基于SVM的激光雷达飞机尾涡识别方法
2021-05-06潘卫军吴郑源
王 玄,潘卫军,韩 帅,吴郑源
(中国民用航空飞行学院空中交通管理学院, 四川 广汉 618307)
飞机尾流是飞机升力的产物,它在机翼后方呈现漩涡的形式[1],尾流也被称为飞机尾涡,能够在空中较为稳定的存在一段时间[2]。当后机遭遇尾流时,由于飞机周围空气状态发生变化,气动性能会受到影响,严重时可能会发生滚转、掉高度、失速等情况[3-4]。
对飞机尾流的研究是保障飞行安全的前提,研究飞机尾流的常用方法包括基于计算流体力学 (CFD)的数值模拟、风洞试验和实地探测等方法[5]。Hallock等[6]在英国希思罗机场进行飞机尾流探测实验时,发现大型飞机尾涡消散和小型飞机与在低雷诺数风洞试验中的结果存在差异。Harris等[7]对比风洞试验飞机尾涡数据与雷达实地探测数据,提出了一种用于比较不同数据源的飞机尾涡方法。国内专家学者对尾流也进行了一定研究,牛凤梁等使用W波段雷达对飞机尾涡进行探测和识别,通过建立雨滴受力微分方程,对飞机尾涡的雷达回波的多种特性进行了研究[8-11]。刘俊凯等研究了潮湿大气下的飞机尾涡特性和飞机尾涡提取方法,给出了基于矩阵恒虚警率的飞机尾涡追踪检测方法[12-18]。但是,这些研究没有考虑尾涡探测中实际存在的非均匀风场等因素,导致传统识别模型和实际探测到的飞机尾流数据不能很好的匹配。
本文使用多普勒激光雷达在国内多个机场进行实地探测,前期研究中提出了基于波形相似匹配的尾涡识别方法[19]、基于Alex和基于K最近邻的尾涡识别方法[20-21],波形相似匹配方法和Alex卷积神经网络法对于静风情况下的尾涡有较好的识别效果,但在一定风的影响下,识别效果有限。KNN(K nearest neighbor)方法能够较好识别一定风速下的尾涡,但识别精度有待提升,鉴于此种情况,本文结合激光雷达实地探测的航班尾流数据,提出了一种基于支持向量机(SVM)的飞机尾涡识别方法,对提取特征后的尾涡数据进行识别,并与KNN方法进行对比,确保其有效性和精准性。
1 飞机尾涡探测模型
飞机尾涡是旋转运动,其运动速度方向垂直于飞机尾涡涡心连线,即切向方向,因此也称之为切向速度,用vr表示。切向速度vr的大小和飞机尾涡的强弱密切相关,衡量尾涡强弱的物理量是涡环量,用Γ表示,初始涡环量Γ0和切向速度vt(r)分别表示为:
(1)
(2)
式中:m和B分别表示飞机的质量和翼展;s为常量,其值为π/4;v表示飞机的空速;ρ表示空气密度;g表示重力加速度;r表示尾涡横截面上的点到涡核的距离;rc为涡核半径,通常取值rc=0.052Bs。
激光雷达常用的扫描模式有距离高度指示器(RHI) 和平面位置指示器 (PPI)两种,综合分析两种扫描模式,本文采用RHI模式进行扫描,在实地探测过程中,多普勒激光雷达安放位置如图1所示。

图1 普勒激光雷达安放位置示意图
受限于脉冲多普勒激光雷达探测原理,最后处理出来的数据是离散数据,每个扫描周期得到的径向风场为不同距离门、不同仰角的径向风速集合,用Vr表示,具体为:
Vr={vr(ρi,θj)},i∈[1,n],j∈[1,m]
(3)
式中:ρi表示探测点距离雷达距离;θj表示探测点连线和水平面的夹角,n和m分别代表距离门的数量和不同俯角角度。
2 飞机尾涡特征的提取和处理
2.1 最大速度极差
在对激光雷达探测的径向速度场识别之前,需要对能够表征飞机尾涡的特征进行提取和处理。特征提取是非常最重要的一环,特征提取的效果,直接影响到最后识别的结果,本文考虑最大速度极差和环境因素作为重要特征。
对于激光雷达探测的径向速度场数据,传统的提取径向速度风场的方式为速度极差法,为了体现飞机尾涡存在的正负速度的差异,分别按照不同径向计算速度极差,或按照不同的角度计算速度极差,用Dr(ri)和Da(θj)表示,其计算公式为[22]:
Dr(ri)=max(vr(ri,θj))-min(vr(ri,θj))
∀j∈[1,m]
Da(θj)=max(vr(ri,θj))-min(vr(ri,θj))
∀i∈[1,n]
(4)
式中,n和m分别表示激光雷达距离门的数量和不同扫描仰角的数量。
由于空中的风存在不均匀现象,风场本身不均匀的变化也可能表征在该区域范围内,因此按照式(4)计算出的最大速度极差所表征的区域可能并不代表飞机的尾涡区域。
在实际探测中,对于雷达扫描到的飞机尾涡区域,无论是采用不同径向速度极差或者不同仰角的速度极差,考虑的都只是航空器产生的单个尾涡,考虑到航空器在实际飞行中左右机翼同时生成尾涡,假定左右尾涡之间的间隔为b0(b0=Bs),则航空器左右尾涡产生的矩形区域速度极差,如图2所示。

图2 矩形区域速度极差示意图
在图2中,矩形区域的大小设定为固定值,该矩形区域包括4个大小相同的子矩形,分别表示为左上(UL),左下(LL),右上(UR),右下(LR),定义最大矩形极差Drec(ri,θj)为:
(5)

2.2 其他环境因因素
在激光雷达实地探测过程中,大气环境参数对飞机尾涡的探测有较大影响,本文在民航局气象部门的支持下,获得了探测时段的机场气象数据,经筛选后,选择气温T,气压P,背景风速vwv,背景风向θwd,分别作为表征气象和顺风、逆风、侧风等因素对飞机尾涡影响的特征[22]。
根据上述对尾涡特征的提取,合并环境参数,可得特征向量xi和对应标记yi为:
xi=(Dr,Da,Drec,T,vwv,θwd,P),yi∈{-1,+1}
(6)
式中:i∈[1,N],N表示样本数量;yi=-1表示飞机尾涡不存在,yi=+1表示飞机尾涡存在。特征向量xi中每一个特征向量对应第2节的定义。
提取1 038组激光雷达探测的径向风场数据和对应的环境参数数据,其中523组数据包含飞机尾涡,515组径向风场数据不包含飞机尾涡,从径向风场数据中提取对应的DrDa,和Drec3个特征,提取对应时间的环境数据,温度T,压力P,风速vwv,风向θwd,最后得到的数据集D为[22]:
D={(xi,yi)},i∈[1,N]
(7)
式中,N=1 038表示数据集中特征向量的数量。
合计7类特征,数据集中每个特征的具体范围如表1中所示,表1中依次是所有样本特征的统计值,分别列出了最大值、最小值、均值和标准差,可以看出,不同距离的速度极差和不同角度的速度极差,以及温度标准差较大,说明不同样本之间的差距较大,其余特征不同样本之间的差距较小[22]。

表1 特征值范围
3 基于SVM的尾涡识别方法
3.1 SVM识别模型
本文采用机器学习的方法对飞机尾涡进行识别,它通过寻找超平面对给定的向量进行分类。图3为SVM分类示意图,当特征数为2的时候,根据数据集中样本的二维特征值,将其作为X坐标和Y坐标,绘制在二维平面中,其中实心圆形和空心圆形分别代表不同分类的样本点,对于飞机尾涡识别,即是否存在飞机尾涡,SVM方法在于从其中找出一个直线,能够将两类样本点分离开,对于需要识别的径向风场数据,根据对应的二维特征,判断是落在直线的哪边,从而确定分类结果[22]。

图3 SVM分类示意图
对于具备p个特征的数据,其特征向量为p维向量,SVM计算的是能够将两类样本数据完全分离开来的p-1维超平面,结合式(6)中特征向量的表达式,可得:
w·x+b=0
(8)
对于超平面w·x+b=0,样本点xi到超平面的几何间隔yi表示为:
(9)
对于SVM所求解的超平面是使得间隔值最大的超平面,因此式(9)的问题转化为:
(10)
其中,满足该约束条件成立的特征向量,也被称为支持向量(support vector)。
本文对尾涡的识别可看做是典型的SVM分类问题,因此SVM模型可改进为:
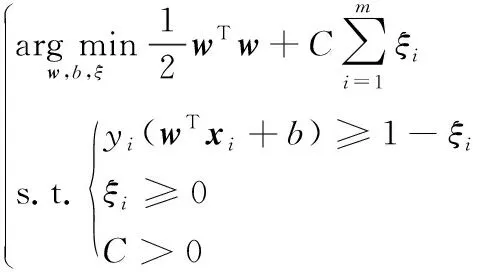
(11)
式中:ξi为松弛变量,每个特征向量都对应了一个松弛变量,代表该组样本不满足约束的程度;C表示惩罚因子,表示部分样本能够允许不完全被超平面完整划分的约束强弱。
SVM通过映射函数φ将特征向量xi映射到高维空间,再寻找最佳超平面。本文定义内核函数为K,若K和φ满足以下关系:
K(xi,xj)=φ(xi)·φ(xj)
(12)
则求解函数的内积能够直接替换成对应的核函数,本文选择引用RBF核函数中的经典高斯核函数,高斯核函数K和其映射函数φ为:
K(xi,xj)=e-γxi-xj||
(13)
φ(xi)=(e-γxi-x1||,e-γxi-x2||,…,e-γxi-xm||)
(14)
式中,γ是RBF核函数的参数,等于1/2σ2。
因此通过高斯核函数后能够将线性不可分的特征向量转换称为线性可分的特征向量,最终SVM的求解模型为:
(15)
该问题为不等式约束的凸二次规划问题,直接求解较为困难。因此对其使用拉格朗日乘子法,转化为对应的对偶问题,式(15)对应的对偶问题为:
(16)
该损失函数和约束条件的形式,能够通过启发式策略的序列最小优化算法解决。
3.2 识别模型参数调节
对RBF核函数,需要设置参数γ,以及惩罚系数C,不同参数最后结果差距较大,本文采用网格搜索的方法,将参数可能的取值按照等比数列的方式进行设置,根据网格搜索的结果,确定一个对于分类器效果更好的参数子空间,通过参数子空间,继续网格搜索,通过重复这个过程,将参数的范围不断搜索,最后确定最佳参数[22]。
在进行初次网格搜索的过程中,首次搜索范围较大,参数取值范围为log2C∈[-5,15],log2γ∈[-15,5],步长为1,此时参数空间为C=2-5,2-4,…,214,215,γ=2-15,2-14,…,24,25,结果如图4(a)所示,横纵坐标表示C和γ的取值,图4中颜色条的色彩越亮,表示搜索性能越好,颜色越差,性能越差,从图中可以看出当log2C=[1,5],log2γ=[-5,-1]时,图4中颜色相对其他区域更亮,性能优于其他参数空间,对应的C=8,γ=0.125时,此时分类器交叉验证的平均得分最高,为0.880。
继续缩小参数范围,取log2C∈[1,5],log2γ∈[-5,-1],步长调整为0.25,此时参数空间范围为C=2-1,2-0.75,…,24.75,25和γ=2-5,2-4.75,…,20.75,21,进行第二次搜索,搜索结果如图4(b)所示,当参数空间范围进一步缩小至log2C∈[1.75,3.75],log2γ∈[-3.75,-2.25],此时分类器性能最佳的参数组合还是C=8,γ=0.125。重复该过程,迭代第4次,精度为0.1时,得到了参数为C=7.464,γ=0.125,继续搜索,颜色不会发生明显变化,且参数值固定为C=7.464,γ=0.125,因此该参数下分类器平均性能最佳,验证集平均性能为0.882,对应的支持向量数330,为最终得到模型。

图4 网格搜索性能图
4 实例验证及模型评估
通过网格搜索调整参数后会得到一个新的SVM分类器,本文对模型的泛化特性进行验证,通过3.2节分析将参数设置为C=7.464,γ=0.125,对785组训练集样本训练后,得到对应的分类器,对测试集中253组样本进行分类,识别的结果如表2所示。
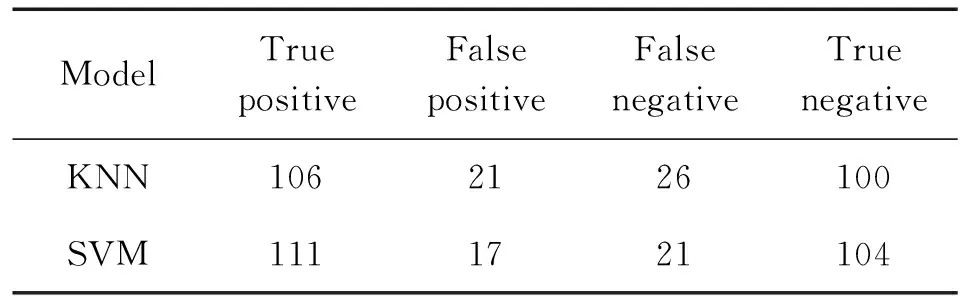
表2 测试集识别结果
表2中最后分类的样本,是通过混淆矩阵的方式呈现出来,并与基于相同训练集训练后的k最近邻(KNN)的方法对比。从识别的结果来看,SVM无论是对于存在尾涡的风场和不存在尾涡的风场,正确识别的数量都比KNN更多[22]。
根据混淆矩阵中的正负样本的分类情况,分别定义准确率(ACC)、正预测值 (PPV)、真正率 ( TPR) 、召回率Recall、 F1-Score 作为对识别性能的评估指标。其中PPV表示实际存在的尾涡占识别存在的尾涡的比率,TPR表示所有存在尾涡数据中成功识别的比率,Recall表示相关数据样本里,成功识别尾涡的比例。考虑实际应用PPV和TPR有时差距过大,需额外纳入F1-Score来综合评估SVM模型的分类性能,根据模型识别结果计算的性能如表3所示。SVM 的方法较KNN的方法无论是准确率、精准率,召回率都更高。

表3 测试集识别结果
由于两种方法的验证均是基于测试集样本的识别情况,识别的数据仅能说明对于该数据集有效,因此引入了受试者工作曲线 (receiver operation characteristic curve,ROC)来评价模型的泛化性能。机器学习的方法性能很大程度上会受到样本数据的限制,当样本数据发生较大变化时,性能也会相应的变化,但是ROC曲线往往能够保持不变,ROC曲线下的面积(area under curve,AUC)越大,也就说明模型的泛化性能相对更好,面对未知的样本,也能保证一定的性能[22]。图5(a) 和图5(b)分别为 KNN 和 SVM 的 ROC 曲线,AUC 分别为0.906和0.920,远远大于随机分类器的AUC值0.5,因此两者对于飞机尾涡的识别具备良好的鲁棒性。

图5 模型ROC曲线
为更进一步说明模型的效果,使用激光雷达实地探测数据进行测试,识别效果如图6所示。

图6 尾涡实测识别效果
图6中左上角表示的是尾涡存在的概率值,通过3.2节训练好的模型,可得出SVM模型中的最佳超平面,根据最佳超平面的划分方法以及提取的径向风场数据特征,可确定数据样本是否存在尾涡,然后通过仿真SVM中的拟合sigmoid模型,最终得到该样本尾涡存在的概率。图6从上至下分别为静风无尾涡、静风有尾涡、背景风干扰有尾涡和静风不明显尾涡,识别尾涡存在的概率分别为7%、96%、83%和92%,给出正负样本的判断有足够的差别,均能够正确识别,对本文中提到的影响尾涡识别的场景具备较好的抵抗性。
5 结论
本文将径向风场中的尾涡的识别问题,抽象成机器学习中的二分类问题,提出了考虑不同环境因素下的基于SVM的飞机尾涡识别方法。该方法提取尾涡的速尾度极差特征,并结合温度、气压、风速、风向这四种环境因素,建立对应的特征向量和目标函数。在上述基础上,通过网格搜索和交叉验证的方法训练模型,确定模型的最佳参数,得到最佳超平面,通过测试集验证了训练模型的优良性,识别飞机尾涡的平均性能达到0.85以上,AUC超过0.9,具备一定的泛化性能,同时SVM方法在与KNN的飞机尾涡识别方法对比过程中,表现出更优的识别性能,结合项目组实际探测的雷达数据进行模型验证,验证结果显示在静风环境或者有一定背景风场存在的情况下,SVM方法能够有效识别具备明显特征和不明显特征的飞机尾涡。
