l步信息脉冲牵引控制的多智能体一致性分析
2021-04-29李智勇黄振坤宾红华
李智勇,黄振坤,宾红华
(集美大学理学院,福建 厦门 361021)
0 引言
由于多智能体系统的一致性问题被广泛地应用到许多领域,如编队控制、无人机、传感器网络和卫星姿态控制等[1-4],所以近年来许多学者开始关注和研究这一问题。一致性控制的基本思想是根据邻接点的状态和自己的状态调整自己的状态,最终使所有智能体的状态趋于一个常数[5]。所以多智能体系统的一致性问题也可以看成一个特殊的神经网络同步问题[6-7]。文献[8]给出了一致性问题的理论框架和一个具有一致性协议的多智能体系统。在一定条件下,这个系统中的所有智能体的状态都收敛到初始状态的平均值。
然而,在实际应用中,经常要求所有智能体的状态都收敛到某个给定的值[9]。牵引控制是通过对网络中的一些节点实施控制,从而达到协调控制整个网络的目的,是一种很有效的方法。这种方法被成功地应用于解决多智能体网络的一致性控制问题[10]和复杂网络的牵引同步问题[6]。文献[6]的研究结果表明,在一定条件下,只要对单个节点实施牵引控制就可实现对整个网络的控制。但是,它要对单个节点进行连续地牵引控制,成本较高。由于脉冲控制具有成本较低、易于实现等优点,所以它被广泛地应用于许多领域,如航天器控制、神经网络和多智能体等[11-16]。文献[5,13]把牵引控制和脉冲控制结合起来,证明了在一定条件下只需要对一个智能体实施脉冲牵引控制就能使多智能体系统达到一致性。
在实际应用中,信息交流经常存在时延,所以许多学者研究了存在时滞情形下的多智能体的一致性问题[8,16]。受此启发,如果掌握了脉冲前智能体的状态信息和前l-1次脉冲前智能体的状态信息,这将有助于得到更精确的脉冲牵引控制。把这个思想和文献[5,13]的方法相结合,本文提出了用基于l步信息脉冲牵引控制的方法来研究多智能体系统的一致性,并且给出了一个使系统达到一致性的充分条件,并且选择恰当的l有助于减少使多智能体系统达到一致性所需的脉冲次数。
1 预备知识

本文总是假设网络通讯拓扑结构图G是无向连通的,所以有下面的引理1成立。
引理1[13]拉普拉斯矩阵L有单重特征根0,其余特征根均大于0。
考虑如下的基于l步信息脉冲牵引控制的多智能体系统:
(1)

注1 若l=1,则系统(1)就是文献[13]所研究的系统。
假设1 存在常数δ,Δ,b0∈R,使得∀k∈Z+,都有|1-bk0|≤|1-b0|<1,且0<δ≤tk-tk-1≤Δ<+∞。


2 主要结果

(2)
当t∈(tk-1,tk)时,系统(2)可化为

(3)

(4)
由|1-bk0|≤|1-b0|<1可知
(5)
由|bkj|≤bj、式(4)~式(5)和引理2,可知
(6)
下面用数学归纳法证明:∀k∈Z+都有
(7)
当k=1时,式(7)显然成立。
(8)

(9)



(10)

注2 若l=1,则定理1 的条件就变为只需要假设1 成立,文献[13]所得到的结论就是定理1 的一种特例。
3 仿真实例


当l>1时,取所有bkj=bj=(1-γ-0.001)/(l-1),j=1,2,…,mk,显然定理1的条件成立。可得到满足终止准则所需的脉冲次数与l的关系如图2所示。
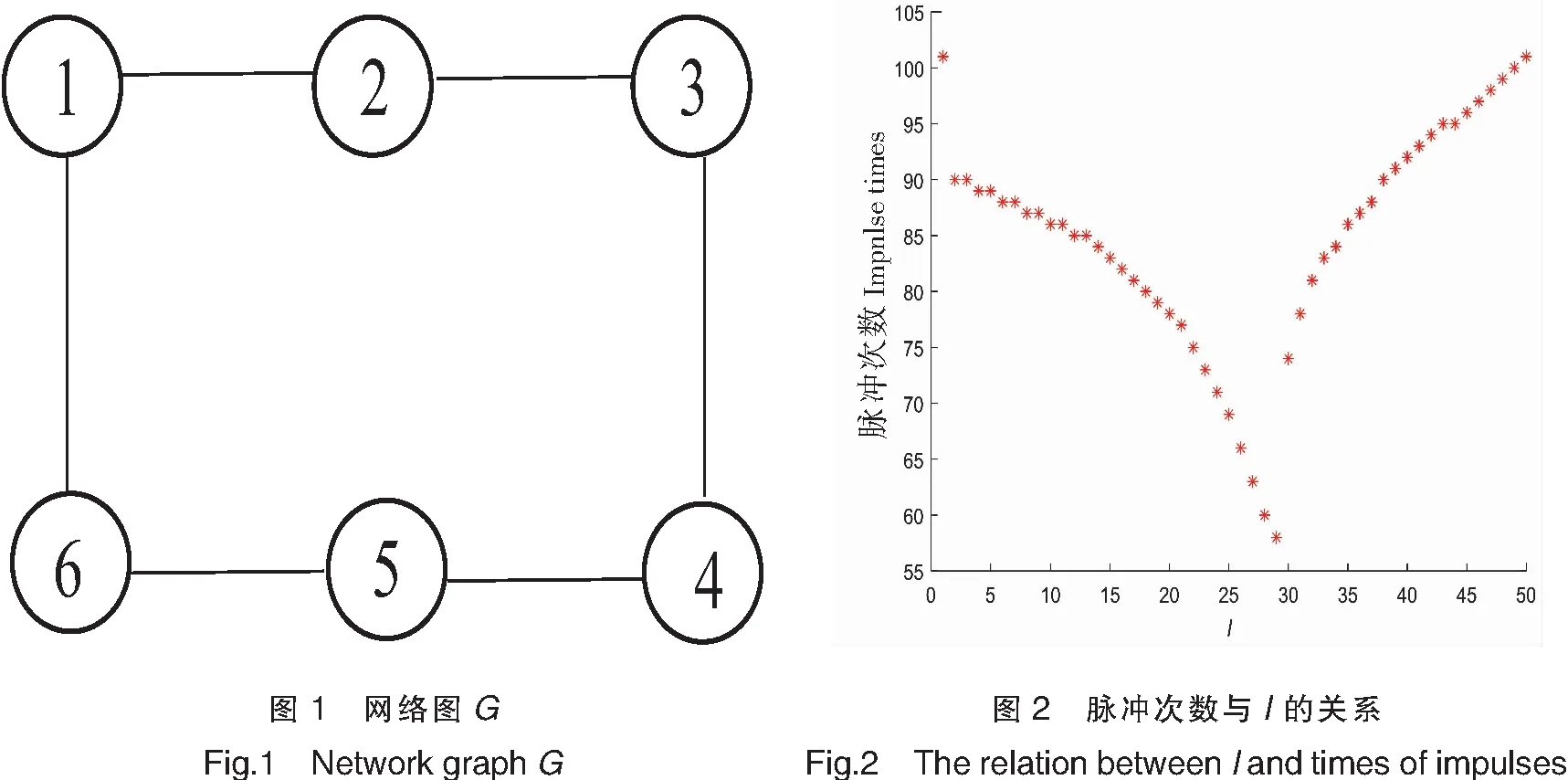
取l=1,所有智能体的状态轨迹如图3a所示。取l=29,取所有bkj=bj=(1-γ-0.001)/(29-1),j=1,2,…,28,所有智能体的状态轨迹如图3b所示。

4 结论
本文把具有单个脉冲控制器的多智能体的一致性系统推广到只对一个智能体实施基于l步信息脉冲牵引控制的系统。在通讯拓扑是无向连通图的情况下,给出了使多智能体达到一致性的一个充分条件,仿真实例验证了理论结果。本文是对文献[13]的一种推广。由仿真实例可知,在使多智能体系统达到一致性的条件下,本文在选择恰当的l后所需的脉冲次数比文献[13]的少得多。