基于ABB 机器人工作站的码垛工艺设计
2021-05-16姚莉娟盛星奎
姚莉娟 盛星奎
(1、苏州高等职业技术学校,江苏 苏州215000 2、苏州长风航空电子有限公司,江苏 苏州215000)
1 概述
随着中国制造2025 的到来,生产过程越来越趋向于智能化和自动化,工业机器人在智能制造各个领域的应用越来越广泛[1],高职院校作为技能人才培养的摇篮更应该紧跟科技发展的步伐,将最先进、最前沿的技术传授给学生以满足社会对于技术人才的需求。本文主要对基于ABB 机器人工作站的码垛工艺进行设计研究,从多角度探讨码垛机器人的发展趋势[2],并从专业需求出发,立足于日常教学,设计应用于不同生产场合的码垛工艺流程。
2 码垛系统概述
工业机器人码垛在工业生产搬运和码垛作业中发挥着越来越重要的作用,担任着提高生产效率、降低成本和解放劳动力的重要角色。在批量小品种多的应用场景,需要码垛工艺适应性强和柔性好,码垛作业贯穿产品加工、包装[2]、储存及运输等的整个生产作业流程中,因此需要码垛工艺适应环境能力强,以满足不同生产过程的需求。基于ABB 机器人工作站的码垛系统如图1 所示。
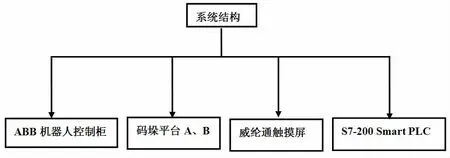
图1 基于ABB 工业机器人工作站的码垛系统结构图
该码垛系统主要包括ABB 机器人控制器、码垛平台A——取垛平台、码垛平台B——放垛平台、西门子S7-200 Smart PLC以及威纶通触摸屏等。根据码垛工艺功能需求,选择相应的组件进行参数设定及程序编辑,实现触摸屏与PLC[3]以及机器人控制柜三者之间的数据传输,首先威纶通触摸屏将数据信息传送给S7-200 Smart PLC,PLC 接收相应数据信息并将其发送给ABB 机器人控制柜,机器人也会将其输出信号传送给PLC,作为其输入信号。
3 码垛工艺设计
3.1 简单功能码垛工艺设计
3.1.1 垛型设计
在一些流程简单、工艺要求较低的生产过程中,码垛工艺[4]要求只需要操作机器人从码垛平台A 固定位置抓取物料然后按照固定样式放置在码垛平台B 上,常用的设计方法有两种,第一是离线编程、第二是在线编程,这两种方法都需要进行在线示教。在线编程是目前实际生产中应用较广的编程方式,它能够根据生产现场需求进行及时调整,具有很强的灵活性,本文主要对在线编程方法进行研究介绍,垛型设计以一字垛和三花垛为例,如图2、图3 所示,图2 为一字垛型,图3 为三花垛型。
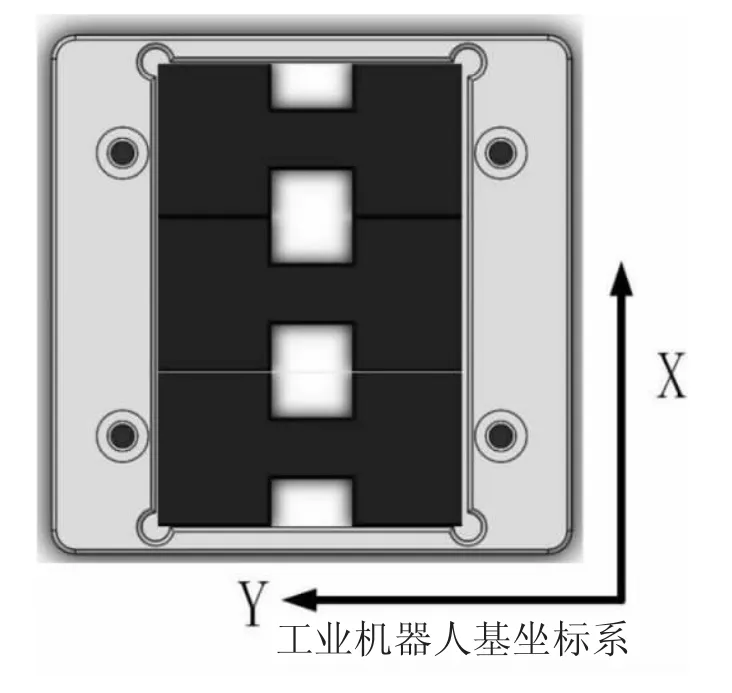
图2 一字垛型
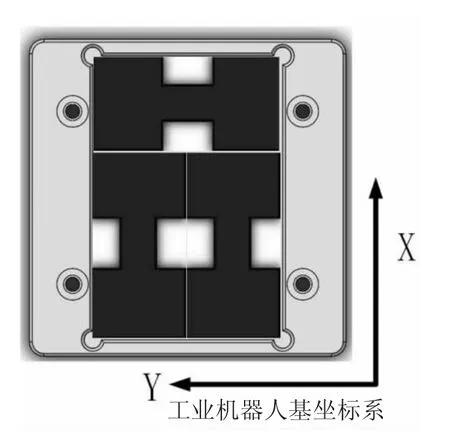
图3 三花垛型
3.1.2 流程设计
一字垛工艺和三花垛工艺任务过程类似,唯一不同是码垛垛型要求,根据不同的生产要求相应的码垛类型,首先开启工作站,启动ABB 工业机器人[5],机器人从设定的原点出发拾取夹爪工具,然后利用夹爪工具从码垛平台A 夹取所需的垛料块按照垛型要求依次放置到码垛平台B 上,完成垛型要求后机器人将夹爪工具放回工具架,机器人回到原点位置等待下一步命令。
3.2 复杂功能码垛工艺设计
复杂功能码垛工艺与简单功能码垛工艺相似,其在简单码垛工艺基础上加入首先加入计时功能模块[4],然后在此基础上添加码垛顺序选项模块,这些功能实现的关键在于工业机器人控制器、触摸屏、PLC 三者之间的通讯[6,7]。
3.2.1 码垛计时功能
码垛计时功能需要设置触摸屏虚拟按钮地址为M12.0,对应的PLC 地址为Q12.0,对应的机器人输入地址为DI_0,触摸屏和PLC 中计时器地址为T10,对应的输入输出信号如表1 所示。
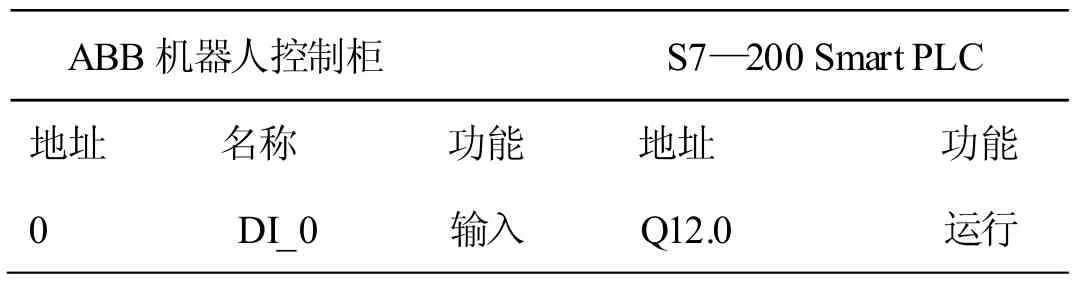
表1 机器人与PLC 对应输入输出信号表
码垛开始前,需按下触摸屏上的运行按钮M12.0 给PLC 发送相应命令,PLC 接收到该命令之后相应输出信号Q12.0 闭合然后将数据传递到机器人控制器使得输入信号DI_0 为1,机器人开始运行,同时计时器T10 开始计时,触摸屏界面显示计时时间,机器人计时停止,最终完成带计时功能的机器人码垛任务流程。
3.2.2 码垛顺序选择功能
在带有码垛计时功能的基础上增加码垛顺序选择功能,在触摸屏中添加项目选单,选择码垛顺序,对应的输入输出信号如表2 所示。
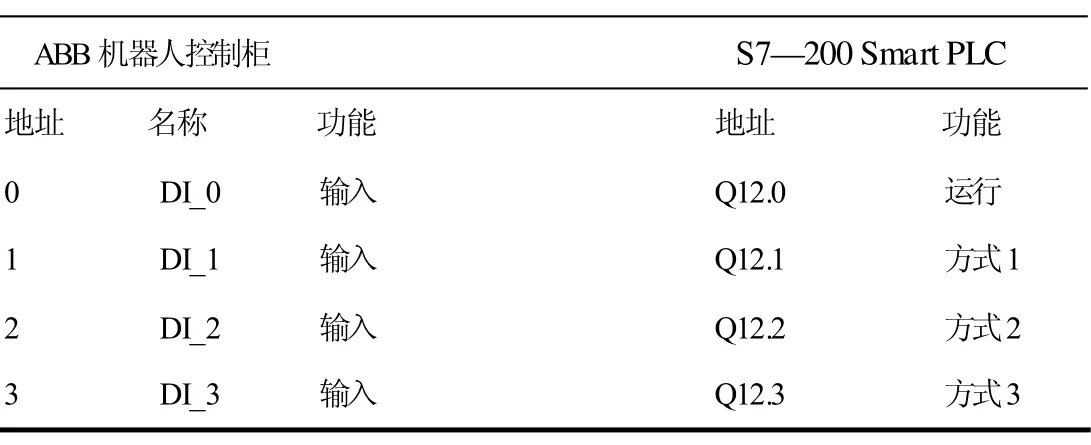
表2 机器人与PLC 对应输入输出信号表
码垛功能画面如图4 所示,包括运行按钮、码垛时间以及码垛方式等功能。
在触摸屏上通过项目选单选择码垛方式,地址VB210 获取相应数值,将其值传递给PLC,Q12.1~Q12.3 对应变量输出,以此确认码垛方式,PLC 将其输出与机器人的输入DI_1~DI_3 相对应,机器人获取垛型信息,然后按下运行按钮,机器人开始执行命令,码垛计时开始,直至完成码垛任务。[8]
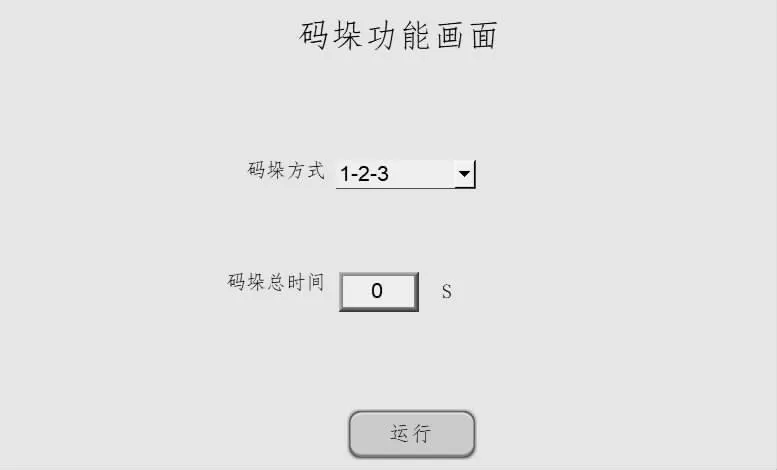
图4 码垛功能画面
4 结论
本文以ABB 机器人工作站基础,通过研究码垛工艺不同的设计方法,即简单功能码垛工艺设计和复杂功能码垛工艺设计,简单功能码垛工艺设计包括垛型及流程设计,复杂功能码垛工艺设计包括码垛计时功能和码垛顺序选择功能,从而能够满足不同生产过程需求,提高码垛工艺的适应性和稳定性,对提高生产效率具有重要意义。
