基于无人机航拍的地质剖面三维建模方法研究
2021-04-24李潇雨陈晓慧
李潇雨 陈晓慧
(西南石油大学地球科学与技术学院,四川 成都610500)
地质露头的考察是地质研究中必不可少的部分,其记录着丰富的地质信息。随着三维化技术的发展,对地质露头进行三维建模是野外考察的发展趋势。随着无人机技术的普及,以无人机航拍影像为基础来建立三维露头模型已成为地质建模研究的新方向。
前人在进行地质露头时主要是利用三维激光扫描仪将地质露头点云化(董秀军,黄润秋,2006);刘学峰等采用LIDAR 扫描仪结合高清数码相机也对地质露头进行了三维化,但三维激光扫描技术有着仪器昂贵、操作专业度高、架设条件严苛、采集耗时较长等缺陷;南京地质古生物研究所在2014 年采用全景图展示与GBDB 数据平台相结合的方式采集了野外露头(侯旭东,樊隽轩等,2014),但未建立三维地质模型,难以从多角度精细观察。基于前人的研究成果,本研究决定采用无人机航拍技术与桌面软件相结合的方式进行研究,构建地质露头的三维模型。
1 概述
目标剖面位于贵州省安顺市关岭县永宁镇(图1),地处扬子准地台黔北台隆普安扭旋构造变形区,位于燕山期前形成的垭都-紫云古断裂、陆良古断裂,开远-平塘古断裂围限的三角地带。地质构造为黔西山字型构造前面弧的西翼,基本呈北西向45°展布,主要由一束大体平行的较紧密褶皱和逆断层组成,仅西北部丙坝、岗乌有一部分呈东西向展布(沈诚,2014)。该剖面自下而上,除下三叠统夜郎组部分出露以外,出露下三叠统嘉临江组、中三叠统关岭组、中三叠统杨柳井组、中-上三叠统法郎组、上三叠统赖石科组。岩性主要以灰岩、白云岩为主夹细碎屑岩(孙俊,何妙玲等,2019),为浅海台地沉积相区。本次研究主要层位为中-上三叠统法郎组主竹杆坡段与瓦窑段。
研究采用了传统野外数据采集方式与无人机倾斜摄影技术相结合的方式展开,同时参考了大量前人的研究资料与文献,在进行传统的剖面实测时加入了无人机倾斜摄影测量。研究时重点对永宁剖面的下三叠统嘉临江组、中三叠统关岭组以及中-上三叠统法郎组进行了剖面实测,同时利用无人机进行了高空整体航测,随后选取了三段出露较好的露头进行局部精细航拍测量,共取得无人机倾斜摄影照片1500 余张,随后即利用Pix4DMapper 软件对航拍影像进行了后期处理,并生成了与野外露头相匹配的三维模型(图2)。

图2 研究流程图

图1 研究区地理位置图
2 无人机航拍
2.1 设备简介
本次研究测量设备选用的大疆创新“悟inspire2”系列集成飞行器,同时搭载了“禅思ZENMUSEX5S”云台相机。悟inspire2采用镁铝合金可变形机身,碳纤维机臂,从材料上实现了机身轻巧,在机身配置了两轴FPV 摄像头用作环境感知,可精准避开障碍物,同时具备较强的抗风能力,可在10m/s 的风速下稳定拍摄。禅思ZENMUSE X5S 云台相机具有有2080 万有效像素,结合悟inspire2 的CineCore2.0 高性能影像处理器可支持最高5.2K 分辨率的照片拍摄,呈像清晰,拍摄仰俯角范围+40°至-130°,水平范围±320°使拍摄更加容易。
地面遥控采用的悟inspire2 适配遥控器搭配辅助接收影像的iPadmini,最大可控半径可达7KM,控制软件使用IOS 系统的“Pix4Dcapture”软件可规划飞行航拍线、实时控制飞行状态、手动拍摄等功能(表1)。
2.2 野外剖面航测
利用无人机搭载倾斜摄影相机野外露头采集的过程中,主要获取的是高精度像片数据和POS ( Positioning and Orientating System,定位定向系统)数据,其中POS 数据是集动态GPS 定位技术和惯性导航系统于一体的航空摄影测量系统,影像的空间位置可由GPS 测得,影像的角元素可由陀螺系统来测量(印森林,谭媛元等,2018)。根据Pix4Dmapper 对建模原始数据的要求,本次野外无人机采集操作软件使用与Pix4Dmapper 建模软件配套的Pix4Dcapture。采集共分为两种方式:一是对于低精度总模型,采用网格式航拍,将移动端与无人机建理连接后,在Pix4Dcapture 移动端APP 中,使用矩形框选将研究区选中,随之将生成覆盖整矩形区域的归往复采集航线,航线设计参照建模的精度要求,将以至少75%的前后叠置率和60%的侧向叠置率来进行拍摄(图3);二是对于局部高精度模型,采用环绕式航拍,在Pix4Dcapture 移动端app 上选定好拍摄目标体,围绕拍摄目标体建立环绕航线,且每绕中心飞行5°-10°就需要进行一次图像采集来保持图像的叠置率。

表1 ZENMUSEX5S 云台参数

图3 航拍模式示意图(Pix4D 官方教程有改动)
3 三维模型建立
在无人机完成原始数据采集后,首先需要人工核对相片是否满足质量要求,对模糊的影像进行剔除并验证是否需要对缺失严重部分进行重拍,待原始影像质量核验完毕后即可将数据导入Pix4Dmapper,开始三维模型的建立。
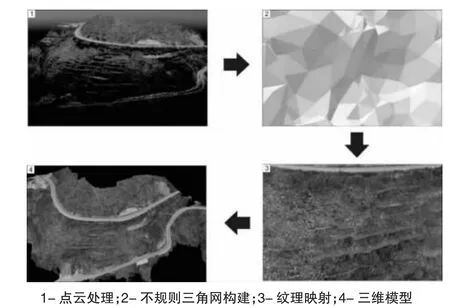
图4 建模流程图
航拍影像全部导入Pix4Dmapper 以后,软件将会自动匹配携带POS 数据的影像中的参考坐标系,同时也可选着输出结果的参考坐标系,本研究坐标系均选着WGS 84 坐标系。随后软件将对影像进行校正,选出特征匹配点并生成质量报告,报告中详细评价了原始影像的质量情况、特征点匹配数量、相片矫正程度、参考坐标系等信息。根据自动预处理所选出的特征匹配点,软件将根据相邻影像匹配程度,利用算法将相片转化为点云数据,实现不同影像的特征点匹配;随后在密集点云的基础上构建不规则三角网(TIN);最后再对细小的不规则三角网进行纹理映射,得到最终的三维实体模型,模型输出采用FBX 格式(图4)。剩余3 个局部高精度模型采用上述同样的建模步骤,总共得到4 个三维实体模型。
4 结论
本文运用了无人机倾斜摄影测量技术,凭借无人机灵活便捷的优势采集高分辨率影像,通过桌面软件实现了三维模型的建立,让考察不再局限于相片的单一角度与距离,对建立完善的三维地质露头系统提供了新方案。
