某纯电动汽车电动助力转向调校及客观测试
2021-04-28
(奇瑞新能源汽车股份有限公司,芜湖 241002)
0 引言
目前随着汽车行业的发展,汽车智能驾驶功能普及,传统的液压转向系统逐渐不能满足要求,而电动助力转向系统则可以满足自动泊车、车道偏离等智能驾驶功能要求。
电动助力转向系统的工作过程主要包括:驾驶员在转向时,安装在转向管柱中的扭矩和角度传感器,根据检测到的扭矩角度大小,发送信号到转向控制器中。转向控制器再结合整车CAN信号中的车速信号进行判断,根据助力曲线中对应的扭矩大小,发送指令给转向电机输出对应的大小的转向助力扭矩,从而产生助力效果,减轻驾驶员操作手力。本文主要介绍某纯电动汽车转向调校过程及转向客观测试结果。
1 电动助力转向原理
汽车转向过程中的力矩关系如下:
转向阻力矩=电机助力矩+驾驶员操作方向盘力矩
转向阻力矩主要受汽车载荷、四轮参数及转向系统刚度等影响,这些随整车参数确认而定。而驾驶员直观感受只有方向盘力矩,调整方向盘力矩只有通过优化调整电动助力转向曲线来实现,转向曲线主要包括基本助力和动态补偿两大部分,其具体工作原理如图1。
基本助力包括:助力、回正和阻尼3 大控制,其根据制定好的曲线关系,根据实时采集到的方向盘转矩、角度和车速信号,输出对应的助力扭矩。而动态补偿包括:摩擦、阻尼和惯性3 大补偿,其主要弥补电机助力的弊端,提高转向时的整体效果。
2 转向调校过程
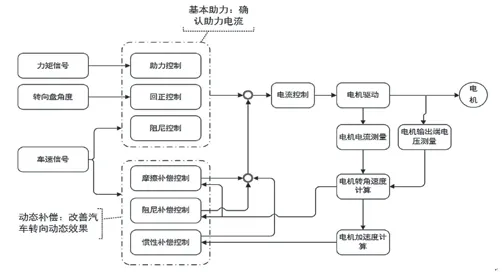
图1 电动助力转向工作原理
本次转向调校在转向系统刚度不变的前提下,更换转向电机(电机功率、电流提升),匹配相应助力曲线,从而满足驾驶员的要求,提升转向整体品质。
2.1 基本助力
基本助力功能为电动转向基本功能,某车型随着前载荷的增大,基本助力存在如下问题:①原地/低速转向手力偏大;②转向力随车速变化有明显的建立,但转向力的增益偏大;③弯道中高速行驶工况转向力偏大。针对3 项问题进行助力曲线优化调校,其优化前后对比如图2。
不同车速下转向时对方向盘施加的扭矩不同,而整车满载前载荷是固定的,因此需要电动助力转向系统根据输入扭矩的不同,产生对应的输出扭矩,为驾驶员提供转向助力[1]。转向调校的总体方向:驻车低速轻便,高速稳重。
在转向小转矩范围内,助力矩应最小,随转矩值的上升,助力矩逐渐上升后保持一定值不变。其中小转矩内电机小助力或不助力的目的为:保持驾驶时路面感觉的传递,防止丧失路感。而为保持较好的中间位置感觉,随着车速的升高,不助力的区域应增大。另一方面,助力上升后保持一定值不变,也是受电机峰值功率限值,达到保护电机的目的,避免过载情况。
根据汽车转向特性可知,汽车在静止和低速状态下受到的转向阻力最大,因此需要的转向助力值最大。为达此目的,原地和低速时转向助力曲线最高。而随着车速的增加,施加的转向助力应逐步减小,使驾驶员手力逐渐增大,以便获得较好的路感,达到高速稳定的目的,提高行车安全。
在中高车速下,曲线中助力矩增大到一定值时也应该保持不变,且最高值的大小随车速的增加逐渐降低,以便驾驶员手力有明显清晰增加的感觉,提高驾驶乐趣。曲线随车速、转角增加,各曲线的间隙要保持均匀,过渡要平滑,使力的增加过程无突变无波动,力的线性感好。
由于本次调校助力电机功率提升,针对问题①,加大原地及低速时助力扭矩峰值大小,减小驾驶员手力,通过调校后评价测试满足要求;针对问题②和问题③,增加各车速助力曲线间隙和峰值,使力的建立感清晰。而峰值提高可解决中高速和大转角手力偏重问题。
图2为调校前后基本助力曲线对比,横坐标为扭矩传感器检测到的扭矩信号,其中转向角度和扭矩成正比关系;纵坐标为助力电机扭矩的大小,值越大助力矩越大,手力越轻;不同颜色代表不同的速度下的助力曲线。通过调校前后的曲线对比可知,调校后曲线纵坐标最大值提高到60 N·m,各速度下曲线峰值整体提高,且各曲线间隔较之前更加均匀,不同速度下曲线峰值有明显的区分。经过一轮转向调校,转向品质有提升。
2.2 回正控制
汽车的主动回正功能与车轮结构形式、车轮外倾角、主销后倾角、内倾角、四轮参数及前桥总成摩擦力矩相关[2],而回正主要包括低速回正和高速回正。某车型回正性能主要有如下问题:①低速工况转向回正有较大的残余角,极限位置有卡滞情况;②中高速工况,小角度不回正,大角度回正速度偏快,方向盘有多次振荡情况。针对这2 项问题,进行回正和阻尼控制调校。
回正控制主要针对中低速工况,不同角度、不同车速下的回正参数不同。原地静止工况不存在回正性能;低速工况下所需回正力矩最大;随车速的增加四轮主动回正力矩增加,所需力矩逐渐降低。当车速达到一定值后,助力矩为零,防止助力矩大于同工况下无助力时转向驱动力矩,出现“打手”现象。
回正控制随转向角度的变化而逐渐增大,转向达到一定角度后保持力矩恒定,0°转向情况下方向盘已为回正状态,回正力矩为零。而5~10°小角度工况,避免出现不回正情况,回正力矩最大。
图3为回正控制曲线,横坐标为方向盘角度信号,纵坐标为助力电机扭矩大小,不同的颜色代表不同的速度曲线。通过调校前后的回正控制曲线对比,调校前的曲线针对低速回正有较大残余角,主要原因为回正力矩不足导致。调校后提高各速度下的助力扭矩,另一方面针对低速极限位置卡滞情况,提高低速(图3中5 km/h)时极限角度的助力扭矩值,可有效避免卡滞不回位情况。
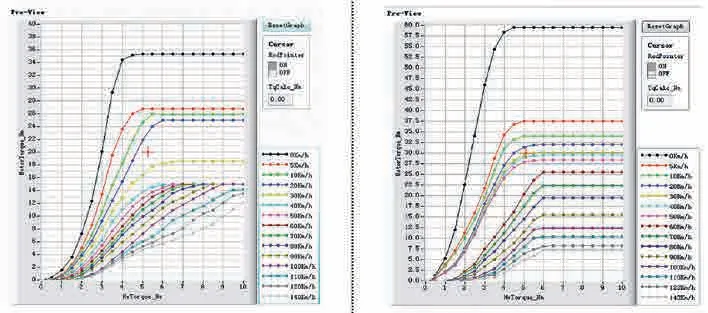
图2 某电动汽车转向助力曲线(左:原始状态,右:调校后)
2.3 阻尼控制
阻尼控制主要针对中高速工况,用于不同车速和不同角速度下的阻尼补偿。阻尼补偿主要为了避免车辆自身回正力矩过大不容易收敛,EPS 电机通以一定反向电流并持续一定的时间来抵消。当小于一定车速时,不添加阻尼,以防止低速回位卡滞情况发生;而当大于一定车速工况时,车速和转向速率越快,阻尼补偿越大,来限值方向盘回正后来回左右摆动情况。
阻尼控制的另一个目的,则是减小路面冲击对方向盘的影响。汽车中高速行驶时,由于路面的激励较大,传递到方向盘上的振动要比低速时大很多。为了抑制这种振动并优化手感,必须采用阻尼控制。
图4为阻尼控制曲线,横坐标为方向盘转角变化的角速度,纵坐标为助力电机扭矩大小,不同的颜色代表不同的速度。通过对比调校前后的阻尼控制曲线,调校后的曲线针对回正速度过快的问题,降低助力扭矩的纵坐标大小,减少回正扭矩大小,以减缓回正速度。同时提高各曲线的斜率,阻尼控制更加精准,可有效抑制方向盘在中高速回正时来回摆动的问题。
通过回正和阻尼的协调调校,不同速度下的转向回正性能有很大提升。
2.4 动态补偿
由于电动助力转向系统在机械转向系统中增加了助力电机和减速结构,使得整个转向系统质量变大,随之导致系统惯性变大,因此必须添加动态补偿控制(图5)。动态补偿是根据预估的助力电机转速,产生一定反向的补偿力矩,避免转向电机在开始阶段和结束阶段存在转向粘滞感,导致转向助力跟随性变差。
摩擦补偿:由于转向系统摩擦的存在,使方向盘正转回转力矩均存在差异。摩擦补偿可有效弥补这种力矩差,避免驾驶员有“发飘”的感觉,增强路感。
阻尼补偿:用来克服电机的阻尼对EPS 动态性能的影响,保证高速时抑制回正超调和振荡的情况发生。阻尼补偿产生的转矩与助力电机的方向相反。
惯性补偿:主要目的为克服转向电机的惯量对输出的影响,抑制输出力矩扰动,避免输出存在力矩波动情况,影响转向手感。
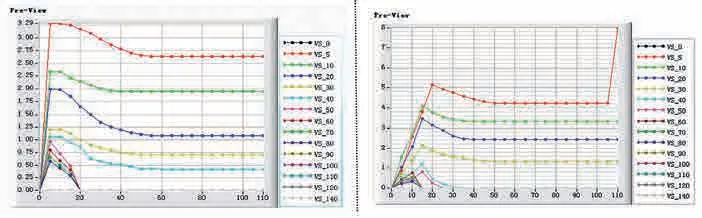
图3 回正控制曲线(左:原始状态,右:调校后)
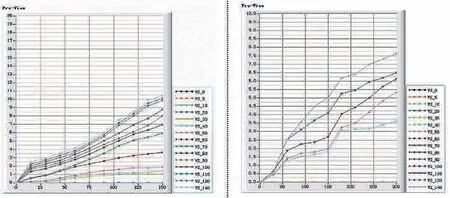
图4 阻尼控制曲线(左:原始状态,右:调校后)
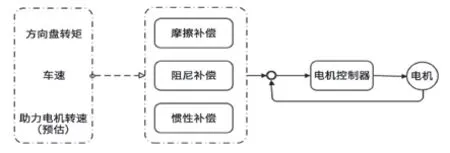
图5 动态补偿图
3 主观评价及客观测试
从目前的汽车性能开发来说,都还是严格遵循着“从人的感觉中来,到人的感觉中去”的规则。也就是说,系统的性能开发是以人的感觉为出发点,然后设定转向系统的性能工程目标,最后再用主观评价的方式对转向系统的性能开发目标进行验证,客观测试作为辅助[3]。
3.1 主观评价
对助力曲线进行调校后的样车,从转向力、转向响应和转向线性3 方面进行主观评价验证(表1),通过与调校前和目标值进行对比,达到目标要求(图6)。
3.2 客观测试
主观评价目标达成,后续进行一轮转向客观测试,作为最终的验证发布数据留存。客观测试主要进行转向力测试和中间位置转向,采用设备为测力方向盘和V-box 车辆测试系统(图7)。
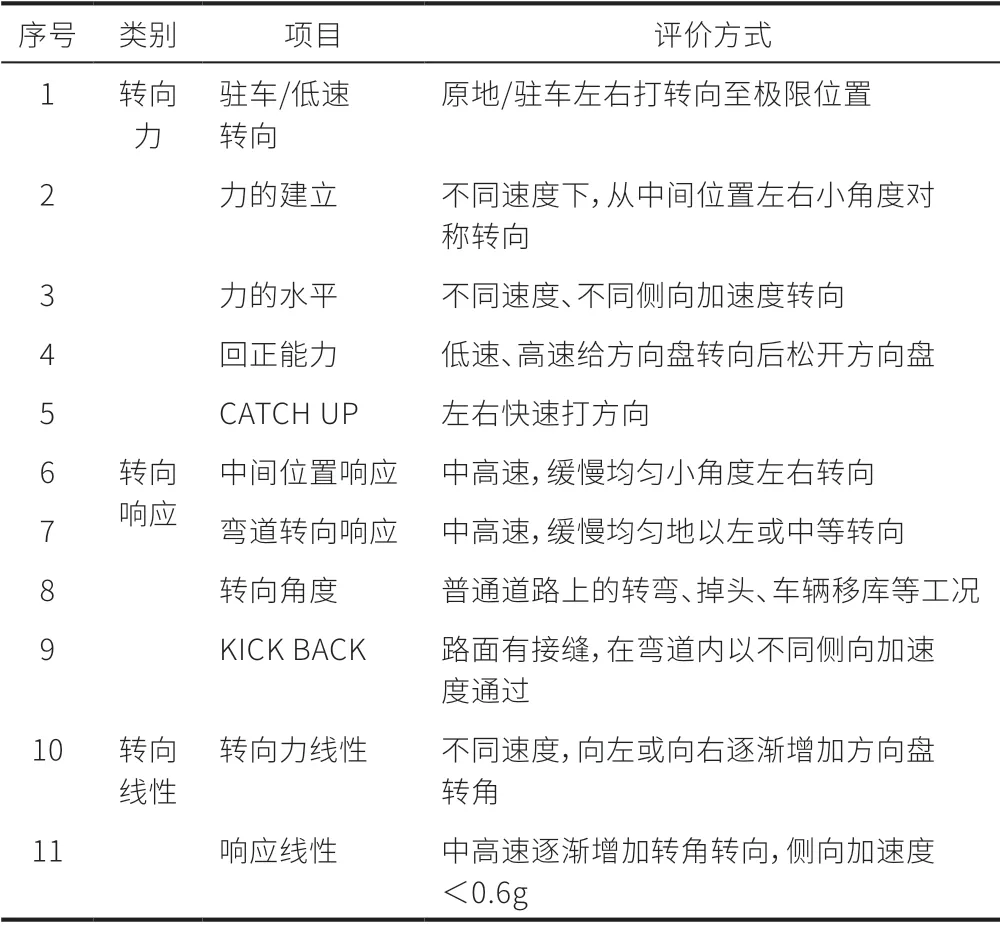
表1 转向主观评价内容
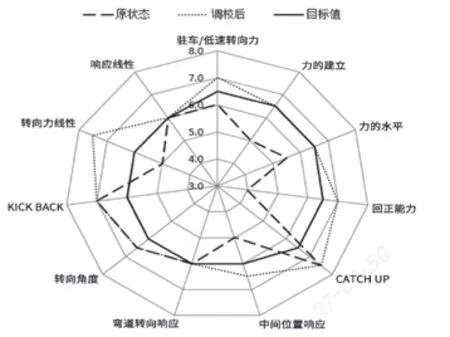
图6 转向主观评价结果雷达图
3.2.1 转向力测试
转向力测试中,包括原地转向力和低速转向力,测试方法参考JASO C705-2004 中的要求。通过测试结果可以看出(表2),驻车及低速的目标为轻便,减轻驾驶员操作手力。经过对比,调校前平均力矩为2.53 N·m,调校后为1.47 N·m,总体转向力矩有下降,符合一般客户的使用要求。
3.2.2 中间位置转向试验
中间位置转向试验方法参考ISO13674-1-2010[4]。通过测试不同车速下(40 km/h、60 km/h、80 km/h 和100 km/h),侧向加速度为0 g 和0.1 g 时方向盘力矩值(表3)。通过测试结果可以得出,随着车速的逐渐提高,方向盘力矩逐渐增加,力的建立清晰。

表2 转向力测试结果

图7 转向客观试验安装图

表3 中间位置转向试验结果/N·m
4 结束语
综上所述,电动助力转向调校的过程,首先针对调校车辆进行一轮初始状态主观评价,针对评价后的问题点,专项进行问题整改及性能优化。其过程主要是进行转向曲线的优化调校,包括调整基本助力、回正控制、阻尼控制和动态补偿等参数,然后根据调校的经验值和推荐值设定曲线的范围和方向。当调校后目标达到要求后再进行一轮主观评价和客观测试留存。当软件不能满足要求后,可以通过提升转向系统刚度(转向管柱总成或转向机安装座衬套等),辅助提升转向性能。
