基于SOLIDWORKS 与ADAMS 的自动贴标机构仿真及优化设计
2021-04-30陆武慧
陆武慧,赵 哲
(1.西安航空职业技术学院通用航空学院,陕西西安 710089;2.陕西科技大学 机电工程学院,陕西西安 710021)
贴标机是将标签或商标贴在产品上的一种常见的设备,是现代包装不可缺少的组成部分。产品走向市场前,必须经过包装、贴标和打码等环节才能装箱入库。主要适用于在线路板、汽车精密部件、纸盒、杂志、手机电池、医药、日化等小尺寸平面物料上进行高精度准确贴标的理想设备,使产品标识更美观。魏会芳等利用机器人机构完成对热卷钢材顶面和侧面的标记[1]。张付祥等提出了3T2R 混联机构,对其进行了运动学分析及工作空间研究[2]。
贴标机是包装或者运输生产线上重要的一个环节设备,且结构比较复杂。贴标机构是保证贴标效果及效率的关键部分,根据贴标的具体工作要求,贴标机构应该具有足够的速度以及一定的工作能力[3-4]。文中提出的贴标机构的基本机构是五杆机构,具有传递路径短、结构简单紧凑、容易制造生产等优点。随着自动化生产技术的日益发展,贴标机在自动化生产线上具有非常广泛的应用,贴标机技术从手工贴标、半自动贴标到自动贴标,发生了巨大的变化。文中对贴标机的机构设计与建模仿真进行了分析,为实际物理样机的生产提供了依据,对其进一步优化设计和提高生产效率提供了参数支持[5-8]。
1 贴标机的机构分析
如图1 所示的贴标机的机构包括曲柄、连杆、后摇杆、贴标杆、前摇杆、标签和标签盒。当曲柄1 转动时,带动连杆2、后摇杆3、贴标杆4 和前摇杆5 转动,后摇杆3 和前摇杆5 固结在地面上,通过连杆机构驱动贴标杆4 在标签盒7 前方的标签6 处吸取标签,之后,通过贴标杆4 的运动粘贴到自动化生产线批量生产的产品上,然后往复运动,实现贴标动作。自动贴标机的机构本质上可简化为连杆机构,贴标机的机构运动简图如图1 所示。

图1 贴标机的机构简图

且杆3 和杆5 满足θ5=θ3-π。
将闭环矢量方程写成三角函数形式,并消去θ5,得到位置方程:

方程组中θ1为初始条件给定值,θ2、θ3、θ4、θ6为未知量。该方程组为非线性超越方程组,可以先利用作图法给出各角度的估计值,再利用牛顿-辛普森方法迭代求得各杆角度的数值解。
位置方程对时间求导,得到速度方程:

速度方程对时间求导,得到加速度方程:

由图中矢量关系可知,贴标点H的位置方程如下:

对贴标点H的位置方程求导,得到贴标点H的速度方程如下:

对贴标点H的速度方程求导,得到贴标点H的加速度方程如下:
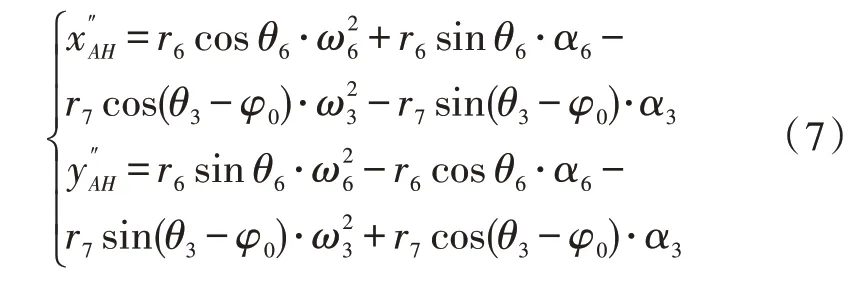
由此可以求得贴标点H的位置、速度、加速度特性。
2 仿真模型建立
2.1 贴标机的机构建模
当前,虚拟样机技术广泛应用于机械制造、设计研发等多个领域,它充分借助计算机软件,建立产品和设备的三维实体模型,在三维模型的基础上,完成运动学和动力学模型的仿真模拟,为产品的设计、研发和制造提供基础和依据。通过在计算机软件上建立虚拟样机,对其动力学模型进行仿真计算、分析和优化,用仿真的方式创新了传统实际样机的试验环节[9-10]。
ADAMS 是一种可实现三维建模及运动仿真的虚拟样机软件,用户可以对所研究机构进行运动学和动力学仿真,可以确定部件在对应时间下的位移、速度和加速度等参数。同时,通过动力学模型,可以仿真计算出各构件的力、力矩等涉及到的参数[11-12]。
产品三维建模是进行运动学和动力学仿真模拟的前提,三维模型的建立也为导入到动力学仿真软件提供了依据。根据贴标机构的结构特点,其简化模型包括曲柄、连杆、前后摇杆、贴标杆、标签盒等尺寸信息。在SOLIDWORKS 软件中对贴标机的机构进行三维建模,建立自动化传送带,并在传送带上均匀布置建模需要贴标的批量产品,完成贴标机的机构建模。
2.2 贴标机动力学仿真模型建立
动力学仿真软件ADAMS,不仅可以作为机械系统进行运动学和动力学仿真分析的工具,而且它具备多种接口,可以作为虚拟样机的开发工具,适合多种开放性程序类型,为产品和设备样机的二次开发提供平台和基础[12-13]。
利用SOLIDWORKS 软件强大的三维建模功能,在该软件中建立好实体模型,导出ADAMS 软件能够读取的parasolid 格式,在动力学软件ADAMS 中导入该格式的贴标机三维模型,检查当前软件中模型相应的参数设置,修改零件名称、材料和颜色等。然后,对其添加运动副和驱动,从而建立贴标机的动力学模型,为其进行运动分析和轨迹判断打好基础。在贴标机三维模型建立的基础上,添加各项运动副信息。
添加约束如下:1)7 个旋转副:在电机与贴标机曲柄之间建立旋转副约束,使贴标机曲柄能够随着电机的转动而旋转;贴标机曲柄和连杆之间建立旋转副约束,形成铰链;贴标机连杆和贴标杆之间建立旋转副,形成铰链约束;后摇杆与贴标杆之间建立旋转副,形成铰链约束;前摇杆与贴标杆之间建立旋转副,形成铰链。前摇杆和后摇杆各自的转动形成两个旋转副;2)给传送带上设置移动副,当添加移动速度后,被贴标的物品将随着传送带移动到贴标的位置;3)传送带上物品与传送带之间建立固定副约束[14-16]。
设置初始条件,定义曲柄驱动和传送带移动速度等参数,从而建立起贴标机的动力学模型,如图2所示[17-18]。
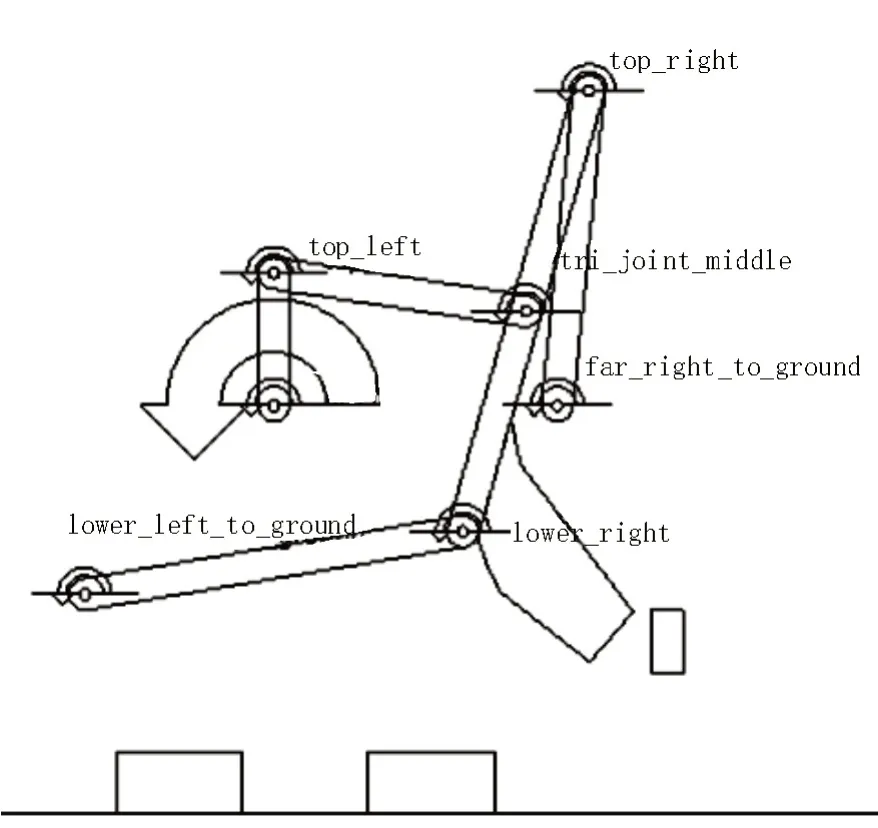
图2 贴标机构的动力学模型
3 模型仿真分析
3.1 验证机构合理性
根据贴标机的机构实际运动过程,设置仿真时间为3 s,步数为1 000 步,对贴标机的机构进行运动学仿真计算,在贴标杆末端设置一个测量标记点,在ADAMS 仿真模型中,该点命名为trace_point,位于贴标杆末端位置,通过运动仿真模拟,从而得到贴标机中贴标杆末端的位移曲线。
以贴标机中贴标杆的末端为研究点,贴标机的位移曲线光滑、平稳,具有周期性,如图3 所示。贴标杆在标签盒粘贴过程中存在位移的小幅变动,运行过程平稳、无死点,验证了贴标机采用该连杆机构的合理性。
3.2 曲柄长度对贴标特性的影响
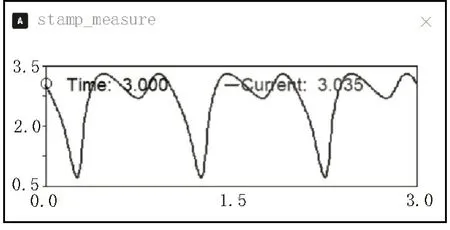
图3 贴标杆末端位移图
贴标机构是自动贴标机中的重要组成部分,其中贴标高度将影响到贴标的效果和准确性,为了探索曲柄长度对贴标高度的影响,选择曲柄长度为10.2 cm、10.275 cm、10.35 cm、10.425 cm、10.5 cm 的5 种情况,对曲柄长度进行参数化设计,如图4 所示,对其进行运动学仿真分析,得到在5 种不同曲柄长度情况下的贴标杆末端高度结果和运动仿真模拟,如图5、图6 所示。
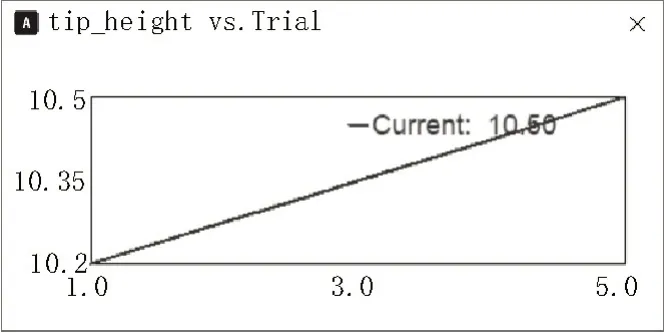
图4 曲柄长度参数化取值
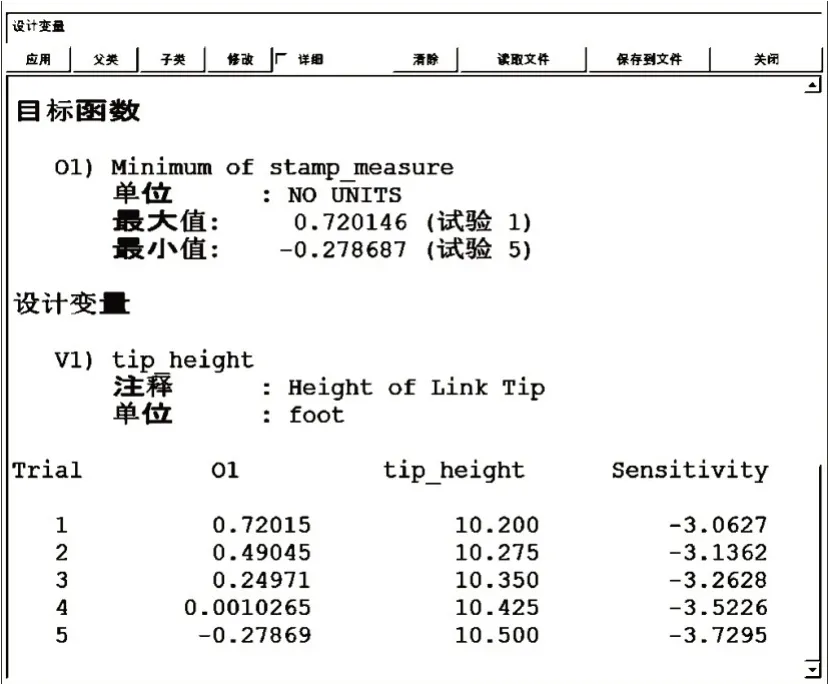
图5 不同曲柄长度贴标高度结果
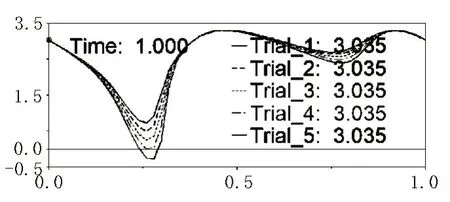
图6 变曲柄长度的贴标杆末端运动仿真
通过对比发现,当曲柄长度不同时,贴标机的贴标高度也随之不同。当曲柄长度为10.425 cm 时,贴标杆末端与贴标物体表面刚好重合,且误差最小,较好地完成了贴标动作;当曲柄长度为10.2 cm、10.275 cm、10.35 cm 这3 种情况时,贴标杆的末端与被贴标物体表面间存在距离,会出现不能成功贴标的情况;当曲柄长度为10.5 cm 时,会出现贴标杆末端与被贴标物体挤压的情况,可能会导致标签出现损伤的情况。
因此,对贴标机构的曲柄长度进行优化设计,让贴标杆末端与被贴标物体成功贴合,完成贴标动作,符合工程实际情况,说明仿真的正确性。
4 结论
通过借助SOLIDWORKS 软件的建模功能,建立贴标机的机构三维模型,导出成parasolid 格式,将导出格式的模型导入到动力学软件ADAMS 中建立贴标机的机构动力学仿真模型,并得出了自动贴标机中贴标杆末端的位移曲线,符合工程实际情况,验证了贴标机构的合理性,并得出了不同曲柄长度下,贴标杆末端高度结果和运动仿真模拟曲线。仿真结果表明:该五杆机构在贴标过程中,无运动干涉现象,模型准确,可应用于实际中,并探索了曲柄长度对贴标性能的影响,有助于提高产品设计的准确性,为后续的优化设计、有限元分析以及实际的物理样机生产提供了依据。
