[1]。这种无人机的飞行模式分为3种模态:固定翼模态、倾转过程模态与四旋翼模态。四旋翼模态可以使无人机进行垂直起飞与降落,减少传统固定翼无人机起飞所需要的空间;固定翼模态可以进行高效率远距离的航行;倾转过渡模态是这两种模态的衔接过渡过程[2]。
本文对四旋翼的倾转旋翼无人机任务模式分析并进行了动力学建模。通过拉力实验得到了模型中常系数。通过对倾转过程的研究,规划倾转过程控制策略,并为此设计了控制电路,使得飞行器的可以在预定时间内完成倾转过程。
1 动力学建模
为便于对无人机飞行状态的研究,本文将引入两个基本坐标系:地球表面惯性坐标系与机体坐标系。利用地面惯性坐标系e研究了无人机相对于地面的运动状态,确定了机体的空间位置坐标。假设地球表面是一个平面,在地面上选一点Oe作为无人机的起飞位置[3]。Xe轴在水平方向上,Ze轴垂直于地面向下,确定Ye轴的右手坐标系为地理坐标系。机体坐标系b,其原点Ob取在飞行器的重心上,机体坐标系与飞机固连(通过将传感器固定在飞行器上,采用数学算法确定出机体坐标系)。Xb轴正方向指向机头方向(机头方向与多旋翼“+”字形或“X”字形相关),Zb轴垂直Xb轴向下,最后确定Yb轴的右手坐标系。
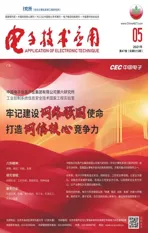
通过绕3个坐标轴旋转欧拉角φ、θ、ψ 将地球表面惯性坐标系转动到机体坐标系,3次转动可以用数学方法表述成3个独立的方向余弦矩阵,定义如下。
从地理坐标系到机体坐标系的变换矩阵为:

式中,φ 表示旋转过程中自转角大小。
从地球表面惯性坐标系到机体坐标系的变换矩阵为:
式中,θ、ψ 分别表示旋转过程中章动角、进动角大小。
倾转旋翼无人机控制逻辑用于控制倾转旋翼无人机3个关键的飞行模态:垂直起降、倾转模态以及固定翼模态[4-5]。飞行任务流程如图1所示。

图1 全模态自主飞行流程图
起飞阶段,无人机为四旋翼模态,通过调整油门使4个螺旋桨转速变快,拉力变大。当拉力大于重力时无人机完成垂直起飞。起飞后无人机可以在此模式下进行低速巡航。当无人机达到指定高度后,利用四旋翼进行无人机悬停。此后接受倾转指令,无人机的前两个倾转舵机进行倾转,拉力沿水平方向上的分力使得无人机具有前飞加速度,前飞速度变大。拉力垂直方向上的分力减小,需要提供更大转速而获得更高的拉力来平衡重力。待无人机完成倾转过程后,进入固定翼模态。此时启动无人机副翼舵机与V型尾翼舵机进行姿态控制,无人机可以进行高速度、远距离的巡航与观测。巡航任务完成后,无人机需要进行一个逆倾转过程,此过程与倾转过程是对偶的。倾转舵机由水平方向向垂直方向进行倾转,拉力的垂直方向分力逐渐变大,平衡重力所需要的拉力逐渐减小。则转速控制变慢,拉力的水平分方向力减小,加速度减小,由空气阻作用,前进速度也逐渐降低。无人机在完成逆倾转过程后,转变为四旋翼模态,降低油门可以进行垂直降落。倾转过程与逆倾转过程需要进行准确的控制。倾转时间上的控制也尤为重要。在不同模态下,控制模式不同,控制模式总结如表1所示。

表1 不同模态下的控制模式
在不同模态下,倾转旋翼无人机控制策略与方法不同,其力与力矩的执行单元也不同。图2为倾转旋翼无人机在倾转过渡过程中受力示意图。

图2 倾转过渡过程中受力分析示意图
倾转过程中稳态时,受力关系如下:

其中,重力加速度g=9.8 m/s2,a为飞机前飞加速度,T1、T2、T3、T4分别表示4个桨叶提供的拉力,Ω1、Ω2、Ω3、Ω4分别表示4个桨叶的转速,δ1、δ2表示倾转桨叶与飞机前飞方向夹角。
无人机的主要动力来源是桨叶旋转提供的拉力。对于桨叶提供的拉力大小常用叶素法分析,将桨叶沿径向分为无限个微小的片段,每一个微小片段均被等效成一个小型固定翼叶片,并推导其升力大小,即计算每一个叶素上的气动力,最后将这些叶素上的气动力积分求和,得到该桨叶的总气动力大小[6]。
叶素升力求解公式为:

其中,c为叶片弦长,q为动压,Δr为叶片截面的微分。CTe是叶素升力系数,为迎角α 的函数;Ti为叶素产生的拉力大小。

其中,ρ 为来流空气密度,Ve为叶素速度大小。
积分求得:

即Ti=KTΩ2,其中升力系数:

式中,Ω 为叶片旋转的角速度,R为叶片半径,Kα为失速前叶素升力系数与迎角之间的线性系数,θt为叶片安装角,φt为叶片入流角。
2 模型参数测量
利用SolidWorks对无人机进行模型分析,得到无人机得准确数据[7-9]。由于电池与控制模块的放入,使得重心不能以软件输出的结果为准,本文采用三线法测量无人机的重心:在无人机上选取3个任意点,用悬线将其拉起,待机机体稳定后,记录悬线及其延长线位置,3条悬线交点即为重心位置。在不同模态下无人机重心测量结果表明,重心位置基本重合,所以可以忽略倾转舵机的位置变化对重心位置的影响。对于电机与桨叶组合的拉力系数和电机、舵机的响应特征需进行实验测量。
2.1 旋翼拉力系数测量
由前面分析可知,旋翼产生的拉力大小Ti和力矩与转速Ω(弧度每秒)的平方成正比,即:

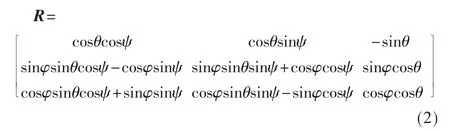
本小节对该模型中系数KT行测量。采用非接触光电式转速计进行转速测量。转速计(VICTOR 6234P)的准确度为±(0.5%+5)。采用Mayatech MT10PRO航模桨叶测试专用拉力计进行拉力的测量,量程为0~10 kg。通过在STM32单片机开发板编写程序对旋翼转动时的PWM生成与时间进行记录,利用安捷伦E3632A稳压电源提供电机的直流电能,并记录电流值,从而通过拟合得到相关系数,实验装置结构如图3所示。
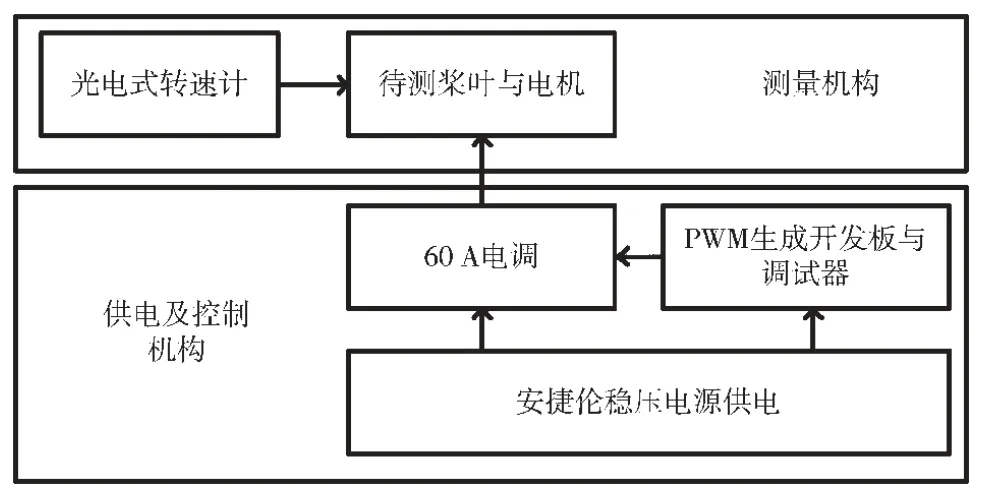
图3 拉力试验平台布置图
实验过程:将稳压电源调至6S电池供电(即22.2 V供电电压)。通过调节开发板程序,改变PWM脉冲时间。在不同的PWM脉冲时间采集转速、拉力数据及对应变化时间。考虑转速计和拉力计的量程范围,PWM的脉冲时间设置为由1 ms逐步增加到1.5 ms。为减小由震动对测量结果的影响,每次测量均读取超过10 s后的稳定拉力数据,且利用多次测量求取平均值的方法减少测量误差。拉力计读数Ti与转速平方的拟合结果如图4所示。测量出的坐标点均匀地分布在拟合结果两测,验证了叶素法的分析结果的准确性。通过拟合得到的关系式如下:

其中,Ω 为转速大小,单位为r/min。
图4 拟合结果图
2.2 电机和舵机响应特性测量
电机的响应特性可以近似为[10]:

其中,Ωc为旋翼的转速期望;kw为转速变化系数,kw的大小与电机的响应速度成正相关。对于kw采用系统辨识法进行辨识测量[11]。对待测电机施加1 150 r/m的阶跃响应信号,记录转速与到达该转速所用时间。在MATLAB中的系统辨识工具箱(System dentification)进行辨识[12],拟合结果如图5所示。

图5 电机转速响应
由辨识结果得响应特性为:

其他执行机构响应特性(如舵面的舵机和倾转机构的舵机可以选用的舵机参数)用一阶惯性环节近似。副翼与尾翼舵机的响应特性近似结果为:

倾转机构舵机的响应特性近似结果为:

3 系统硬件电路设计
为使无人机的3种模态得以确定,需要10路PWM信号来控制电机和舵机的运动。因此选用两片STM32单片机进行控制,其中主单片机进行算法与飞行姿态信息的解算[13],并对4个旋翼电机进行PWM信号输出与控制。协处理器主要是对惯性监测单元MPU6050模块的数据进行采集,并完成对6个舵机的PWM信号输出与控制[14]。系统电路结构图如图6所示。
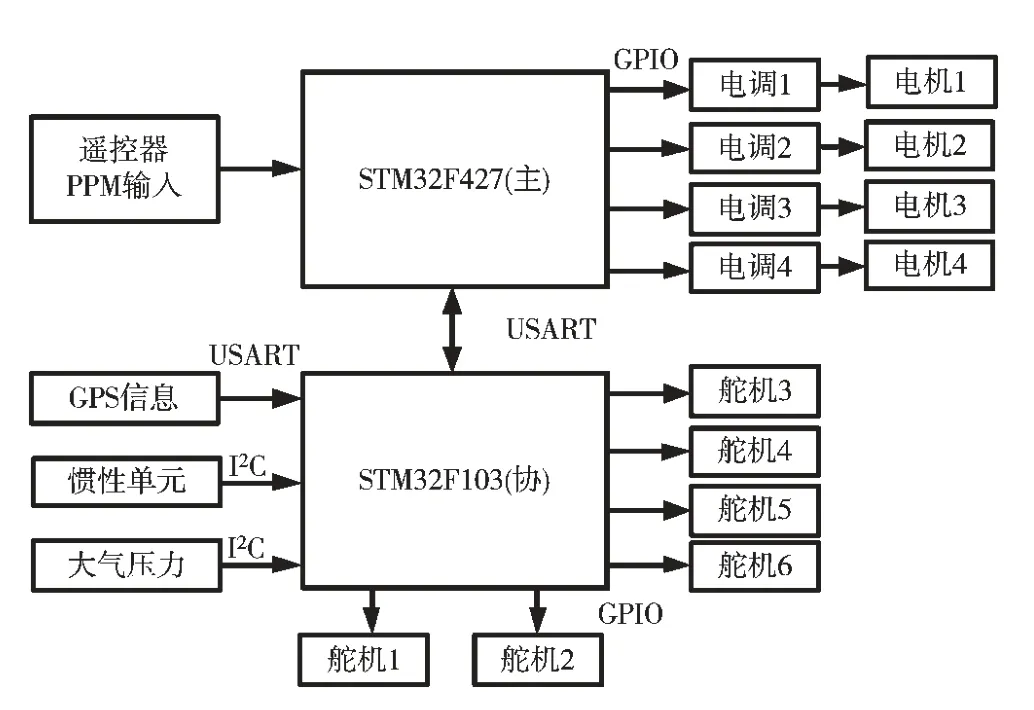
图6 系统电路结构电路图
无人机选择6S-Li电池,经计算电压为22.2 V~25.2 V。由于舵机需要5 V供电,单片机需要3.3 V供电,因此要对电源进行DC-DC降压处理。分别采用LM2596与LT11293作为降压IC[15-17],电路原理图如图7所示。
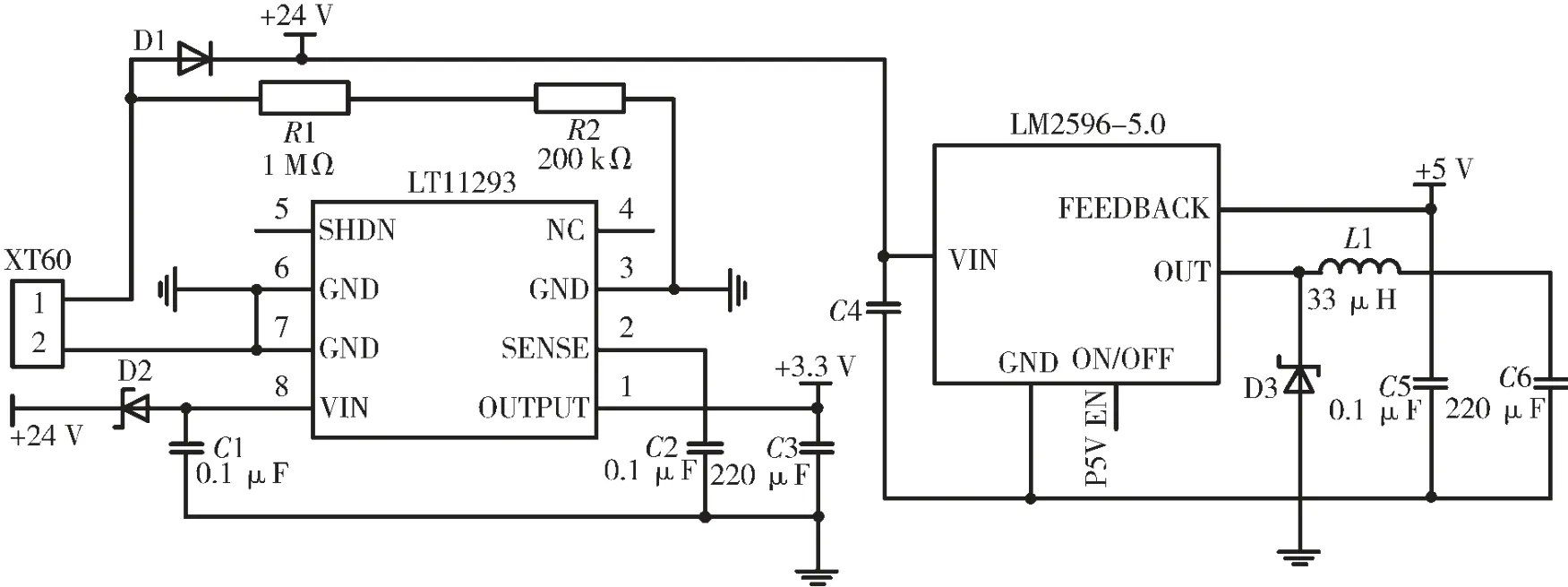
图7 电源部分原理图
4 倾转过程控制策略
在倾转四旋翼无人机过渡态飞行模式中,倾转舵机由垂直方向倾转至水平方向,桨叶提供的拉力在水平方向的分量随着倾转过程变大,由牛顿第二定律,可以确定无人机的前飞速度也在增大,则机翼提供的升力也变大。拉力的垂直方向上的分量随着倾转角的变化逐渐变小。为保证过程的平衡,对倾转角变化速度进行控制[18]。由前二部分分析结果式(3)、式(9)计算得出倾转过程中转速、拉力以及前行速度之间的关系,即倾转走廊。
依据选取的舵机转速范围[19],本文设计过渡过程中倾转舵机可以进行21 deg/s的匀速转动。为保证可以平滑地进行转动,在倾转的开始后与结束前进行线性的增加或减小。为保证设计结果的性能要求,倾转过程保证在5 s内完成。本文设计转速Ω 与时间t的关系为:

通过对倾转角转速变化规律积分可以得到倾转角变化规律,其中两个倾转角δ 保持时刻相等,即:

由于前行速度与倾转舵机角度之间的制约关系,需要对倾转过程控制回路进行设计。回路结构如图8所示。

图8 倾转控制回路
5 样机测试实验
倾转测试实验首先将遥控器的油门进行校准,校准结果为最大舵量2 015 μs(即PPM信号中油门通道脉冲时间),最小舵量991 μs。供电后通过遥控器通道5进行模式切换,倾转电机进行倾转。改变油门大小进行反馈测试,记录倾转过程时间。实验数据如表2所示。

表2 空载倾转实验时间数据
由表中数据可以验证空载时,电机转速全范围都可以控制倾转时间小于5 s,完成规划要求。
对于倾转控制反馈回路,测试现象如下:减小油门,倾转舵机倾转角变小;抬高油门,倾转舵机倾转角变大。同时对固定翼副翼提供的姿态调节反馈进行测试,手动改变无人机姿态,无人机各翼提供相应的舵量控制。
6 结论
倾转四旋翼无人机结合了四旋翼无人机与固定翼飞机的优势,它可以在很多不宜小型四旋翼无人机飞行的环境下进行巡航任务。这种无人机也来越来越受到重视,在这样的背景下,本文设计出一款倾转四旋翼无人机,完成对倾转时间的稳定控制。经过对倾转旋翼无人机的运动学建模,确定控制量以及所需要的力学参数。并且通过实验完成旋桨拉力系数、电机的响应特性的系统辨识。同时,本文完成了电路结构的设计,并对倾转过程控制反馈的调节。样机测试实验表明,本文设计的结构可以完成规划时间内的倾转,并有稳定的反馈效果。