滩涂水边线Landsat-5 影像提取方法−以长江口崇明东滩为例
2021-04-29杨立君张荣春姜杰苗立志施佳凤
杨立君,张荣春,姜杰,苗立志,施佳凤
(1.南京邮电大学 地理与生物信息学院,江苏 南京 210023;2.南京师范大学 地理科学学院,江苏 南京 210023)
1 引言
水边线(也称水涯线)是指潮汐波动下海平面与陆地在时空尺度上形成的瞬时交界线,是遥感影像上重要的特征线[1]。自动获取遥感影像上的水边线时空变化信息,对于掌握海岸带动态变化、研究陆海相互作用机制、海岸带资源保护与开发及近海工程管理等研究具有重要意义[2-4]。从遥感影像上获取水边线的自动化方法一般可分为边缘检测方法、阈值分割方法及影像分类方法。边缘检测强调的是不连续性,认为边界附近或是边界上存在剧烈改变,使用差分法或者其他数学变化方法(例如小波变换)查找灰度值发生剧烈变化的位置。阈值分割方法和影像分类方法强调的是相似性,认为边界线位于两个相对稳定的区域之间,区域内属性特征相似,但区域之间具有不同的属性值,也就是说两区域存在空间距离[3-5]。边缘检测方法实施起来比影像分割方法相对简单。然而,边缘检测方法检测出来的边缘像素不连续,不能完整地描述水边线。相比较,分割算法及分类算法对于创建连续边界具有一定的优势,但对于边界像素的识别需要较多的处理步骤。
近年来,国内外学者对影像分割、边缘检测及影像分类等方法开展了大量的研究工作,对于水边线的自动提取大家一致认为应该综合使用多种处理方法[2]。Mason 等[6]、郑宗生等[7]提出了波段组合方法增强海陆对比度,并应用阈值分割方法提取了潮间带水边线。Niedermeier 等[8]和Li 等[9]应用小波变化方法检测了SAR 图像上的河口水边线。Liu 和Jezek[5]和盛佳等[10]使用Canny 边缘检测方法提取了格陵兰岛海岸水边线。刘炜等[11]和Zhang 等[12]研究了面向对象分类提取遥感影像水边线的方法。欧阳越和种劲松[13]、郭海涛等[14]和Zhu 等[15]基于水平集边缘检测方法提取了SAR 图像海岸带水边线。Kang 等[16]和郑宗生等[17]又提出了基于水动力模型提取遥感影像水边线的方法。上述遥感影像水边线提取研究主要集中在沙滩或者清澈水体,干沙和海水反射率差别很大的地区,提取的水边线属于强水边线,水边线提取效果较好。但是,在滩涂潮间带光谱特征受到粒径大小、土壤含水量、局部坡度、海水的浑浊度及存在的潮汐、溪流等多种因素的影响,在遥感影像上陆地与水体区域之间缺乏一致的、充分的对比强度,属于弱水边线,上述水边线提取方法效果并不理想。特别是大潮低潮期落潮条件下的水边线遥感提取最为困难。
充分利用各种水边线提取方法的优点,是解决弱水边线有效提取的重要途径[18-19]。本文综合运用影像增强技术、影像分割技术及边缘检测技术在Lansat-5遥感影像上提取不同平面精度及连续性的水边线对象,将边缘信息作为线元对象,提出了空间关系结合光谱特征的滩涂水边线遥感测量方法。此方法应用IDL 程序设计语言编程实现,水边线提取自动化程度较高,能够有效提取Landsat-5 影像水边线,是具有一定推广能力的水边线提取方法。
2 研究区与数据
2.1 研究区
研究区位于长江口崇明岛最东端,称为崇明东滩,如图1 中白色框所指的地区。崇明岛由长江南支和长江北支两条水道的径流以及涨落潮流所挟带的泥沙逐渐沉积而成[20],位于31°27′00″~31°5l′15″N,121°09′30″~121°54′00″E,其南北狭、东西宽,滩涂内潮沟密布,高、中、低潮滩分带十分明显。崇明东滩南北最宽处约为18 km,东西最宽处约为25 km,在海堤外呈半椭圆形分布,滩面宽阔、坡度平缓,坡面常驻留大量水体,常作为弱水边线遥感提取的研究对象。

图1 研究区Fig.1 Study Area
2.2 数据集
Landsat-5 影 像提供了1984−2013 年的对 地观测数据、图幅较宽、具有适中的空间与光谱分辨率,同时还能够免费下载。基于上述特点,国内外长时间、大范围的海岸线变化的研究,都采用Landsat-5 影像作为数据源。因此,本文选择Landsat-5 影像,开展中等尺度下遥感影像水边线提取方法研究具有重要的意义。Landsat-5 影像由7 个波段组成。band 1~3 为可见光波段,band 4 为近红外波段,band 5、band 7 为两个中红外波段,空间分辨率均为30 m。band 6 为热红外波段,空间分辨率为120 m。
本文使用的Landsat-5 影像数据集,来自于GEE数据库,是美国地质勘探局(USGS)Landsat 数据一级大气校正反射率(TOA)遥感数据产品。卫星影像成像时间为2007 年4 月20 日。成像时刻微风无云、空气质量好、可见度高,处于大潮低潮期(落潮)。在滩涂水边线遥感提取最难的条件下,开展Landsat-5 影像水边线提取方法研究。
对遥感影像预处理依次进行了影像裁剪、大气校正、几何纠正及影像增强。使用FLAASH 模块进行大气校正,选用NLAPS(National Land Archive Production System)处理产品的对应定标参数完成辐射定标[21],大气模型选择中纬度夏季,气溶胶模型选择海洋模型(海洋模型保证了所有像素DN 值为正)。在堤坝拐角及农田边界上选取11 个特征点作为几何纠正点,对应的地面控制点坐标在1∶1 万的数字地形图上提取,采用一次多项式纠正模型,双线性内插方法进行影像几何纠正,几何纠正精度为0.43 个像元。
3 研究方法
本文方法的基本策略是借助band 6 提取的概略水边线计算其他波段提取边线的空间特征,并在空间关系与光谱特征的共同约束下,完成水边的识别与连接。主要由以下步骤组成:
步骤1:影像预处理。影像预处理工作除了大气校正、几何纠正以外,还需要进行降噪处理和海陆对比度增强。
步骤2:“低精度”水边线提取。应用阈值分割法提取band 6 水边线。由于band 6 的空间分辨率为120 m,这里提取的水边线称之为“低精度”水边线。
步骤3:“高精度”边缘检测。Canny 算子检测增强后遥感影像边缘。海陆对比度增强是对除band 6以外其他波段的操作,增强后的遥感影像空间分辨率为30 m。因此,从增强后遥感影像上提取的边缘称之为“高精度”边缘,对应的水边线称之为“高精度”水边线。
步骤4:线元对象属性计算。将“高精度”边缘作为线元对象,依据“低精度”水边线计算线元对象属性。线元对象属性主要包括空间特征与光谱特征。
步骤5:“高精度”水边线识别。依据水边线固有的空间特征和光谱特征规律,建立水边线知识规则,决策树分类方法识别“高精度”水边线。
步骤6:水边线的连接与质量评价。借助“低精度”水边线完成“高精度”水边线的连接。对于最后的水边线从平面位置精度与水平性两方面进行评价。
滩涂水边线Landsat-5 影像提取方法共有6 个主要步骤组成,主要包括以下5 个方法。
3.1 基于最大类间方差法的band 6 影像分割方法
阈值分割法是高效的水边线提取方法,提取的水边线连续、平滑,但是定位精度差,并且对水陆对比度要求较高[19]。band 6 波段对温度敏感,提取的水边线空间分辩率不高,但却蕴含着大量的空间信息[22]。对于整幅影像使用全局阈值区分水体和陆地,由于海岸带地区海陆对比度的不均匀性,一些局部的水边线将不能被识别,会引起弱水边线处的不连续性。为有效提取弱水边线,我们依据局部海陆分割效果最优,动态设定分割阈值。
将整幅影像分成若干组小范围的,相互重叠的区域。使用最大类间方差法(大津算法)确定局部最佳阈值。最大类间方差法利用类别方差作为判据,选取使类间方差最大和类内方差最小的图像灰度值作为最佳阈值。设T为前景与背景的分割阈值,前景点数占图像比例为w0,平均灰度值为u0;背景点数占图像比例为w1,平均灰度为u1,图像的总平均灰度为u,前景和背景图像的方差,则有


使用循环遍历方法计算方差 σ2,当方差最大时,可以认为前景和背景差异最大,此时的灰度T是最佳阈值。
3.2 基于最大类间方差法的Canny 边缘检测方法
Canny 算子定义的定位准则、信噪比准则及单边响应准则是迄今为止定义最为严格的边缘检测标准。该方法原理简单、边缘检测质量高,现已成为评价其他边缘提取算法的标准[23]。阈值设定是Canny算子边缘提取的关键,传统Canny 算子全局设置高低阈值。滩涂地带的遥感图像易受光照、场景等不确定因素的影响,整幅图像高低阈值比例不可能是一个固定的值[24]。将整个图像分成若干相互重叠的小区域,在每个小区域中基于大津算法的思想自动选取高低阈值,实现Canny 算子检测边缘信息。
设非抑制边缘图像中的像素划分为D1、D2、D33 个类别。其中,D1包含梯度幅值为{g1,g2,···,gk}的像素,代表着原图中的非边缘点。D2包含梯度幅值为{gk+1,gk+2,···,gm}的像素,代表着原图中有可能是边缘的点。D3包含梯 度幅值为{gm+1,gm+2,···,gl}的像 素,代 表着原图中的边缘点。设一个小区域图像的梯度平均值为E;该小区域非抑制边缘图像D1、D2、D33 个类别对应的平均梯度值分别为e1、e2、e3;D1、D2、D33 个类别占小区域图像的比例分别为p1、p2、p3;参考大津法则可以定义评价函数:

式中,e1、e2、e3、p1、p2、p3都可以用抑制图像中的高低阈值来表示,梯度等级可以人为确定(一般定位64级)。因此,公式(3)是关于梯度高低阈值的二元函数,σ2描述了类间方差。类间方差最大在数理统计意义上是类间分离性最好的依据之一。因此,应用循环遍历的方法计算 σ2。当 σ2最大值时对应的两个梯度值即为D1、D2、D33 个类别的分界值,也就是Canny算子的高低阈值。
3.3 线元对象属性计算方法
线元对象属性主要包括空间特征和光谱特征。
3.3.1 空间特征计算方法

线元对象的空间特征主要考虑了空间位置、长度、形状、方向以及拓扑关系。边线空间位置用边线到“低精度”水边线的平均距离表示。边线的长度用像素的个数L来表示。形状是用线元对象与“低精度”水边线相邻部分的相似程度表示,用下式来计算:式中,n表示“高精度”线元对象的长度;d表示“高精度”线元对象到“低精度”水边线最短距离的平均值;di示第i个像元到“低精度”水边线的最短距离;σ2表示“高精度”线元对象每个像元到“低精度”水边线的距离方差。σ2越大表示两条线越不相似,越小表示越相似。方向描述的是“高精度”线元对象与“低精度”水边线的夹角,角度应用下式来计算:

式中,dmax、dmin及L分别指“高精度”线元对象到“低精度”水边线的最大、最小距离及其自身长度。拓扑关系这里仅指“高精度”线元对象位于“低精度”水边线的左侧还是右侧,用正负值表示。
3.3.2 光谱特征计算方法
理论上水边线两侧的光谱应符合水体与非水体光谱特征,两侧光谱具有不相关性。利用下式计算水边线两侧像元光谱的相关性[25]:

式中,ρij表示光谱曲线i与光谱曲线j的相关系数,如果两条光谱曲线完全相同,它们的相关系数为1,否则相关系数小于1;xik表示光谱曲线i中第k个波段的光谱值;xjk表示j光谱曲线中第k个波段的光谱值;m表示波段的个数;表示光谱曲线i的平均值;表示光谱曲线j的平均值。
3.4 水边线识别与连接方法
3.4.1 面向对象的水边线识别方法
遥感图像上检测出的水边线在空间特征与光谱特征上有自身规律,依据这些先验知识构建分类准则,基于决策树分类方法识别“真”水边线对象。决策树分类依据边线长度、形状相似度、方向、位置及光谱属性不断地划分边线数据,使边线的差别最大,在依赖变量的值上建立最强的归类。
3.4.2 基于“低精度”水边线的水边线连接方法
“低精度”水边线位置精度不高,但较好地表达了水边线的形状。当“高精度”水边线出现断裂时,可以依据“低精度”水边线,完成“高精度”水边线连接。实现过程为:将断裂处两端的水边线作为一个对象,经旋转、平移后,使其与“低精度”水边线完成最佳重合。进而截得局部“低精度”水边线作为“高精度”断裂处水边线。
3.5 遥感影像增强方法
在水边线提取的不同阶段采用不同的影像增强方法。在“低精度”水边线提取中使用高斯滤波方法对band 6 进行噪声去除。在“高精度”边缘检测中,海陆对比度增强方法较复杂,主要分成两步完成:(1)综合应用最佳指数法(OIF)、离散度计算方法确定水边线提取的最佳波段组合[26];(2)对最佳波段组合应用颜色模型变换方法[27],进一步增强海陆对比度,选取H 分量用于Canny 算子边缘检测。
为了清晰起见,在图2 中给出了滩涂水边线遥感提取方法流程图,概要地说明了本文的算法和影像处理步骤。

图2 技术方法流程Fig.2 Technical method flow chart
4 实验过程与分析
应用本文提出的空间关系与光谱特征相结合的水边线遥感提取方法在大潮低潮期(落潮)条件下提取长江口崇明东滩的水边线,证明方法的可行性和有效性。
4.1 “低精度”水边线提取与分析
计算Landsat-5 影像各波段DN 值直方图,结果如图3 所示。滩涂地区水体与非水体比热差别较大,band 6 具有明显的双峰特性。因此,在热红外波段应用动态阈值分割法提取海陆边界线具有可行性。
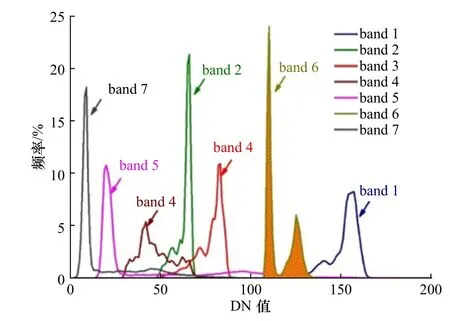
图3 Landsat-5 影像各波段DN 值直方图Fig.3 Histogram of DN value of each band of Landsat-5 satellite image
应用局部自适应阈值算法分割band 6,经形态学方法处理后得到“低精度”水边线。局部自适应窗口大小设置为25 像元×25 像元,上下、左右的重叠度均为12%。将“低精度”水边线提取结果叠加到假彩色(band 7、band 5、band 2)遥感影像上,如图4 所示。提取的“低精度”水边线连续、平滑、完整,形状与实际水边线相似。

图4 “低精度”水边线及水边线掩膜Fig.4 Low precision waterline and waterline mask
“低精度”水边线检测方法有效检测出了海陆之间的分界线,并没有检测出潮间带潮沟轮廓、植被间分界线、海水冲刷痕迹线及滩涂内堤坝等非水边线信息,有利于水边线的连续、平滑描述。但是这种方法将堤坝内部的海塘及海水里面的孤岛等水边线提取出来,图4 中用绿颜色的线描述。这些边线具有闭合特征、周长和所包围面积较小,依据这些约束条件计算机可自动对其删除。通过叠加分析,“低精度”水边线对于大尺度的滩涂水边线形状描述还是比较准确的,定位误差不超过4 个像元,即120 m。按3 倍中误差思想,依据“低精度”水边线在30 m 空间分辨的影像上创建25 个像元宽度的缓冲区(图4 中,深红色曲线为缓冲区边线),构建水边线掩模,并应用到遥感影像上。“高精度”边缘检测,在应用掩膜后的遥感影像中完成。这样不仅提高了边缘检测的速度,而且在后期水边线的识别中效率也大大提高。
4.2 “高精度”边缘信息检测
4.2.1 遥感影像增强结果与分析
通过比较发现,颜色模型变换法海陆对比度增强效果最佳,这与刘永学等[27]的研究结果一致。为了进一步提升海陆对比度效果,在颜色模型变换前应用OIF 方法和离散度方法确定最佳波段组合。经过计算band 7、band 5、band 2 是信息最为丰富的波段组合,最佳指数(OIF)为8.4,同时离散度最高(值为0.7)。最后选取HLS 颜色模型变换后的H 分量作为增强后的结果。图5 为图4 中黄色矩形内影像颜色模型变换后的H 分量密度分割结果。作为对比,图6是使用归一化差异水体指数(NDWI)增强海陆对比度的密度分割结果。可以明显的看出,本文的方法明显优于后者。
4.2.2 “高精度”边缘检测与分析
为了证明最大类间方差方法的有效性,选用经典的全阈值Canny 算子与其对比。在增强后的遥感影像上应用水边线掩膜,然后,使用两种方法检测“高精度”边缘。两种方法检测的结果如图7 所示,其中,图7a为全阈值Canny 算子检测出的“高精度”边缘,图7b为本文提出的方法检测出的“高精度”边缘。

图5 HLS 颜色模型H 值密度分割结果Fig.5 H-value density segmentation results of the HLS color model
对比图7a 和图7b 可知,本文提出的边缘检测方法具有以下优势:(1)边缘检测能力全图具有一致性。从图7a 可以明显的看出,图的上半部分具有丰富的边缘信息,而下半部分仅检测出了2 条边缘,而图7b 上下边缘信息具有较好的一致性;(2)边缘检测能力更强。在图7a 上半部分检测出了过多的剩余水体边界,但是在位置②“高精度”水边线并没有被有效检测出来,在位置①内侧缓冲区边线也大量丢失。在图7b 中,剩余水体边界很少被检测出来,但是较大潮沟边界、大多数“高精度“水边线(例如位置②处)及缓冲区边线(例如位置①处的内侧缓冲区边线不再丢失)均能够效检测出来。

图6 归一化差异水体指数密度分割结果Fig.6 Normalized difference water index density segmentation result

图7 全阈值Canny 算子(a)和本文方法(b)检测出的“高精度”边缘结果Fig.7 High-precision edge results detected by the full-threshold Canny operator (a) and the method (b) of this paper
在边缘检测过程中设定局部窗口大小与水边线掩膜宽度一致(25 像元×25 像元,重叠度为12%),窗口移动轨迹为“低精度”水边线。因此,该方法的计算量非常小,极大提高了“高精度”边缘的检测速度。在某些情况下本文提出的方法也存在边缘检测不理想的情况。例如,在图7b 中③所指的地方,由于坡度过于平缓“高精度”水边线缺口较大;在②所指的地方,受坡面驻留水体影响“高精度”水边线出现了分叉现象。在“高精度”水边线提取中需要解决这两个问题。这里还有一个问题需要说明,那就是在图7a、图7b的④处指的位置均存在毛边的现象,图7b 虽然有所改善,但没有完全解决。
4.3 “高精度”线元对象属性计算
在“高精度”线元对象属性计算前,依次要进行边线分离、边线筛选及边线编号等预处理工作。边线分离是将子边线与母边线分离,本文将长边线作为母边线,如图7b 中②所示。在实际中应用9 像元×9 像元模板计算大角度变化曲线,在交点处对其进行分离。边线筛选是对分离后的各边线进行长度计算,去掉离散点及较短边线(设定阈值一般小于5 个像元)。边线编号指的是对剩余的边线进行统一编号,便于后续“高精度”线元对象的属性计算。
依据3.3 节介绍的方法计算边线对象的空间特征和光谱特征。表1 描述了“高精度”线元对象属性的记录结果与格式。其中,“高精度”线元对象位于“低精度”水边线向陆一侧时,用正值表示;向海一侧时,用负值表示。光谱特征计算使用的是“高精度”线元对象两侧像元光谱相关系数的平均值。光谱相关系数计算选择了对水、陆敏感的band 2、band 5、band 7波段。

表1 线元对象属性计算结果(单位:像元)Table 1 Line object property calculation results (unit:pixel)

图8 最后的水边线提取结果Fig.8 Final results of waterline extraction
4.4 “高精度”水边线对象识别
4.4.1 水边线识别结果与分析
利用决策树分类方法对于上述具有空间特征和光谱特征的“高精度”线元对象进行分类,完成水边线识别。经过反复的实验依次按照位置、长度、形状相似度、方向和光谱相似度进行决策树分类,阈值依次设为2 像元、8 像元、0.6、15°及0.50,水边线检测效果最好。在这一步中,水边线的识别是从可靠性最高的线元对象开始,而并不是从第一条存储记录的线元对象识别水边线,从而保证了水边线识别的正确性。识别顺序按照空间相邻关系依次识别线元对象,在决策树分类中充分利用上下文关系,进一步提高了水边线检测的质量。
图8 中蓝色曲线为决策树分类方法识别的“高精度”水边线。从图中可以看出,除了“高精度”水边线外,没有多余的边线。因此,基于空间特征与光谱特征的决策树分类,可以作为“高精度”水边线识别方法。
4.5 “高精度”水边线连接与质量分析
4.5.1 “高精度”水边线连接
经过上述步骤得到了细节丰富的“高精度”水边线。遗憾的是,在极弱水边线处有较大缺口,按照3.4.2 节方法完成水边线连接。在连接时,缺口与邻近水边线长度比例设定为1∶3(经验值),当高、低精度水边线具有最佳重合时(重叠度一般大于80%),用“低精度”水边线描述“高精度”水边线。
图8 为最后的水边线提取结果。在图8 中箭头所指的地方,a、b 分别是放大表示的“高精度”与“低精度”水边线。两者形状基本相似,但“高精度”水边线细节表现力更强。在箭头②位置处是水边线连接处,通过放大也很难看出连接痕迹。在③处有最长连接线,通过与原始影像叠加水边线定位误差不超过2 像元。在极弱水边线处,坡面驻留大量的水体,水体边线很多,很难确定哪一条才是真正的水边线。但是,在“低精度”水边线的空间约束下,计算机选择了离它最近的,且平行的边线作为水边线,可靠性更高。当“高精度”水边线没有检测到的时候,利用相邻的“高精度”与“低精度”水边线空间关系,借助“低精度”水边线完成水边线的连接,计算机描绘出了很高质量的水边线。
图9 是检测到的“高精度”水边线叠加在遥感影像上的部分结果。其中,图9a 是高精度水边线在原始遥感影像上的叠加结果,图9b 是图9a 红色矩形框内放大4 倍后的显示结果。从图9 中,可以明显看出“高精度”水边线具有非常高的平面位置精度。
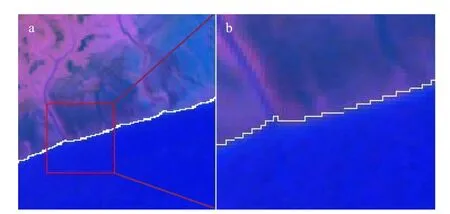
图9 “高精度”水边线平面精度分析Fig.9 High precision waterline error analysis
因此,本文提出的将空间特征与光谱特征作为约束条件的水边线遥感提取方法是滩涂水边线遥感提取的有效方法,最后得到的水边线连续、完整、细节丰富、定位精度高。
4.5.2 水边线质量评价
为了验证空间关系结合光谱特征提取滩涂水边线方法的性能,另外使用该方法提取了中高潮位(涨潮)、低潮位(涨潮)两景Landsat-5 遥感影像水边线。影像成像时间分别为2007 年7 月28 日和2006 年3 月3 日。将3 期遥感影像提取的水边线叠加在2006 年4 月20 日的遥感影像上,结果如图10 所示。从水边线的平面位置精度与水平性两个方面评价水边线提取质量。

图10 不同潮情提取的水边线Fig.10 Waterline extracted from different tidal conditions
1)平面位置精度评价
将目视解译获取的水边线作为参考值,利用下式计算参考水边线与提取水边线之间的距离,

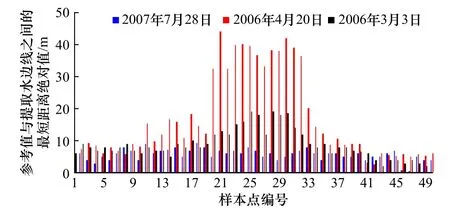
图11 水边线平面误差统计Fig.11 Waterline plane error statistics
针对3 景遥感影像提取的水边线,计算平面位置精度,图11 为水边线平面误差统计分布。样本点是从水边线最北端到最南端等间隔选取的50 个点,并依次编号。
7 月28 日水边线平面位置误差最大值为9.3 m,最小值为0 m,标准差为1.8 m,没有明显空间分布特征。4 月20 日水边线平面位置误差最大值为44.0 m,最小值为0 m,标准差为13.1 m。误差分布南北对称,较大误差主要集中在崇明东滩最东端。3 月3 日水边线平面位置最大误差为18.5 m,最小误差为0 m,标准差为4.5 m,较大误差也主要分布在崇明东滩最东端。崇明东滩最东端坡度极为平缓、常驻有大量的剩余水体,落潮期尤为严重。滩涂表面的剩余水体是影响滩涂水边线提取的主要因素。7 月28 日水边线属于中高潮位(涨潮),滩涂表面剩余水体最少,海陆对比度强,水边线提取精度最高并具有一致性。4 月20 日水边线处于大潮低潮位(落潮)比3 月3 日水边线潮位(涨潮)略高,但因为是落潮,滩涂表面的剩余水体更多。因此,3 月3 日水边线比4 月20 日水边线的位置精度高。
2)水平性精度评价
以2006 年全站仪测量技术获取的1∶1 万滩涂地形图为基础数据,利用ArcGIS 软件生成格网尺寸为30 m 的滩涂数字高程模型(DEM),格网尺寸与遥感影像空间分辨率相同。针对水边线平面位置精度统计的样本,提取样本点对应的吴淞高程系统高程信息。去除明显错误的数据,最后统计出3 条水边线上最大高程分别为3.4 m、0.4 m 和0.3 m,最小高程分别为3.1 m、0.1 m 和0 m,平均高程分别为3.26 m、0.23 m和0.14 m,标准差分别为0.14 m、0.12 m 和0.10 m。
图12 为水边线水平性误差统计分布结果。从图中可以看出水边线高程呈现出从南往北逐渐升高的趋势,表现出了南高北低的特征,高程差约为0.3 m。研究区水边线高程南部高于北部的主要原因是长江口南支水流量远大于北支水流量,在潮汐作用下表现出了高程差异。

图12 水边线水平性误差统计Fig.12 Waterline horizontal error statistics
5 结论
针对遥感影像海水、陆地自动化分割,特别是滩涂弱水边线难以提取的问题,本文综合利用了热红外波段容易探测海陆差异的特性和Canny 检测算子边界定位精度高的优点,利用热红外波段给出了水边线的空间特征与光谱特征计算方法,基于面向对象思想提出一种顾及空间关系和光谱特征的Landsat-5 遥感影像水边线快速提取方法。实验结果表明,该方法具有以下特点:(1)自动化程度高、人工干预少。基于最大类间方差法的局部自适应算法阈值分割、Canny 边缘检测原理简单,计算机比较容易实现,提取过程中基本不需要人机交互。(2)多重约束,可靠性强。结合空间关系和光谱属性特征的面向对象决策树分类,漏分误差和错分误差很小,不仅强水边线提取效果良好,对于水边线的弱边缘也能够取得良好的效果。(3)连续性好,定位精度高。借助“低精度”水边线,基于空间关系实现水边线连接,构成连续完整的水边线,并且在定位精度上继承了Canny 算子边缘检测精度高的优点。(4)不需迭代计算,效率高。在水边线提取的各计算环节不需要迭代计算,影像分割、边缘信息检测及水边线连接效率较高。结合空间特征与光谱特征的遥感影像水边线快速提取方法本质上是面向对象分类技术的拓展。将边线看作对象,通过引入“低精度”水边线计算边线的空间特征、结合光谱特征解决了滩涂弱水边线遥感提取的难题,但还有以下问题值得说明:潮沟是滩涂地形地貌的重要组成部分,本文在水边线提取过程中,删除了潮沟信息,在后续研究中应针对潮沟的空间特征与光谱特征开展潮沟信息提取实验。
