基于局部特征的点云目标识别
2021-05-20刘启康
刘启康
(1、北京建筑大学 测绘与城市空间信息学院,北京100044 2、北京北建大科技有限公司,北京100044)
1 概述
近年来,目标识别在图像检索、机器人抓取操作、位置识别与定位等众多领域得到广泛的研究。目前,基于图像的物体识别已经有很多研究成果。但是二维图像的成像过程是从三维空间映射到二维空间,这个过程会丢失大量的信息。而目前三维点云数据的获取已经非常快捷,同时三维点云数据的采集不受光照影响,规避了二维图像遇到的光照、姿态等问题,因此基于点云数据的三维物体识别也引起了人们的重视。
目前,已有的三维点云物体识别方法多是通过分析/提取物体的特征点几何属性、形状属性、结构属性或者多种属性的组合等特征进行比对、学习,从而完成物体的识别与分类。根据所利用特征的不同,已有的三维点云物体识别方法可以分为4类:基于局部特征的物体识别方法、基于全局特征的物体识别方法、基于图匹配的物体识别方法以及基于机器学习的物体识别方法。
基于局部特征的物体识别方法主要是通过局部来识别整体[1]。该方法无需对处理数据进行分割,往往通过提取物体的关键点,利用局部特征描述符描述特征点,再通过特征匹配、假设验证等过程完成物体的识别。

图1
其中,特征提取与描述是物体识别中非常关键的一步,它将直接影响到物体识别系统的性能。
本文提出的基于局部特征的点云目标识别方法是通过对模板点云与场景点云建立全局约束条件,通过八叉树体素化方式选取特征点,使用SHOT[2]描述符描述模板特征点与场景点的几何属性,通过特征匹配代价和几何匹配代价建立局部匹配模型,求解局部匹配模型最优解,最后结合全局约束条件和局部匹配模型建立最终匹配模型,以获得最佳匹配目标。
2 识别流程
本方法提出的识别流程如图1 所示。
2.1 全局约束方程
将预处理后的点云数据均匀采样,以提高PCA 计算轴向和特征值的精确度,减少数据采集带来的误差影响,然后利用PCA 计算OBB 包围盒的体积V 以及数据特征值Xi,并建立全局约束方程:

2.2 选取特征点
基于八叉树结构,将模板点与场景点划分为体素大小为V的体素结构,对于每个体素,统计点云数量,计算体素的质心,以最接近质心的点作为特征点。采用此方式选取特征点可以大规模减少点云数量,大大提高点云特征描述时的效率,加快目标物体的匹配速度。
2.3 特征描述
本文选用局部特征描述子描述点云特征,SHOT 描述子是通过计算特征点局部邻域曲面的协方差矩阵特征向量来定义LRF,通过对LRF 重要性的分析,利用加权线性组合算法来计算协方差矩阵与符号异性消除。该方法具有旋转和平移不变性,对噪声和目标相互遮挡等问题具有鲁棒性,描述性较强。
2.4 局部目标函数
局部目标函数由两部分组成:特征匹配代价,几何匹配代价。
特征匹配代价目前常用的几种方法有:求交运算、欧氏距离平方、卡方距离、KL 散度。本文将使用卡方距离来表示特征匹配代价,由于其对噪声的敏感度较低,在高噪声的情况下性能较高的特性,用以描述直方图差异,公式如下:

由于局部目标函数是具有整数约束的非线性目标函数,这样的公式会导致NP 问题,在多项式时间内不能有效解决,因此我们采用取绝对值法将引入辅助变量,将非线性目标函数转化成线性目标函数:

2.5 总体目标函数
最终由全局约束方程和局部约束函数建立总体目标函数:
2.6 求解总体目标函数
目前比较流行的求解线性规划问题的方案有很多,例如:CPLEX、GLPK、Gurobi、LPSolve。本文采用开源、高效、便捷的LPSolve 解决线性规划问题,以获得最终匹配结果。
3 实验结果
本文以地下工井为实验对象,以A7651、A1790、A7622、A7662、A7752 五组不同类型的工井作为模板数据,以十组包含模板类型并存在旋转变换的工井作为场景数据,匹配结果如图2 所示。
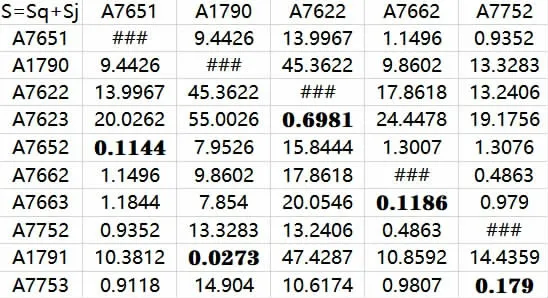
图2
实验数据表明:对于A7651、A1790、A7622、A7662、A7752五种不同类型的工井,可以准确的得到与之相匹配的工井类型A7652、A1791、A7623、A7663、A7753。
