基于相关检测的旋翼无人机检测与识别方法
2021-04-22徐俊辉欧阳缮廖可非
徐俊辉, 欧阳缮, 廖可非, 杨 景
(桂林电子科技大学 信息与通信学院,广西 桂林 541004)
随着技术的进步和国民经济的增长,旋翼无人机得到了迅速的发展,在给人们生活娱乐带来便利的同时也造成了巨大的安全隐患,如何有效监管此类飞行器成为了亟待解决的新问题[1-2]。旋翼无人机属于“低小慢”飞行器,具有体积小、飞行速度慢、飞行高度低的特点。旋翼无人机的雷达散射截面积(RCS)小,导致目标检测回波信噪比低[3-4]。微弱信号检测技术能够在强噪声背景中有效检测目标信号相关信息,可以提高低信噪比条件下的目标检测率[5-7]。相关检测法是一种比较成熟的弱信号检测方法,通过信号的相关程度来检测目标信号,相关检测包括自相关法和互相关法[8]。LIU等[9]利用互相关算法检测弱无线电信号,互相关函数信号的频谱更好,改善了信号质量。YAN等[10]提出了一种基于互相关分析雷达生命信号的检测方法,可有效抑制噪声,积累生命体征回波信号。孙文峰等[11]介绍了一种悬停直升机的检测方法,将直升机回波做自相关处理,通过检测旋翼回波信号的周期性来进行目标检测。李道京等[12]提出了一种悬停直升机回波信号检测和分类方法,通过直升机回波互相关处理,提高了低信噪比闪烁脉冲检测能力。上述方法将目标信号检测转换为信号相关程度的检测,一定程度上提高了目标检测的性能,但原始回波信号的信噪比并未得到改善,回波信号做时频分析进行目标识别时,仍存在较大困难。
鉴于此,提出了一种基于相关检测的旋翼无人机检测与识别方法。利用相关检测方法进行旋翼无人机目标检测,然后根据相关检测结果提取的目标回波信号特征信息,对回波信号进行积累来提高回波信号的信噪比,以实现更好的目标识别性能。
1 无人机相关检测方法现状
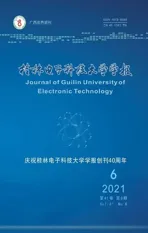
雷达目标检测时,通常会采用动目标显示等方法抑制杂波,而旋翼无人机的飞行速度较慢甚至处于悬停状态,动目标显示会抑制回波中的机身分量,因此旋翼无人机的检测与识别依赖于无人机旋翼的回波信号。旋翼无人机的检测场景如图1所示,图中无人机处于悬停状态,目标距离为R,方位角为α,俯仰角为β,参考旋翼所在机臂水平夹角为ψ,旋翼参考叶片初始相位为φ,机臂长度为L,旋翼叶片长度为l。
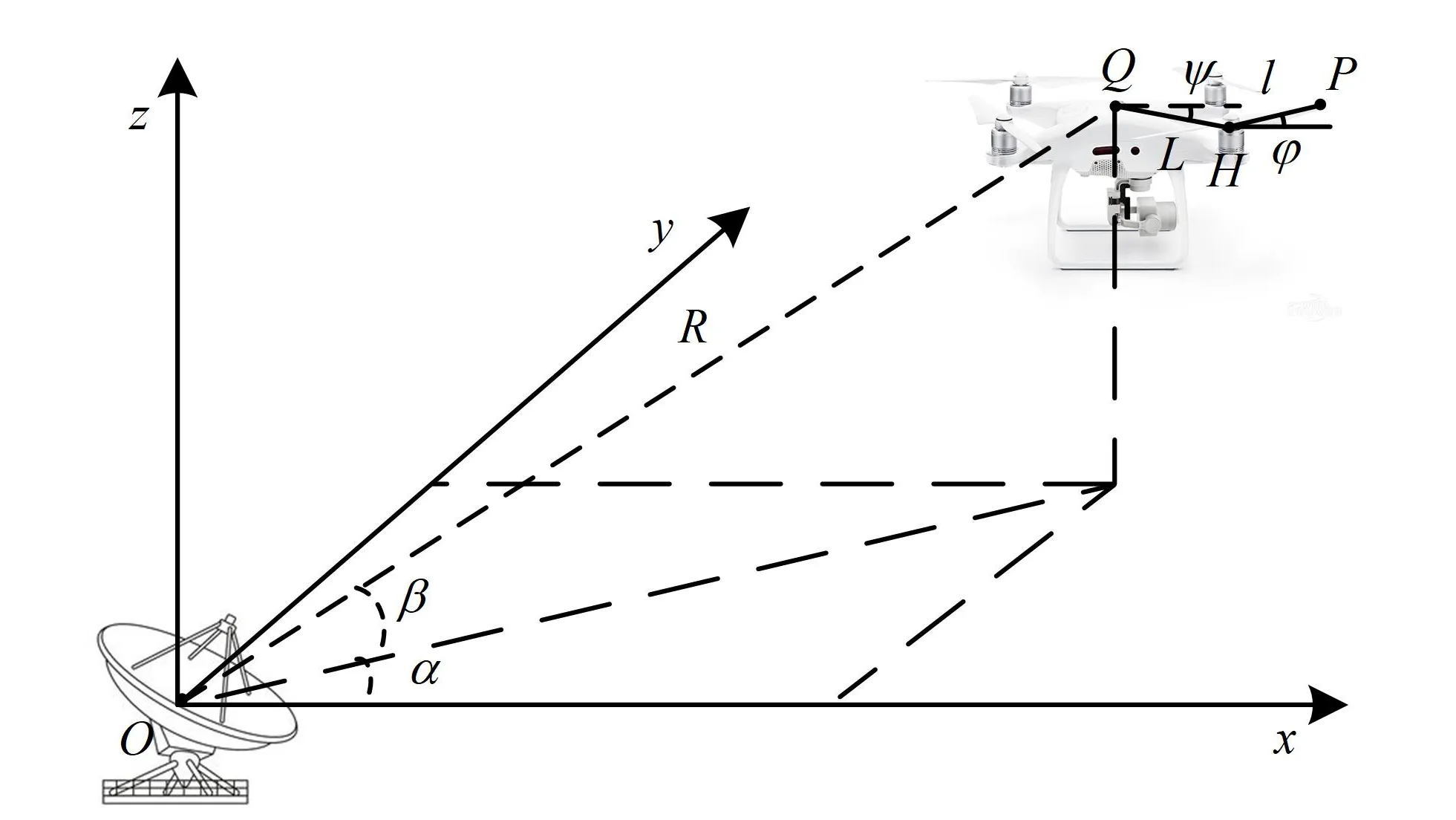
图1 旋翼无人机检测场景
文献[13]给出了旋翼回波信号的理论模型,当旋翼叶片数为N,旋翼回波可以表示为
(1)
其中:fc为雷达载频;λ为雷达发射信号波长;fr为旋翼叶片转速。
对于多旋翼无人机,其旋翼回波为各旋翼回波的累加效果,设无人机旋翼个数为M,各旋翼转速相同,无人机旋翼回波可表示为

(2)
其中φm为各旋翼参考叶片的初始相位。
1.1 回波闪烁现象分析
1.1.1 闪烁周期
旋翼回波信号闪烁现象是旋翼叶片转动的结果。当叶片与雷达的入射角垂直时,此时旋翼等效的雷达RCS最大,其回波信号最强,发生一次闪烁,将相邻闪烁的时间间隔称为闪烁周期。叶片旋转一周存在2次与雷达的入射角垂直的情况,叶片数N为偶数时,叶片双双对称,对称叶片同时与雷达垂直,对称叶片产生的闪烁重叠,旋翼旋转一周产生N次闪烁。叶片数N为奇数时,每片叶片与雷达垂直时间点不同,叶片产生的闪烁不会重叠,旋翼旋转一周产生2N次闪烁。因此旋翼的闪烁周期可以表示为
(3)
其中:N为偶数时,k=1;N为奇数时,k=2。
1.1.2 闪烁时间宽度
旋翼回波在时域上呈现周期性sinc函数状波形,将主瓣宽度定义为回波闪烁时间宽度,闪烁时间宽度即是主瓣两侧零点的距离。旋翼叶片数为奇数时,回波闪烁由单一叶片形成。叶片数为偶数时,回波闪烁由对称叶片同时形成,因此奇偶叶片数的闪烁时间宽度不同,对式(1)中sinc函数零点求解,可得到闪烁时间宽度
(4)
其中:λ为雷达发射信号波长;fr为旋翼转速;l为旋翼叶片长度;β目标俯仰角。
1.2 目标相关检测方法及性能分析
1.2.1 相关检测
相关检测方法利用信号的相关程度进行目标检测,文献[12]给出了旋翼回波的相关检测方法,将旋翼理论回波设为参考信号
(5)
将雷达接收到的原始回波信号S(t)与参考信号H(t)做互相关系数函数
(6)
其中:τ表示S(t)与H(t)的延迟时间;CovSH(τ)表示回波信号S(t)与参考信号H(t)的互协方差;CovS(0)为原始回波信号S(t)的方差;CovH(0)为参考信号H(t)的方差。
相关检测将目标信号检测转变为相关系数ρ的检测,ρ越大表示2个信号的相关程度越高。设检测门限为ρT,若ρ>ρT,则检测范围内有无人机目标。相关检测的参考信号为单个旋翼回波,如果门限检测出多个峰值点,则该无人机存在多个旋翼,且峰值点的横坐标τ为该峰值点所对应旋翼回波的延时。
1.2.2 参数失配相关检测性能分析
相关检测的参考信号由无人机的规格及飞行参数决定,当理论参数与实际参数失配时,会对相关检测结果产生影响。文献[12]对各项参数失配时相关检测的性能进行了分析:
1) 旋翼叶片数N失配时,参考信号的闪烁周期与实际的闪烁周期差异显著,导致相关检测性能急剧下降。
2) 相关检测对旋翼转速fr十分敏感,转速失配1%时已无法有效检测到目标。
3) 相关检测对旋翼叶片长度l不敏感,叶片长度失配100%时仍能检测到目标。
4) 相关检测对目标俯仰角β不敏感,俯仰角失配40%时仍能检测到目标。
综上所述,相关检测参考信号参数设定应保证旋翼叶片数与旋翼转速的准确性。在确定旋翼叶片数N的条件下,相关检测为对旋翼转速的遍历过程。因此,相关检测方法检测出无人机时,只能确定目标的旋翼转速,而无法得到其他参数。
2 旋翼无人机检测与识别方法
现有的旋翼无人机相关检测方法是通过回波信号与参考信号的相关处理来进行目标检测,将目标信号检测转为信号相关程度检测,一定程度提高了目标检测性能。然而该方法并未对原始回波信号做任何处理,因此回波的信噪比仍处于较低水平,若想对无人机目标做进一步的特征识别,依旧存在较大困难。针对此问题,在旋翼无人机相关检测的基础上,根据相关检测结果来提取各旋翼回波的延时信息,然后对回波做非相干积累,以提高原始回波信噪比,增加目标识别性能。旋翼无人机检测与识别方法流程如图2所示。
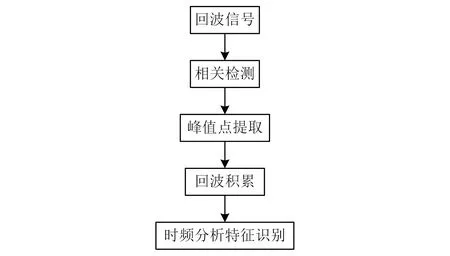
图2 本方法流程
2.1 旋翼回波特性与回波积累可行性
2.1.1 旋翼回波特性分析
旋翼回波呈现为周期性sinc函数波形,其时域波形如图3所示。旋翼回波能量回波主要集中在主瓣上,回波主瓣衰减极快,主瓣宽度较窄。
图3 旋翼回波时域波形
对于多旋翼无人机,旋翼总回波为各旋翼回波累加的结果,由于各旋翼叶片的初相不同,各旋翼回波之间存在一定延时差。旋翼叶片初相与旋翼回波延时的关系为
(7)
若能将各旋翼回波主瓣进行积累,可提高旋翼回波的信噪比。
2.1.2 回波积累可行性分析
下面对回波积累的可行性进行分析。考虑各旋翼回波主瓣积累,首先应将各旋翼回波主瓣从旋翼总回波中取出。由于旋翼回波闪烁衰减极快,其副瓣与旁瓣的能量可忽略不计,若各旋翼回波的主瓣不发生重叠,则可认为各旋翼回波是相互独立的。旋翼回波主瓣不重叠应满足旋翼回波的延时差不小于闪烁时间宽度ΔT。将ΔT与Tp代入式(7),可得到两旋翼回波主瓣不重叠时,其旋翼叶片最小初相差Δφmin为
(8)
设雷达发射信号波长为0.06 m,旋翼叶片数为2,旋翼叶片长度为0.2 m,目标俯仰角为π/4。假设各旋翼回波主瓣不发生重叠,仅需满足各旋翼初相差大于0.07π,各旋翼回波主瓣发生重叠的概率较低,可以认为各旋翼回波是相互独立的。因此,只需确定各旋翼因叶片初相产生的回波的延时,即可取出旋翼回波主瓣进行积累。
2.2 回波积累
根据相关检测结果峰值点横坐标τ,得到对应旋翼回波延时,然后对各旋翼回波主瓣进行延时补偿,补偿方法为
(9)
其中:τk为相关检测峰值点横坐标;ΔT为回波闪烁的时间宽度。下标k的范围为[1,K],K为相关检测出的峰值点个数。旋翼主瓣延时补偿后将各旋翼回波主瓣进行非相干积累,得
(10)
2.3 目标识别
旋翼无人机目标主要根据旋翼个数、旋翼叶片数、旋翼转速以及旋翼叶片长度等特征进行识别[14]。相关检测结果可以确定无人机旋翼叶片数、旋翼转速,而无法确定旋翼叶片的长度。目标微动特征可通过时频分析方法[15-18]进行提取,通过短时傅里叶变换对回波信号进行时频分析[19]。短时傅里叶变换公式为

(11)
其中:S(t)表示旋翼回波信号;g(t)为短时傅里叶变换的窗函数;*表示其共轭形式。
对短时傅里叶变换结果进行分析,得到旋翼回波闪烁时多普勒频带展宽宽度后,通过计算可得到叶片长度信息,叶片长度计算公式为
(12)
其中fd-width为旋翼回波闪烁时目标的多普勒频带宽度,fr为旋翼转速,β为目标俯仰角。
3 仿真实验与分析
雷达载频为5 GHz,脉冲重复频率为10 kHz,波束驻留时间为250 ms,无人机的旋翼个数M为4,旋翼的叶片数N为2,旋翼转速fr=20 r/s,旋翼叶片长度l=0.2 m,无人机目标所处位置俯仰角β=π/4,目标旋翼回波信噪比SNR为5 dB。原始回波信号时域波形如图4所示。
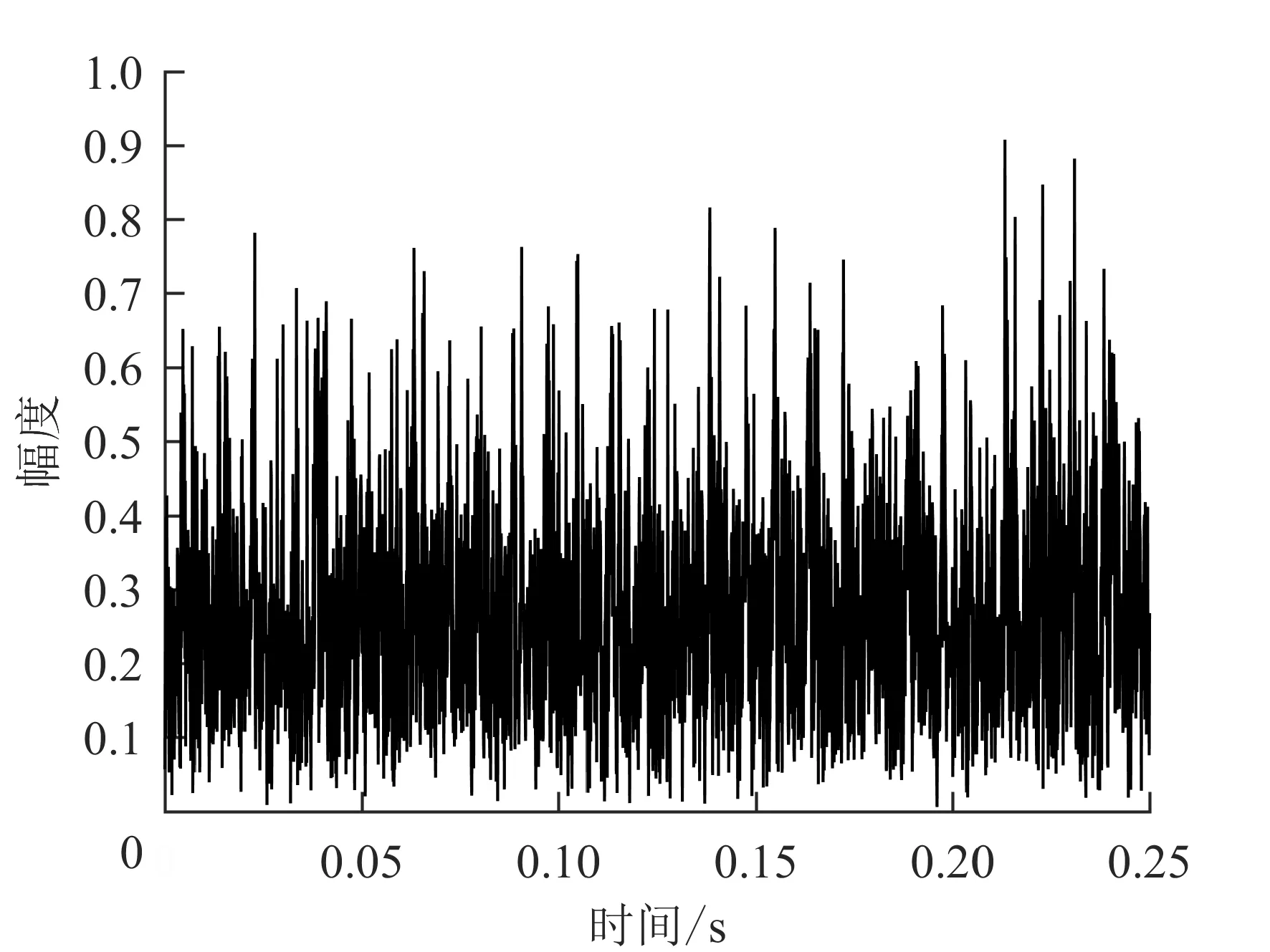
图4 原始回波信号时域波形
图4中旋翼回波信号几乎被噪声淹没,难以观察出旋翼回波的闪烁特性,因此无法检测到目标。
将原始回波信号与参考信号H(t)做互相关处理,然后对互相关系数函数做门限检测,完成目标的相关检测。参考信号参数与实际参数完全匹配时,目标相关检测结果如图5所示。
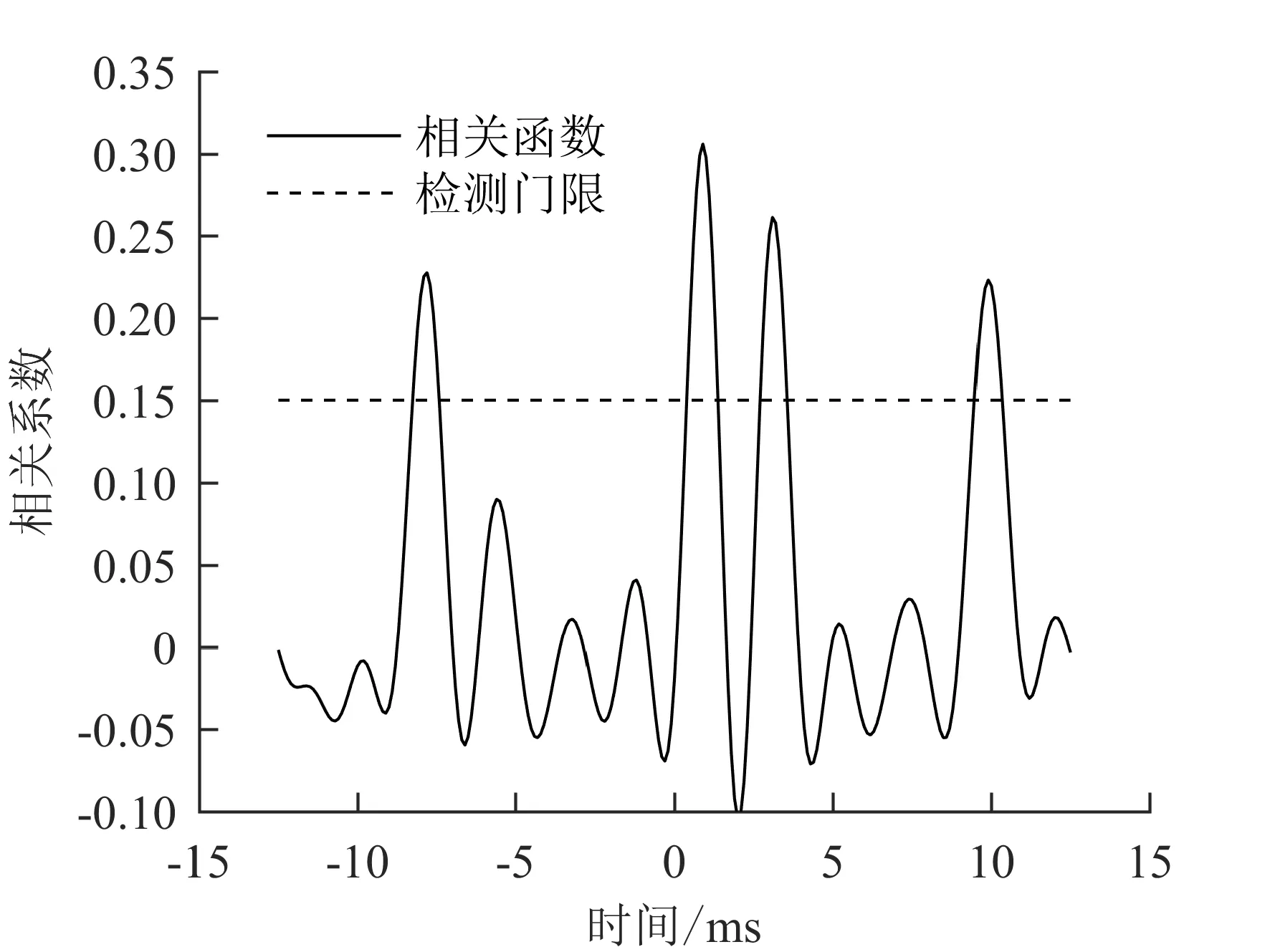
图5 旋翼无人机相关检测结果
由图5可看到,相关检测结果中存在4个峰值点大于检测门限。若不考虑旋翼主瓣重叠的小概率事件,则该旋翼无人机有4个旋翼,与仿真实验所设条件相符。4个峰值点的横坐标τ,分别为峰值点所对应旋翼回波的延时。
根据相关检测结果峰值点的横坐标τ,对各旋翼回波的主瓣做延时补偿,然后积累旋翼回波主瓣能量。积累后的回波时域波形如图6所示。

图6 回波积累后的时域波形
积累后的回波信号信噪比得到了明显的提高,可以比较清晰地观测到旋翼回波的闪烁特性。
将原始回波信号与积累后的回波通过短时傅里叶变换进行时频分析,然后对时频分析的效果进行对比。原始回波信号与积累后回波信号的短时傅里叶变换效果分别如图7、8所示。
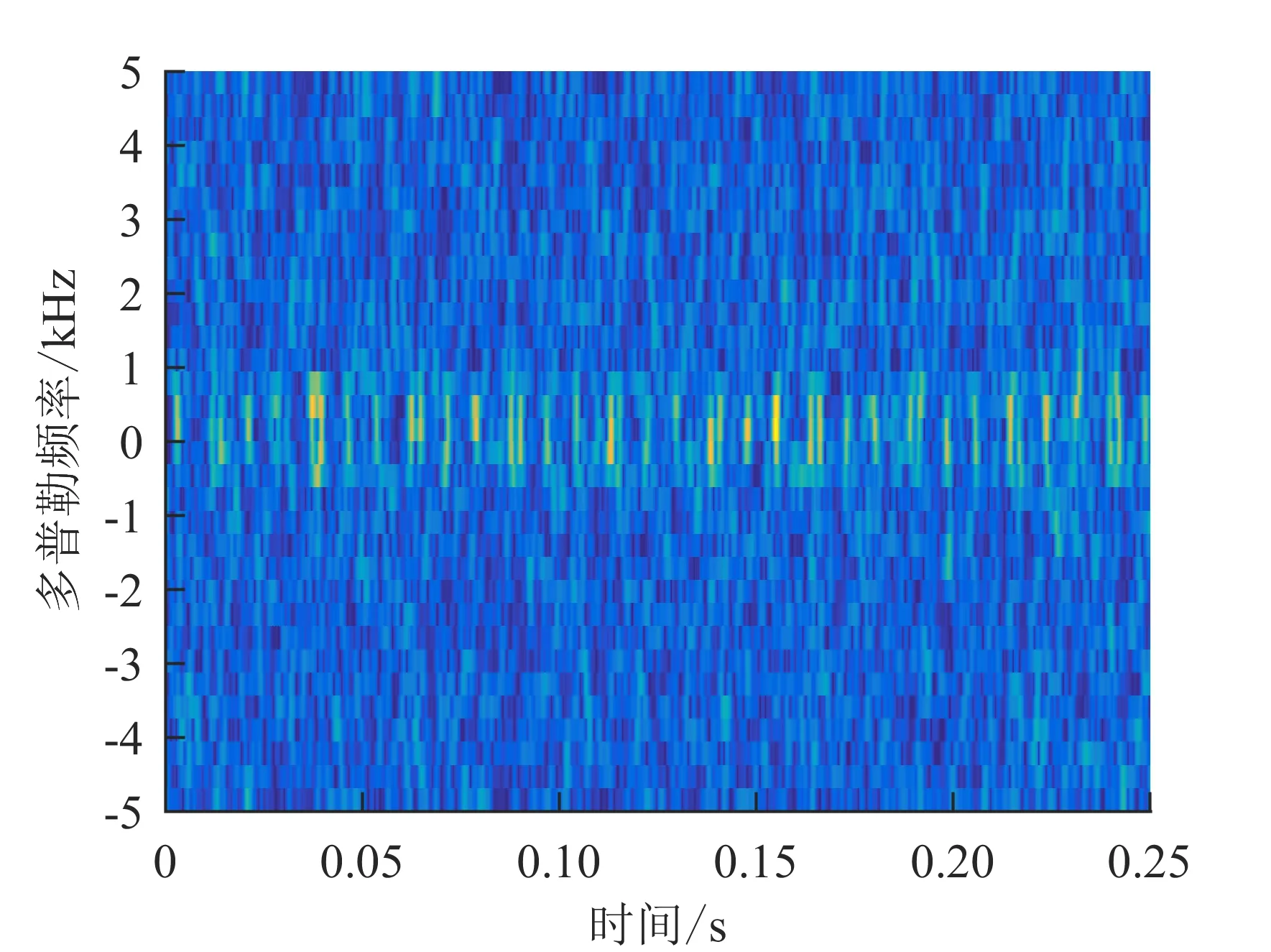
图7 原始回波信号短时傅里叶变换
从图7可看出,由于无人机目标存在多个旋翼,且各旋翼叶片的初始相位不同,导致一个闪烁周期内可以观察到多次闪烁现象,从而无法得到准确的闪烁周期来估计无人机旋翼的转速。同时,旋翼回波信噪比较低,目标回波信号被噪声淹没,难以从时频图中精确地读取旋翼回波闪烁时的目标多普勒频带展宽宽度,因此无法计算出旋翼的叶片长度。
积累后的回波信号各旋翼回波主瓣累积在同一时间点,因此一个闪烁周期内只发生一次闪烁现象,可以较好的观测旋翼回波的闪烁周期。从图8中可清晰地看到,回波的闪烁周期大约为25 ms,与理论值相符。测量发生闪烁时的多普勒频域展宽宽度为750 Hz,根据式(12)可以计算出旋翼叶片长度为0.197 m,与理论值接近。可以看出,积累后的回波信号通过时频分析进行目标识别时,具有更好的识别效果。

图8 回波积累后信号短时傅里叶变换
4 结束语
提出了一种基于相关检测的旋翼无人机检测与识别方法。该方法利用互相处理的方法来检测信号的相关性,从而达到低信噪比条件下目标检测的目的,并在相关检测结果的基础上,对旋翼回波信号主瓣能量进行积累以提高回波信噪比。仿真实验表明,与原始回波信号相比,积累后的回波信号具有更好的目标识别效果。不过本研究仍存在一些不足,利用相关检测方法进行旋翼无人机目标检测的计算量较大,后续研究可考虑该方法的快速算法,以提高目标检测效率。