高精度超声波测距方法的研究
2021-05-26罗前刚张远征
刘 芬,罗前刚,张远征
(1.中煤科工集团重庆研究院有限公司,重庆400039;2.瓦斯灾害监控与应急技术国家重点实验室,重庆400039)
国有重特大煤矿井下的设备、人员、物质运输基本依靠无轨胶轮车实现运输,无轨胶轮车分为矿用重型特种车辆和矿用轻型车辆,其中,矿用重型特种车辆因结构和使用用途的特殊性,驾驶舱多数为敞开式,由于车辆外型庞大,导致驾驶人员操控视野不佳、车辆不易调向的问题;矿用轻型车辆均采用封闭式驾驶舱,由于车辆常常往返于井上井下,驾驶舱玻璃易受水汽影响,对驾驶人员驾驶视野造成影响[1]。同时,煤矿井下光线不理想,车辆在行驶、车辆调向过程中由于驾驶员视野不佳、光线昏暗、巷道狭窄等因素经常会发生车辆碰撞事故。近几年,随着家用汽车自动辅助驾驶技术的飞速发展,自动泊车等相关技术也越来越成熟,泊车辅助的关键是准确判断车身与周围环境的实时距离,需要在车身安装测距传感器识别障碍物和实时测量位置。其中,超声波雷达在自动泊车系统使用广泛,具有成本低、安装方便、指向性强、能量衰减比较慢等特点,采用超声波雷达进行障碍物实时测距,对提高车辆对环境的感知能力,提高矿用车辆防碰撞应用具有十分重要的意义[2]。
在实际应用中,超声波测距受环境温度影响较大,同时与发波频率、硬件检波电路、驱动方式等密切相关,导致测量误差增大。本文根据传感器硬件特征参数、安装位置、环境温度、驱动逻辑等要素综合,提出一种在矿用车辆防碰撞中超声波雷达自适应的实时测距与感知方法,可得到更准确的位置环境信息。
1 超声波测量原理
采用超声波原理进行障碍物的测距就是测量超声波在超声波探头与被测障碍物之间的飞行时间,其工作原理如下,超声波探头首先向外发射超声波,超声波束探测到被测物体时,超声波束碰撞障碍物表面并反射回超声波回波信号,然后超声波探头接收到超声波回波信号,并实时比对超声波回波信号的接收时刻,最后通过ARM 处理器实时计算超声波发射测量信号到超声波回波信号接收到的时间间隔,从而计算得出当前物体与被测物体之间的距离[3],如图1所示。

图1 超声波测距示意图Fig.1 Schematic diagram of ultrasonic ranging
从示意图可知,超声波的飞行范围为探头与障碍物之间,要获取探头与障碍物之间的距离,需要测量超声波从探头发出到超声波回波信号接收到的时间,再知道当前环境下超声波的传播速度,就可以通过计算公式得出[4],计算公式为

式中:L 为当前物体与被测物体之间的距离;ν 为超声波的飞行速度;t 为超声波渡越时间[4]。
超声波测距的关键在于获取不同工况条件下超声波的飞行速度ν,并准确测量超声波从探头发出到接到回波信号的时间t。飞行速度ν 一般都可以通过查询不同温度条件下超声波声速与温度的对应关系获取,那么渡越时间t 的测量精确度就会影响超声波测距的精确度,显得十分重要。渡越时间的高精度测量比较困难,存在误差是在所难免的,可以通过采用最优化的测量方法将测量误差尽可能降到最低,这是提高超声波测距精度的关键[5]。
2 渡越时间检测方法
2.1 温度对测距精度的影响
声波的定义范畴已经包含了超声波,因此,c 即为音速,音速的公式为

式中:γ 为气体的绝热体积系数(空气为1.4);P 为气体的气压(海平面为1.013×106Pa);ρ0为气体的密度(空气为1.29 kg/m3)[6]。
对于1 mol 的空气,质量为m,体积为V,则密度ρ0应为m/V,故:

对于理想气体,有:

式中:R 为摩尔气体常数;T 为绝对温度,因此:

由于γ,R,m 均为己知常数,故声速c 仅与温度T 有关,若温度不变,则声音在空气中的速率与气压无关[7-8]。
在0 ℃的空气中,C0=331.45 m/s
对于任意温度下,有:

所以,在理想环境条件下,超声波在空气中的传播速度可以表示为[9]

不同温度条件下超声波声速与温度的对应关系,如表1所示。

表1 不同温度条件下超声波飞行速度表Tab.1 Ultrasonic flight speed table under different temperature conditions
然而,在实际应用中,温度会影响超声波换能器的物理特性,导致接收信号的局部形状发生变化。为了验证该现象,把防碰撞传感器置于温度试验箱中加热至23 ℃,将静态发射参考波形与该温度下的测量反射波形进行互相关计算得到超声波渡越时间,两波形的对比效果如图2所示。同理可计算45 ℃下的超声波渡越时间,波形对比效果如图3所示。分别计算两种不同温度下各4 组测量波形的渡越时间和相关性,统计结果记录如表2所示。

图2 23 ℃下互相关效果Fig.2 Cross-correlation effect at 23 ℃

图3 45 ℃下互相关效果Fig.3 Cross-correlation effect at 45 ℃
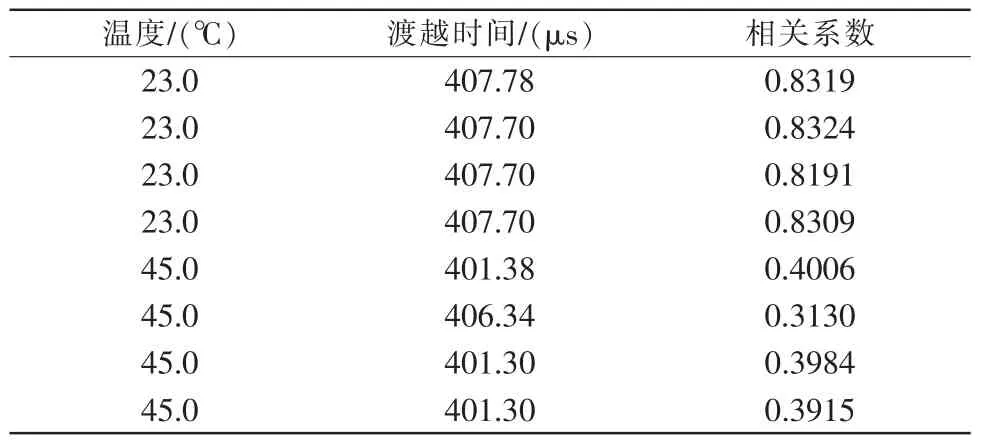
表2 不同温度下互相关结果Tab.2 Cross-correlation results at different temperatures
由图2、图3 可以看出,不同温度条件下测得的测量反射波形具有较大差异,由表2 可以看出,在10 ℃环境条件下选择的静态发射参考波形用于其他温度条件下的互相关计算,随着温度差距增大,相关性会逐渐下降,导致渡越时间测量出现“跳周期”误差。
2.2 动态波形互相关算法
针对静态发射参考波形环境适应能力有限的问题,采用实时动态发射参考波形进行互相关算法改进,具体步骤实施如下:
首先,构建静态发射参考波形,即将防碰撞传感器置于当前工作环境中,采样得到静态发射参考波形,记为x0,并存储该参考波形;其次,接收获取实时测量反射波形,记为x1,将静态发射参考波形x0与实时测量反射波形x1进行互相关计算,得到时间t1,则超声波渡越时间tof1=t1,并在x1中重新选取动态发射参考波形x1′,记录该参考波形的起点时间t1′,计算t1′与t1的差值作为参考波形x1′相对静态参考波形x0的时间偏差,记为Δt1,Δt1=t1′-t1;再次,接收获取实时测量反射波形,记为x2,将参考波形x1′与x2进行互相关计算,得到时间t2,则超声波渡越时间tof2=t2+Δt1,在x2中重新选取该测量波形的参考波形x2′,记录该参考波形的起点时间t2′,计算参考波形x2′相对静态参考波形x0的时间偏差,记为Δt2,Δt2=t2′-t2+Δt1,以此类推,可以实时获取参考波形xn′以及计算超声波渡越时间tofn[10]。
由于超声波渡越时间tofn是根据实时动态参考波形测量所得,因此,超声波渡越时间tofn是超声波发射到回波接收时间,根据式(1)可以计算得到机车与障碍物之间的距离。
3 试验
本文通过以自主研发的超声波测距传感器为试验对象,该传感器由表体、超声波换能器、驱动电路、接收电路、切换控制电路和ARM 处理器构成。其中,超声波换能器安装于表体内,采用交替发射和接收超声波信号;驱动电路由变压器升压驱动电路构成;接收电路由压控电压源二阶带通滤波电路,自动增益控制电路,AD(模数转换)采样电路构成;ARM 处理器用于处理数字信号滤波、互相关运算、时间计算、距离计算及故障诊断等内容。超声波测距传感器系统结构如图4所示,传感头结构示意图如图5所示。

图4 超声波测距传感器系统架构Fig.4 Ultrasonic ranging sensor system architecture

图5 传感头结构示意图Fig.5 Schematic diagram of sensor head structure
为了验证动态参考波形用于互相关算法的有效性,首先在温度试验箱中对超声波测距传感器样机进行了0.5 m 固定距离测试,分别计算得出渡越时间、相关系数和测量误差,结果如表3所示。

表3 互相关结果Tab.3 Cross-correlation results
根据表3 可以看出,在不同温度下动态发射参考波形与实时测量反射波形均具有高度相关性,且温度对超声波渡越时间测量的影响微乎其微,提高了测量的准确性,降低了测量误差。
4 结语
本文分析了超声波渡越时间计算的方法原理和特点,指出了其局限性,提出了基于动态参考波形互相关算法的超声波渡越时间测量方法,可以克服环境因素变化对参考波形稳定性的影响,通过温度试验证明了该方法的可行性,提高了超声波测距的环境适应能力,通过标准距离标定试验验证了测量准确性,采用动态参考波形互相关算法的超声波测距传感器测量误差小于±2 cm,重复性小于±0.2 cm,测量精度较高。
