基于无人机多光谱的沼泽植被识别方法
2021-05-28左萍萍付波霖蓝斐芜解淑毓何宏昌范冬林娄佩卿
左萍萍,付波霖,蓝斐芜,解淑毓,何宏昌,范冬林,娄佩卿
基于无人机多光谱的沼泽植被识别方法
左萍萍,付波霖*,蓝斐芜,解淑毓,何宏昌,范冬林,娄佩卿
(桂林理工大学测绘地理信息学院,广西 桂林 541006)
为了探究高分辨率无人机多光谱数据对沼泽植被群丛识别能力,在洪河国家级自然保护区的核心区、缓冲区和实验区分别建立典型样区,通过低空无人机搭载的RGB及多光谱相机获取研究区正射影像,构建多维数据集并确立4种分类方案.采用面向对象的随机森林(RF)算法,对输入的多维数据集进行变量选择和参数(mtry、ntree)调优,构建适合沼泽植被群丛尺度识别模型.结果表明:优化的面向对象的RF算法对沼泽湿地植被具有较高的识别能力,在95%的置信区间内,核心区方案四(结合了光谱波段、纹理特征、几何特征、位置特征、地表高程信息和植被指数)获得最高总体精度为87.12%,kappa系数为0.850,比方案二(结合了光谱波段、几何特征和位置特征)总体精度高12.27%,kappa系数高0.140;对于单一典型沼泽湿地植被识别精度中,芦苇获得最高的用户精度高于88%,生产者精度高于90%,小叶章的生产者精度高于85%,但是在核心区用户精度较低,仅为78%.该方法可以作为沼泽植被群丛识别的有效方法,为研究沼泽湿地生态环境变化提供更准确的数据支持.
无人机多光谱数据;随机森林算法;多维数据集;变量选择;参数调优
湿地是陆地和水生系统之间的过渡地带,是地球上最重要、最有价值的生态系统之一[1-2].湿地植被是湿地生态系统的重要组成部分,对环境保护起着至关重要的作用[3-4].湿地植被的动态变化能够反映湿地的生态环境变化,被认为是一个反映湿地环境变化的敏感指示器[5].因此,详细了解和掌握湿地植被的空间分布有助于正确认识和发挥湿地的资源优势,也可以为湿地植被恢复技术和区域生物多样性及其形成机制研究提供数据支持.
由于大多数湿地位于偏远且难以到达的区域,卫星遥感技术已被广泛应用于湿地类型识别、信息提取、动态变化监测及资源调查等方面的研究[6].目前中高分辨率的遥感影像已广泛应用在湿地植被分类中,如程琳琳等[7]以多光谱和全色影像融合后的GF-1影像为数据源,采用最邻近法对河流湿地和景观湿地的影像进行分类.结果表明:分类精度达到96.95%,kappa系数为0.9584.李恒凯等[8]以GF-1的16m WFV遥感影像为数据源,采用极大似然法、非监督分类和面向对象的CART决策树分类法对研究区土地利用分类信息.结果表明:3种分类方法中, CART决策树分类获得最高的分类精度为93.27%, Kappa系数高达0.92.上述都采用了面向对象的分类方法并对输入的特征变量进行筛选,减少数据的冗余,获得最佳变量,但是未对面向对象的分类方法进行优化,提高分类方法的稳定性.王猛等[9]以1.2m分辨率WorldView-3的卫星影像作为数据源,通过特征选择、调整随机森林决策树的数量,构建了适合森林分类的面向对象的随机森林模型.结果显示,分类总体精度达到83.34%,kappa系数为0.7892.Lou等[10]以GF-1和ZY-3遥感数据为数据源,采用优化的面向对象的随机森林算法和变量选择对沼泽湿地植被进行分类.结果表明:在95%的置信区间内所有方案总体精度均达到70.26%以上.以上研究证明,优化随机森林算法对处理多维数据集具有优势,从而提高分类精度.但中高分辨率的星载光学遥感数据受天气和云量影响大[11].近年来小型无人机迅速发展,具有操作简单,使用灵活,空间分辨率高,低成本,高时效且在云下操作等特点,弥补了卫星遥感影像的应用限制[12].
UAV影像为开展湿地植被的空间分布信息提取,掌握其发展趋势,监测湿地生态环境系统的动态变化等研究,提供了极佳的遥感数据源[13-15]. Pande- Chhetri等[16]运用无人机搭载真彩色Olympus ES 420相机获取的航摄影像为数据源,采用3种分类器(支持向量机、人工神经网络和最大似然法),研究基于多分辨率目标的分类方法在湿地植被中的应用.结果表明:在相同的分类方案下,基于支持向量机的对象分类总体准确率为70.78%,表现出最好的分类效果. De Giglio[17]为了确定沙丘植被群落识别所能达到的详细程度,对无人机影像采用4种分类算法,其中基于像素的最大似然(ML)、最近邻(NN)和支持向量机(SVM)算法分类总体精度分别是53.6%、50.9%和56.8%.以上研究证明了,对于超高空间分辨率(厘米级)UAS影像,采用面向对象的机器学习算法对湿地植被识别性能更好[18].肖武等[19]利用无人机多光谱航摄影像对采煤沉陷湿地植被进行面向对象分类和监督分类.结果表明:面向对象分类方法可以有效提取湿地植被,提取精度为84.2%,Kappa系数为0.8,除香蒲外, 各类地物分类精度都在80%以上.娄佩卿等[20]以无人机获取农耕区正射影像为研究区,分别采用基于像元和面向对象的影像分析技术与支持向量机(SVM)算法相结合.结果表明:耕地+居民地复合区影像基于像元整体分类精度为69.93%,Kappa系数为0.65.上述研究都采用面向对象分类方法,构建多维数据集,但是未对分类方法进行优化和变量选择,导致分类的总体精度偏低.刘舒等[21]运用大疆精灵4获取研究区域正射影像,采用随机森林算法并对其参数进行调优和Boruta特征选择.结果表明:随机森林算法更擅长处理高维数据集,获得最高的总体精度98.19%,kappa系数为0.980.耿仁方等[22]以大疆御Mavic Pro无人机影像为数据源,优化面向对象随机森林算法和变量选择对会仙岩溶湿地植被进行分类.结果显示,在95%置信区间内总体精度达到86.75%,Kappa系数为0.83.对单一典型岩溶湿地植被狗牙根-白茅-水龙获得最高的用户精度为92.86%,生产者精度为82.98%,标准差为2%.以上研究论证了随机森林算法具有高效处理高维特征的优势.但是,上述研究只采用了无人机(RGB)影像,对具有相似的光谱特征的植被识别能力较弱.
综上所述,为了对沼泽植被实现群丛尺度识别,本文以洪河国家级自然保护区为研究区,分别在核心区、缓冲区和试验区选择3个典型样区,整合无人机多光谱数据和优化的面向对象RF算法构建沼泽植被群丛尺度识别模型,评估其对沼泽植被群丛的识别能力.
1 研究区概况与数据源
1.1 研究区概况
洪河国家级自然保护区位于中国黑龙江省的东北部,地理位置为133°34¢38²~133°46¢29²E, 47°42¢18²~47°52¢00²N,该地区地势总体平坦,坡度约为1/5000~1/10000,保护区占地面积为21835hm2, 2002年1月被国际湿地公约组织列为国际重要湿地名单,保护区属温带湿润半湿润季风性气候,年平均气温为1.9℃,年均降水量约为600mm.保护区内的植被仍保持原始状态,以草本沼泽植被和水生植被为主,沼泽植被的代表是毛果苔草、乌拉苔草、甜茅、小叶章和芦苇等.洪河湿地根据保护区自然资源分布状况和特殊的地理分布,划分为核心区(保存着较为完整的原始湿地生态系统和生物多样性,是主要保护鸟类的集中分布区)、缓冲区(保存着原生和部分原生性湿地生态系统类型,对核心区起到天然屏障和缓冲作用)和实验区(除部分耕地以外的其他湿地还保存完好,并开展了科研教学、环志、濒危物种人工饲养和农业生产等活动)3个功能区域[23].本文分别在这3个样区中选择具有相同的典型沼泽植被类型作为本文的研究区,具体如图1所示.

图1 研究区地理位置
A位于核心区、B位于缓冲区、C位于实验区
1.2 无人机多光谱数据与预处理
以核心区为例,无人机原始航拍影像采集于2019年8月29日上午11:00~12:00,采集过程中天气晴朗,无风,视野良好.试验采用大疆精灵4Pro搭载RGB和Survey3W-OCN相机同时进行航摄,航向重叠率80%、旁向重叠率70%,飞行高度为110m,获得606张无人机影像和1294张多光谱影像.
多光谱影像包括两种格式,分别为RAW和JPG,不能直接对多光谱原始影像处理,需要对其进行辐射定标.辐射定标是采用MAPIR公司自带的处理软件将多光谱影像DN值转化为反射率.本文利用Pix4D Mapper专业级无人机图像处理软件对无人机和辐射定标后多光谱影像进行处理.具体处理过程包括:①导入原始航拍影像、经纬度坐标以及飞行姿态等POS数据;②影像质量检查,剔除航向重叠率小于70%、旁向重叠率小于60%、起飞和降落、曝光不足与过度的影像,保证进行空三解算和构建加密网的精度;③影像数据自动匹配、空三解算和区域网平差,生成研究区密集点云数据;④利用密集点云数据构建研究区不规则三角网(TIN),生成研究区数字地表三维模型(DSM);⑤利用地表三维模型和空三解算参数、通过影像匀色、拼接和裁剪处理,得到研究区数字正射影像图(DOM).
1.3 样本数据采集
实地调查于2019年8月24~30日进行,样本数据获取主要有2种途径:一种方法是通过手持厘米级定位精度的RTK进行拍照记录,如白桦林、白杨林和灌木;另一是采用大疆御Mavic Pro无人机搭载的FC220相机进行航摄,飞行高度为30m,对航拍的影像进行解译确定植被类型,如小叶章、塔头苔草和芦苇.本文综合考虑了野外实地调查结果和无人机影像特征,确定分为水体、白桦林、白杨林、退化白桦林、灌木、小叶章、塔头苔草、小叶章和塔头苔草混合、芦苇和道路等10种类别,并使用ArcGIS10.5的地统计分析模块中的Subset Features工具将实地采样数据获取样本数据按照7:3的比例随机分成训练和验证样本数据,具体如表1表示.

表1 研究区各类训练和验证样本数据
注:A代表水体;B代表白桦林;C代表白杨林;D代表退化白桦林;E代表灌木;F代表道路;G代表小叶章;H代表塔头苔草;I代表小叶章与塔头苔草混合;J代表芦苇;代表总数.
2 研究方法
2.1 无人机影像多尺度分割
本文在eCognition Developer 9.01软件中采用湿地植被信息提取应用最广泛的多尺度分割算法.在多尺度分割算法中主要有3个重要参数:尺度参数、形状权重和紧凑度,其中尺度参数是多尺度分割算法最为核心的参数,对分类精度影响较大,颜色与形状权重、平滑度与紧凑度权重的和分别为1.
对无人机影像进行多尺度分割时,首先需要确定的形状权重和紧凑度参数.已有研究表明,颜色/形状权重为0.7/0.3,平滑度/紧凑度权重为0.5/0.5的对象最容易识别不同的沼泽植被斑块[24].因此,本文中形状权重和紧凑度权重分别设置为0.3、0.5.在确定这2个参数后,利用eCognition Developer最佳分割尺度评价工具ESP2进行迭代分割,以选取多尺度分割最优的分割尺度参数[25].确定形状权重和紧凑度权重为0.3、0.5后,每个样区的最大分割尺度和最小分割尺度如图2所示.

图2 在形状权重和紧凑度权重分别为0.3、0.5条件下,3个样区最大分割尺度和最小分割尺度
2.2 构建多维数据集

表2 植被指数计算公式
注:NIR代表近红外波段;代表红波段;代表绿波段;代表蓝波段.
当用光学数据分类时,由于它们具有相似的光谱响应,无法将某些光谱曲线相似的沼泽植被群丛区分开,因此本文进一步提取了影像的纹理特征、几何特征、位置特征、地表高程信息和植被指数,综合利用以上特征信息进行沼泽湿地植被群丛识别,最终确定的多维数据集包括:
(1)光谱特征:无人机影像红绿蓝波段(RGB)、多光谱影像橙青近红外波段(OCN)和DSM光谱特征的平均值、标准偏差、亮度和波段最大差异.
(2)纹理特征:通过灰度共生矩阵(GLCM)来提取DOM和DSM的纹理特征.本文使用9×9的窗口和64个灰度量化级别的GLCM来生成平均值、方差、同质性、对比性、异质性、信息熵、角二阶距和相关性.
(3)植被指数:为了消除不同辐照度对植被光谱特征的影响,更好地区分不同地物类型,提高沼泽湿地植被群丛的识别精度,本文计算了5个无人机植被指数和18个多光谱植被指数[25-28].具体如表2所示.
(4)几何特征:提取不对称性、形状指数、紧凑型、密度、面积、宽和长宽比周长比等特征.
(5)位置特征:提取坐标中心点位置特征、坐标到左/右边框的距离、坐标的最大值和坐标的最小值等特征.
根据光谱特征、影像多尺度分割后的几何特征与位置特征、纹理特征和植被指数构建多维数据集,建立了4种分类方案,如表3所示.

表3 3个样区的4种分类方案
2.3 构建沼泽植被群丛尺度识别模型与精度评价
随机森林(RF)分类器是由Breiman在1995年Bell Labs原始版本的基础上开发的一种结合去除相关性较弱的集成分类器[29].RF分类器具有高效处理多维数据集并不会出现过拟合的优势[30].
本文采用RF分类器对构建的多维数据集进行递归特征消除(简称RFE)和参数调优,构建适合沼泽植被群丛尺度识别的模型并对3个典型样区中的10种类型进行分类,通过验证样本数据集来评价分类精度和准确度.具体内容如下:①采用R编程语言,在Rstudio平台上首先对每个方案进行去除高相关性(去除相关系数大于0.95的变量),然后以每个方案的训练样本数据集为输入变量,再采用RFE来去除多维数据集中无关和冗余变量,确定总体精度最高的最佳变量个数.RFE变量选择是采用10倍交叉验证重采样方法,开始使用所有的训练数据集中的特征构建模型并通过得分来衡量不同特征重要程度,然后删除本次特征集合中得分最低的特征,用剩余的特征集合建模,然后重复进行迭代,直到输入数据集为空,从而确定最佳变量个数.②已有研究表明,RF算法中的默认mtry数是输入变量总数的平方,默认ntree数是500[31].RF算法虽然采用默认参数进行沼泽植被识别,总体精度较高,但极不稳定,不具代表性.与默认参数相比,优化参数的整体精度更稳定[10].因此本文以最佳变量构成的训练数据集为输入变量对RF分类器进行参数调优,确定mtry的范围为1~15;ntree的范围为0~2000,步长为100.每个方案使用mtry和ntree的不同组合迭代训练15次,以找到总体精度最高的最优组合.
为了评估构建沼泽植被群丛尺度识别模型分类结果的准确性,以及评估无人机多光谱遥感数据在沼泽湿地植被分类中的有效性,利用实地采集的验证样本对分类结果进行精度验证,在95%的置信区间对3个样区4种分类方案建立混淆矩阵分别计算分类结果的总体精度、Kappa系数、各类别的用户精度和生产者精度.本文技术路线如图3所示.

图3 研究技术路线
3 结果分析与精度验证
3.1 最优变量选择
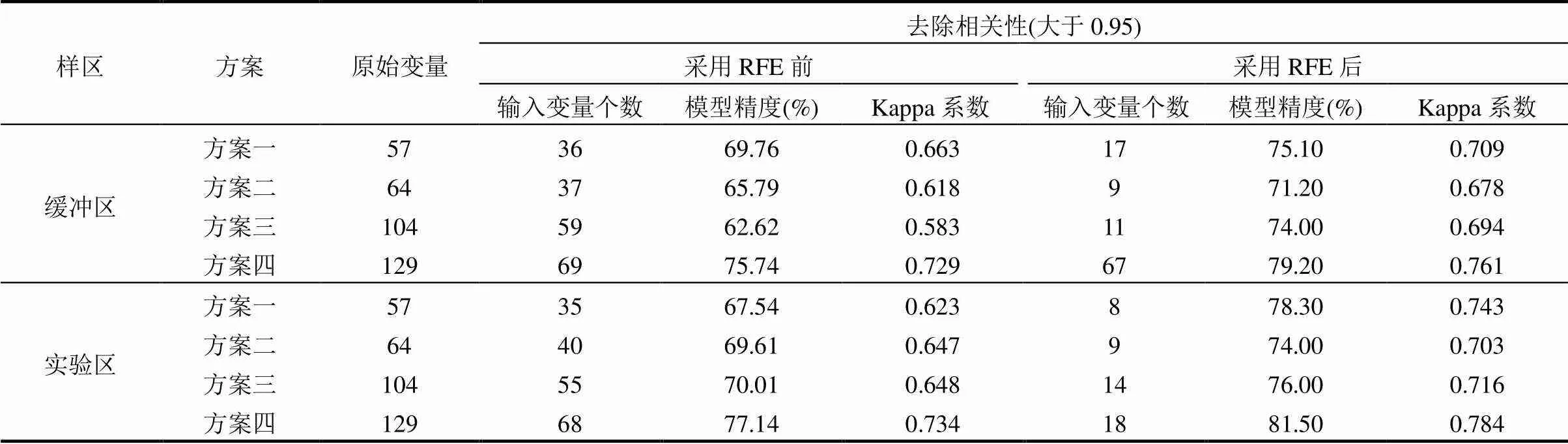
对3个样区的4种分类方案进行RFE变量选择,结果如表4所示,采用RFE后,核心区方案一输入9个变量(缓冲区为17个、实验区为8个)时,在95%置信区间内的模型训练精度提高到79.50%(缓冲区为75.10%、实验区为78.30%).核心区方案二输入7个变量(缓冲区为9个、实验区为9个)时,在95%置信区间内的模型训练精度提高到73.00%(缓冲区为71.20%、实验区为74.00%).核心区方案三输入11个变量(缓冲区为11个、实验区为14个)时,在95%置信区间内的模型训练精度为75.10%(缓冲区为74.00%、实验区为76.00%).核心区方案四输入16个变量(缓冲区为67个、实验区为18个)时,在95%置信区间内的模型训练精度达到82.50%(缓冲区为79.20%、实验区为81.50%).对3个样区的每种方案进行RFE变量选择后,模型训练精度都提高了,提高最多的缓冲区方案三(提高了11.38%),论证了去除多维数据集中无关和冗余变量可以提高面向对象的RF分类器在沼泽植被识别中的性能.
对于3个样方区的方案一,经过RFE变量选择之后构建的RF模型训练精度比输入全部非高相关变量构建的RF模型训练精度,分别提升了8.00%、5.34%和10.76%.在输入的3个光谱特征、几何特征和位置特征中,波段最大差分、光谱波段的平均值和标准偏差的重要性最高.方案二模型训练精度分别提升了4.00%、5.41%和4.39%.比方案一多加入的多光谱特征中多光谱波段标准偏差获得较高的重要性.方案三模型训练精度分别提升了5.97%、11.38%和5.99%,比方案二多加入的纹理特征中同质性的重要性较高.每个样区方案四的模型训练精度都是最高的,分别为82.50%、79.20%和81.50%,比输入全部非高相关变量构建的RF模型训练精度分别提高了3.40%、3.46%和4.36%,其中5个无人机光谱指数、DSM和光谱波段的标准差的重要性最高,具体如表4和图4所示.

表4 采用RFE变量选择前后,RF训练精度的对比
续表4

图4 基于RFE变量选择的前10个最佳变量及重要性排序
3.2 沼泽植被群丛尺度识别模型参数调优
通过RFE变量选择后,确定最佳变量个数;调整参数确定面向对象的RF分类器的mtry和ntree最优组合并进行迭代训练.图5显示3个样区中训练样本数据的4种方案的学习曲线,随着mtry和ntree.数量的增加,模型的训练精度呈上升趋势,当ntree为1000时,具有不同mtry值的每个分类方案的总体精度的波动趋于平稳.

图5 3个样区不同mtry和ntree组合与RF训练精度变化趋势(变量选择后)

表5 3个样区最佳mtry和ntree组合的RF训练精度(变量选择后)
根据表5对核心区、缓冲区和实验区4种分类方案的参数调优结果进行分析可知,多光谱数据添加到多维数据集中时,3个样区中方案二的模型训练精度比方案一分别降低8.02%、3.11%和3.17%,说明多光谱数据对沼泽植被群丛识别性能不如无人机数据,可能是多光谱影像存在噪声,降低了模型精度和效率.方案三比方案二多加入了40个纹理特征,但是RF模型的训练精度并没有明显变化,核心区提升了1.54%、缓冲区下降了1.50%、实验区下降了0.19%.方案四结合了光谱数据、光谱指数、DSM、位置特征、几何特征和纹理特征,RF模型训练精度达到最高分别为81.83%、79.23%和79.36%.比方案三多加入了23个植被指数和DSM,RF模型精度分别提高了9.26%、8.86%和5.61%,说明DSM和光谱植被指数有效的提高分类精度.
3.3 沼泽植被群丛分类结果及精度分析
综合3个样区的4种分类方案的分类效果图,发现核心区中乔木(白桦林和白杨林)和灌木主要分布靠近陆地的区域;浅水沼泽植被是由陆地过渡到浅水中,分布顺序依次是小叶章、小叶章与塔头苔草混合、塔头苔草和芦苇;退化的白桦林主要分布在浅水沼泽植被附近.缓冲区和实验区中10种类别的空间分布与核心区保持一致.

图6 核心区沼泽植被分类结果对比
核心区方案一,水体中有部分图斑被错分为小叶章类型,在方案二中错分现象严重,可能与该区域水体的颜色较深、较亮,光谱特征取值与小叶章接近有关.引入纹理特征时(方案三),上述错分有所改善,却进一步加剧部分芦苇被错分为灌木的现象.引入指数特征和DSM时(方案四),水体与小叶章错分现象有明显改善,但出现小斑块芦苇误分为水体(图6).缓冲区4种分类方案都存在水体与道路错分(图7),这是由于获取缓冲区影像时,水体淹没栈桥造成影像上栈桥表层光谱特性与水体相近,这种同谱异物现象造成沼泽植被群丛尺度识别模型混淆提取水体和道路.实验区方案一中存在灌木和乔木(白杨林和白桦林)错分现象,在方案二中错分现象明显加剧,可能与该区域光谱信息比较多样,部分灌木和乔木具有相似的光谱曲线,因此对于利用光谱特征的分类方案,区分效果不明显,易造成误分现象.当加入纹理信息后(方案三),分类结果中小面积斑块减少,灌木和乔木的混分现象减少.引入指数特征和DSM时(方案四),灌木和乔木错分现象有明显改善,因为DSM提供的地表高程信息可以很好的将乔木同灌木区分开(图8).上述各样区中方案四错分现象都有所改善,分类效果最好,分类结果能够准确描述保护区内沼泽植被的空间分布位置,可以说明优化的面向对象的随机森林算法模型对沼泽植被群丛具有较高的识别能力.
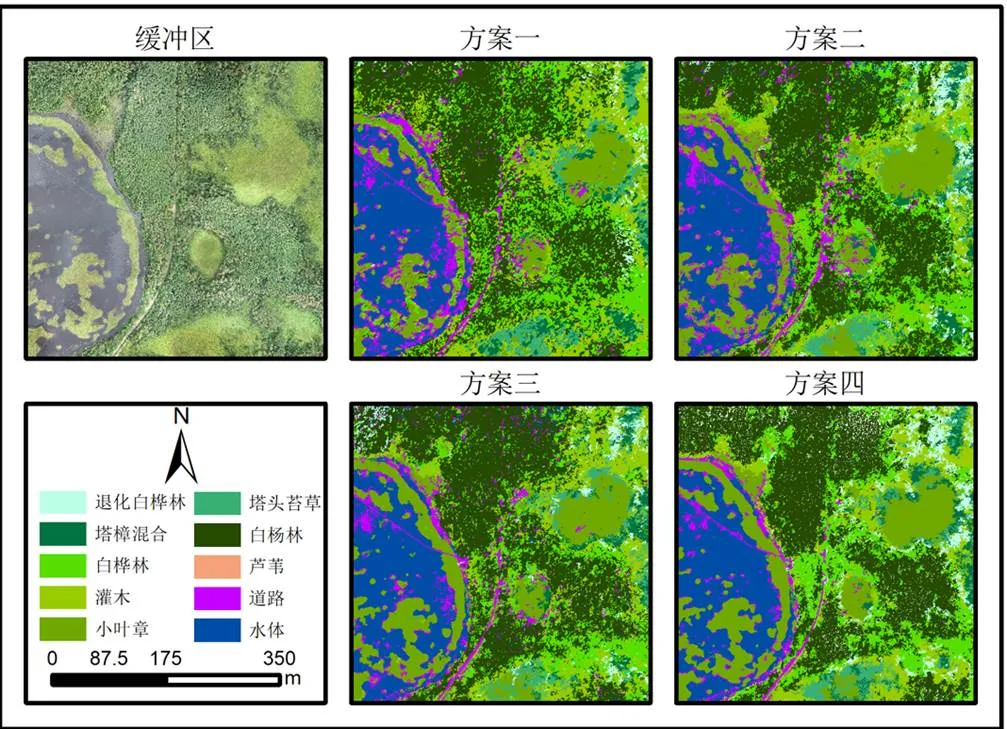
图7 缓冲区沼泽植被分类结果对比

图8 实验区沼泽植被分类结果对比
由表6可知,通过变量选择和参数调优后,每个样区的方案四在95%的置信区间内的总体分类精度最高(87.12%、83.33%和83.82%),说明在光谱波段、光谱指数、DSM、纹理特征、位置信息和几何信息的共同作用下,可以提高沼泽植被群丛识别的总体精度;其次是方案一的总体分类精度(83.23%、79.11%和81.46%),说明无人机影像是区分沼泽植被群丛重要的数据源;方案二在95%的置信区间内的总体分类精度最差(74.85%、74.84%和74.88%),这可能是多光谱影像存下噪点,不易区分光谱相似的沼泽植被群丛;其次是方案三的总体分类精度(77.91%、77.42%和75.86%),比方案二分别提高了3.06%、2.58%和0.98%,说明纹理特征可以提高沼泽植被群丛的总体分类精度.
为了评估随机森林分类器对沼泽植被群丛分类结果的准确性,以及无人机多光谱在沼泽湿地植被识别中的有效性,利用实地采样数据获得的验证样本,建立混淆矩阵和计算各类的用户精度与生产者精度(表7).核心区方案四对水体、白桦林、退化白桦林、灌木、道路、小叶章和塔头苔草混合和芦苇的识别能力较好,用户精度在91%以上;用户精度最低的是塔头苔草45.4%,生产者精度为41.6%,这是由于塔头苔草与小叶章混合生长条件与分布一致,存在光谱特征和纹理特征的相似性,导致不易区分.缓冲区方案四对水体、白桦林、灌木、道路、小叶章和芦苇的分类最好,用户精度都为86%以上,小叶章和塔头苔草混合用户精度最差,为63.6%.实验区方案四中水体、白杨林、道路和小叶章的分类最好,用户精度都为91%以上,其中白桦林用户精度为77.8%,而生产者精度最低,为46.7%,这可能由于沼泽湿地植被类型分布不均一,散碎斑块较多,使白桦林与小叶章与塔头苔草的混合出现错分现象.

表6 3个样区RF分类结果的验证精度

表7 沼泽湿地地物类型混淆矩阵(方案四)

续表7
注:A代表水体;B代表白桦林;C代表白杨林;D代表退化白桦林;E代表灌木;F代表道路;G代表小叶章;H代表塔头苔草;I代表小叶章与塔头苔草混合;J代表芦苇;代表总数;代表用户精度;代表生产者精度.
3个区域中对于水体、道路、白桦林和芦苇分类精度比较好,用户精度均在80%以上,这是由于随机森林算法对于纹理特征均一的地物或植被具有较高的识别能力.对于单一典型沼泽湿地植被,白桦林其用户精度分别是100%、86.7%和83.9%,核心区分类精度最高,这是由于核心区是未经或很少经人为干扰过的原始湿地生态系统;小叶章和塔头苔草混合的用户精度分别为100%、63.6%和47.1%,实验区分类精度最低,这是由于实验区是一个多用途的地区,包括有一定范围的生产活动,还可有少量居民点和旅游设施,因此会降低对沼泽湿地植被分类效果.
4 结论
4.1 结合光谱波段、植被指数、位置特征、纹理特征和几何特征作为多维数据集输入变量,可以有效地提高沼泽植被群丛的分类精度.然而,多维数据集输入会产生许多冗余变量,降低了分类效率和准确率.基于RF的变量选择算法能有效去除相关性高的冗余变量,提高分类精度.对输入变量重要性的测量表明,无人机光谱指数(Blue、Green、Red、GLI、GRDI)、DSM和光谱波段的标准偏差等对沼泽植被群丛识别贡献率较大.
4.2 RF模型的参数调优可以有效地提高其在沼泽植被分类中的适用性,获得稳定的、高精度的分类结果.3个典型样区中方案四的获得最高的模型训练精度,其中mtry和ntree的最佳组合为3和1000、12和600、9和400,RF分类器的模型精度分别为81.83%、79.23%和79.36%,kappa系数分别为0.787、0.768和0.761.
4.3 面向对象的随机森林遥感识别模型实现了沼泽植被群丛尺度的高精度分类,3个典型样区中方案四在95%置信区间内的分类正确率最高,分别为87.12%、83.33%和83.82%,kappa系数分别为0.850、0.814和0.813.对于单一典型沼泽湿地植被识别,芦苇获得最高用户精度为100.0%和88.2%,生产者精度分别为100%和91.7%.灌木用户精度分别为100%、92.3%和87.1%,生产者精度分别为85.7%、80.0%和90.0%.验证了无人机多光谱数据和优化的面向对象RF算法构建沼泽植被群丛尺度识别模型可以实现沼泽植被群丛尺度分类,并形成了一套完整的基于低空无人机多光谱影像进行沼泽植被识别的方法.
[1] Mitsch W J. Restoration of our lakes and rivers with wetlands—an important application of ecological engineering [J]. Water Science and Technology, 1995,31(8):167-177.
[2] Guo M, Li J, Sheng C, et al. A review of wetland remote sensing [J]. Sensors, 2017,17(4):777.
[3] Kokaly R F, Despain D G, Clark R N, et al. Mapping vegetation in Yellowstone National Park using spectral feature analysis of AVIRIS data [J]. Remote sensing of environment, 2003,84(3):437-456.
[4] Yuan L, Zhang L. Identification of the spectral characteristics of submerged plant Vallisneria spiralis [J]. Acta Ecologica Sinica, 2006,26(4):1005-1010.
[5] Dennison W C, Orth R J, Moore K A, et al. Assessing water quality with submersed aquatic vegetation [J]. BioScience, 1993,43(2):86-94.
[6] 张 磊,宫兆宁,王启为,等. Sentinel-2影像多特征优选的黄河三角洲湿地信息提取 [J]. 遥感学报, 2019,23(2):313-326.Zhang L, Gong Z N, Wang Q W, et al. Extraction of Yellow River Delta wetland information based on multi-feature optimization of Sentinel-2 image [J]. Journal of Remote Sensing, 2019,23(2):313-326.
[7] 程琳琳,董雪梅,詹佳琪,等.基于面向对象的GF-1遥感影像采煤沉陷区湿地分类 [J]. 农业工程学报, 2018,34(9):240-247. Cheng L L, Dong X M, Zhan J Q, et al. Wetland classification based on object-oriented GF-1remote sensing images in coal mining subsidence area [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018,34(9):240-247.
[8] 李恒凯,吴 娇,王秀丽.基于GF-1影像的东江流域面向对象土地利用分类 [J]. 农业工程学报, 2018,34(10):245-252. Li H K, Wu J, Wang X L. Object-oriented land use classification of Dongjiang basin based on GF-1 image [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018,34(10):245-252.
[9] 王 猛,张新长,王家耀,等.结合随机森林面向对象的森林资源分类 [J]. 测绘学报, 2020,49(2):235-244. Wang M, Zhang X C, Wang J Y, et al. Object-oriented classification of forest resources with random forest [J]. Journal of Surveying and Mapping, 2020,49(2):235-244.
[10] Lou P Q, Fu B L, He H C, et al. An optimized object-based random forest algorithm for marsh vegetation mapping using high- spatial-resolution GF-1and ZY-3data [J]. Remote Sensing, 2020,12(8):1270.
[11] Mahdavi S, Salehi B, Amani M, et al. A dynamic classification scheme for mapping spectrally similar classes: Application to wetland classification [J]. International Journal of Applied Earth Observation and Geoinformation, 2019,83:101914.
[12] Böhler J E, Schaepman M E, Kneubühler M. Crop classification in a heterogeneous arable landscape using uncalibrated UAV data [J]. Remote Sensing, 2018,10(8):1282.
[13] Pajares G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs) [J]. Photogrammetric Engineering & Remote Sensing, 2015,81(4):281-330.
[14] Shahbazi M, Théau J, Ménard P. Recent applications of unmanned aerial imagery in natural resource management [J]. GIScience & Remote Sensing, 2014,51(4):339-365.
[15] Latif M A. An agricultural perspective on flying sensors: State of the art, challenges, and future directions [J]. IEEE Geoscience and Remote Sensing Magazine, 2018,6(4):10-22.
[16] Pande-Chhetri R, Abd-Elrahman A, Liu T, et al. Object-based classification of wetland vegetation using very high-resolution unmanned air system imagery [J]. European Journal of Remote Sensing, 2017,50(1):564-576.
[17] De Giglio M, Greggio N, Goffo F, et al. Comparison of pixel-and object-based classification methods of unmanned aerial vehicle data applied to coastal dune vegetation communities: Casal borsetti case study [J]. Remote Sensing, 2019,11(12):1416.
[18] Wu Q, Zhong R, Zhao W, et al. A comparison of pixel-based decision tree and object-based Support Vector Machine methods for land-cover classification based on aerial images and airborne lidar data [J]. International Journal of Remote Sensing, 2017,38(23):7176-7195.
[19] 肖 武,任 河,吕雪娇,等.基于无人机遥感的高潜水位采煤沉陷湿地植被分类 [J]. 农业机械学报, 2019,50(2):177-186. Xiao W, Ren H, Lu X J, et al. Vegetation classification of subsided wetlands in coal mining at high phreatic level based on remote sensing by drones [J]. Transactions of the Chinese Society of Agricultural Machinery, 2019,50(2):177-186.
[20] 娄佩卿,陈晓雨,王疏桐,等.基于无人机影像的喀斯特农耕区地物识别——以桂林市为例 [J]. 国土资源遥感, 2020,32(1):216-223. Lou P Q, Chen X Y, Wang S T, et al. Feature recognition in karst farming areas based on UAV images: Taking Guilin as an example [J]. Remote Sensing for Land and Resources, 2020,32(1):216-223.
[21] 刘 舒,朱 航.基于超高空间分辩率无人机影像的面向对象土地利用分类方法 [J]. 农业工程学报, 2020,36(2):87-94. Liu S, Zhu H. Object-oriented land use classification method based on ultra-high spatial resolution UAV images [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020,36(2):87-94.
[22] 耿仁方,付波霖,蔡江涛,等.基于无人机影像和面向对象随机森林算法的岩溶湿地植被识别方法研究 [J]. 地球信息科学学报, 2019, 21(8):1295-1306. Geng R F, Fu B L, Cai J T, et al. Research on karst wetland vegetation identification method based on UAV image and object-oriented random forest algorithm [J]. Journal of Geo-Information Science, 2019,21(8):1295 1306.
[23] 朱宝光,董树斌,朱丽萍,等.洪河国家级自然保护区湿地功能区保育与湿地补偿研究 [J]. 湿地科学与管理, 2006,(3):25-28. Zhu B G, Dong S B, Zhu L P, et al. Research on wetland function area conservation and wetland compensation in Honghe National Nature Reserve [J]. Wetland Science and Management, 2006,(3):25-28.
[24] Dragut L, Tiede D, Levick S R. ESP: a tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data [J]. International Journal of Geographical Information Science, 2010,24(6): 859-871.
[25] Dronova I. Object-based image analysis in wetland research: A review [J]. Remote Sensing, 2015,7(5):6380-6413.
[26] 魏鹏飞,徐新刚,李中元,等.基于无人机多光谱影像的夏玉米叶片氮含量遥感估测 [J]. 农业工程学报, 2019,35(8):126-133,335. Wei P F, Xu X G, Li Z Y, et al. Remote sensing estimation of nitrogen content in summer maize leaves based on UAV multispectral images [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019,35(8):126-133,335.
[27] Villoslada M, Bergamo T F, Ward R D, et al. Fine scale plant community assessment in coastal meadows using UAV based multispectral data [J]. Ecological Indicators, 2020,111:105979.
[28] Suo C, McGovern E, Gilmer A. Coastal dune vegetation mapping using a multispectral sensor mounted on an UAS [J]. Remote Sensing, 2019,11(15):1814.
[29] Breiman L. Random forests [J]. Machine learning, 2001,45(1):5-32.
[30] Phiri D, Morgenroth J, Xu C. Four decades of land cover and forest connectivity study in Zambia—An object-based image analysis approach [J]. International Journal of Applied Earth Observation and Geoinformation, 2019,79:97-109.
[31] Nguyen U, Glenn E P, Dang T D, et al. Mapping vegetation types in semi-arid riparian regions using random forest and object-based image approach: A case study of the Colorado River Ecosystem, Grand Canyon, Arizona [J]. Ecological Informatics, 2019,50:43-50.
Classification method of swamp vegetation using UAV multispectral data.
ZUO Ping-ping, FU Bo-lin*, LAN Fei-wu, XIE Shu-yu, HE Hong-chang, FAN Dong-lin, LOU Pei-qing
(School of Surveying and Mapping and Geographic Information, Guilin University of Technology, Guilin 541006, China)., 2021,41(5):2399~2410
This paper established machine learning models to classify swamp vegetation communities based on high-resolution UAV multispectral images. In Honghe National Nature Reserve, typical sample areas were selected in the core area, buffer zone and experimental area and ortho-images of these areas were acquired using low-altitude UAVs with RGB and multispectral cameras. Multidimensional datasets were then derived from multiresolution segmentation of ortho-images, and established four classification scenarios. The object-based random forest (RF) algorithm was used to classify vegetation communities after feature selection and parameters (mtry and ntree) optimization and tuning. This algorithm also could rank the importance of each feature in multidimensional datasets and eliminat data redundancy accordingly. The results showed that: The optimized object-based RF algorithm had a high recognition ability for swamp vegetation. The scenario 4 (combination of spectral bands, texture features, geometric features, location features, surface elevation information and vegetation indexes) in the core area obtained the highest overall accuracy (87.12%), and the kappa value was 0.850 at the 95% confidence interval, which was 12.27% higher than scenario 2 (combining spectral bands, geometric features and location features), and the kappa value improved 0.140; For an identification accuracy of typical swamp vegetation, the classification of the reed achieved the highest user’s accuracy of above 88%, and its producer’s accuracy was higher than 90%. The classification ofalso achieved over 85% of producer’s accuracy, but its user’s accuracy (78%) was lower in the core area. This method can be used as an effective method to identify swamp vegetation communities and provide more accurate data support for studying dynamic changes of wetland ecological environment.
UAV multi-spectral data;random forest algorithm;multidimensional data set;variable selection;parameter tuning
X171
A
1000-6923(2021)05-2399-12
左萍萍(1996-),女,河南信阳人,桂林理工大学硕士研究生,主要从事无人机湿地遥感.
2020-09-30
国家自然科学基金资助项目(41801071);广西自然科学基金资助项目(2018GXNSFBA281015);广西科技计划项目(桂科AD20159037);广西研究生教育创新计划项目(RD2000000741、YCSW2021210);桂林理工大学科研启动基金资助项目(GUTQDJJ2017096);广西八桂学者团队项目联合资助
* 责任作者, 副教授, fbl2012@126.com