基于注意力融合网络的视频超分辨率重建
2021-04-20卞鹏程郑忠龙李明禄何依然王天翔张大伟陈丽媛
卞鹏程,郑忠龙,李明禄,何依然,王天翔,张大伟,陈丽媛
(浙江师范大学数学与计算机科学学院,浙江金华 321004)
0 引言
超分辨率(Super-Resolution,SR)技术的主要目的是通过对低分辨率(Low-Resolution,LR)图像填充丢失的细节信息重建出对应的高分辨率(High-Resolution,HR)图像。超分辨率技术可以分为单幅图像超分辨率(Single Image Super-Resolution,SISR)[1-6]重建、多幅图像超分辨率(Multi-Image Super-Resolution,MISR)[7-8]重建和视频超分辨率(Video Super-Resolution,VSR)[9-12]重建。SISR 重建技术主要是通过利用图像先验或者图像内部的自相似性进行重建,而VSR 重建技术不仅可以利用帧内的空间信息,也可以通过显式或隐式的特征对齐进行运动估计和运动补偿,挖掘相邻帧与参考帧之间的时间关系,用于指导目标帧的重建。超分辨率技术应用广泛,主要应用领域有医学影像处理、视频监控、遥感卫星图像处理、刑事案件侦破和超高清产业[13]。
由于超分辨率重建是一种不适定问题,对于单一的低分辨率图像或者视频帧,可能存在许多不同的高分辨率图像与之对应。利用深度学习算法,模型可以直接学习从低分辨率图像到高分辨率图像的端到端映射函数,从而对生成高分辨率图像的过程进行指导和约束。目前,由于深度学习的不断发展,出现了很多基于深度学习的超分辨率重建方法,研究人员在特征提取、非线性映射和重建的架构,以及损失函数、学习策略和评价指标等各个方面开展了广泛的研究,也取得了不断的突破[14]。
现有的基于深度学习的视频超分辨率方法一般有特征提取、对齐、融合和重建四个步骤,特征对齐和融合主要是对多帧进行显式或隐式的运动估计和运动补偿,当视频中存在遮挡、复杂的运动等问题时,特征对齐和融合的策略对视频帧重建的质量起着关键的作用[12]。由于相邻的视频帧存在大量的冗余信息,为了充分挖掘视频帧内的空间关系以及帧间的时间关系来达到更好的特征融合,不仅需要深度网络尽可能地增大参考帧特征的感受野来提取不同层的空间特征,也需要有选择地利用不同的相邻帧所提供的不同信息量。以往的方法在特征对齐和融合方面存在很多不足。例如,在使用光流进行运动估计和运动补偿时,往往很难得到精确的光流,不精确的运动估计会严重影响后续的超分辨率重建效果;在进行特征融合时,没能充分利用特征间的关系。
针对以上的问题,本文以反向投影架构作为骨干网络,迭代地学习特征之间的映射关系,并使用多种注意力机制对帧内信息和帧间信息关系进行利用,构建了一个统一的基于注意力机制的超分辨率网络。通过学习和融合帧间信息和帧内信息,聚合提取到的特征来增强模型的表征能力。值得注意的是,本文提出的注意力模块也可以应用到其他的视频超分辨率网络结构中。最后,在两个公开的数据集上与一些主流的视频超分辨率方法进行对比实验,结果表明本文提出的模型在视觉质量和量化指标上都有很好的竞争力;同时,相关的消融实验也验证了注意力融合模块的有效性。图1(b)展示了本文的注意力融合网络(Attention Fusion Network,AFN)对双三次插值下采样后的LR 视频帧进行4 倍超分辨率重建后的结果。

图1 双三次插值、AFN和4倍放大高分辨率对比Fig.1 Comparison of bicubic interpolation,AFN and 4-times high-resolution
1 相关工作
1.1 基于深度学习的视频超分辨率
随着深度学习的发展,深度学习方法在计算机视觉任务中的应用也越来越广泛。图像和视频超分辨率重建是一种底层计算机视觉任务,较早基于深度学习的超分辨率方法是2014 年Dong 等[15]提出的超分辨率卷积神经网络(Super-Resolution Convolutional Neural Network,SRCNN)。相较于图像超分辨率,视频超分辨率的研究更加关注帧间显式或隐式的对齐和多帧融合:Kappeler 等[16]首次使用光流进行运动补偿,然后将多帧串联送入卷积网络;Caballero[17]提出的视频高效亚像素卷积神经网络(Video Efficient Sub-Pixel Convolutional neural Network,VESPCN)也使用光流进行运动估计和运动补偿,并使用亚像素卷积进行上采样;Tao 等[18]提出了亚像素运动补偿模块,并使用编码解码结构结合卷积长短期记忆(Convolutional Long-Short Term Memory,ConvLSTM)网络[19]加速训练和细节融合;Liu等[20]提出时间自适应网络选取最优范围的时间依赖来处理不同运动;Sajjadi 等[11]提出了帧循环视频超分辨率网络(Frame Recurrent Video Super-Resolution network,FRVSR)去逐步融合多帧,以确保时间连续性;Jo 等[21]提出的动态上采样滤波视频超分辨率网络(Video Super-Resolution network using Dynamic Upsampling Filter,VSR-DUF)构建了一个三维卷积[22]模块,并采用动态上采样滤波器对目标帧进行重建;Haris等[23]提出的循环反向投影网络(Recurrent Back-Projection Network,RBPN)采用循环编码解码结构,利用反向投影机制估计隐式的帧间运动以及LR 视频帧和HR 视频帧之间的映射关系;Yi 等[24]提出的非局部时空关系渐进融合视频超分辨率网络(Progressive Fusion video super-resolution network via exploiting Non-Local spatiotemporal correlations,PFNL)采用非局部注意力机制(Nonlocal Attention)[25]挖掘时空关系,并采用渐进的方式逐步融合特征;Wang 等[12]提出的增强可变卷积视频恢复框架(Video Restoration framework with Enhanced Deformable convolutions,EDVR)采用可变卷积进行特征对齐,结合金字塔结构进行时间和空间信息融合。传统的采用光流作为特征对齐的方法不仅费时而且不精确的光流估计会影响后续的特征融合和重建。本文采用反向投影原理,对特征进行隐式对齐,并结合多种注意力机制进行特征融合,以克服传统光流法的不足。
1.2 注意力机制
注意力机制模仿人类视觉机制,通过选取局部重点关注区域进而提取主要特征,忽略次要特征。近几年,注意力机制在计算机视觉和自然语言处理等领域都取得了重要的突破。通过在多种视觉任务中嵌入注意力机制,可以提升深度学习模型的表现性能。根据注意力关注的域,可以分为空间域、通道域、时间域和混合域。Jaderberg 等[26]提出的空间变换网络(Spatial Transform Network,STN)使用空间域注意力将原始图像的空间信息变换到另一个空间并保留了关键信息;Hu等[27]在挤压激励网络(Squeeze and Excitation Network,SENet)中提出通道注意力,研究特征通道之间的关系,对通道维度的信息进行利用;Wang 等[28]提出的高效通道注意力网络(Efficient Channel Attention Network,ECA-Net)通过改进SENet,在提升性能的同时,更加轻量化;Wang 等[29]提出的残差注意力网络通过上采样、下采样和残差模块,形成了空间域和通道域的混合注意力。非局部注意力网络[25]通过捕获长范围的特征依赖性,分析了当前像素与全局的其他像素之间关系权重。在超分辨率任务中引入注意力机制的研究也有很多;Liu等[30]提出使用注意力机制区分图像的纹理与平滑区域;Zhang 等[31]提出的残差通道注意力网络(Residual Channel Attention Network,RCAN)使用残差注意力来提高模型的表征能力;Liu等[32]提出的基于注意力的反投影网络(Attention based Back-Projection Network,ABPN)采用非局部注意力来获取图像内部像素之间的空间关系;Liu等[33]提出残差特征聚合网络结合增强空间注意力来提高图像超分辨率重建的效果;EDVR 采用时间空间注意力来进行特征融合,并采用金字塔结构增加注意力感受野。本文提出采用时间、空间和通道注意力对特征的相关关系进行更充分的挖掘和利用,提高模型的特征处理能力。
2 注意力融合网络
2.1 整体框架

本文利用反向投影原理,结合多种注意力机制和融合策略,构建了一个统一的用于视频超分辨率重建的注意力融合网络(AFN),整体网络框架如图2 所示,模型主要包括反向投影模块、注意力融合模块和重建模块,分别用于特征的提取、融合和重建。

图2 注意力融合网络(AFN)整体框架Fig.2 Overall framework of Attention Fusion Network(AFN)
具体的反向投影模块和注意力融合模块的结构将在2.2节、2.3 节进行详细介绍。通过两个反向投影模块,可以迭代地最小化重建损失,学习高频特征和低频特征的映射关系,对参考帧的高频特征进行恢复和隐式的特征对齐与提取。然后,将两个模块得到的特征分别输入到注意力融合模块中,通过使用时间、通道和空间混合注意力,使模型能够更加充分地利用多维度信息,进而提升模型的特征表达能力。最后,通过对融合后的特征进行重建,得到高分辨率的视频帧。
2.2 反向投影模块
反向投影机制是一种能够有效最小化重建损失的迭代过程[34],将反向投影机制应用于超分辨率主要是基于高分辨率图像下采样后得到的低分辨率图像应该与原来的低分辨率图像尽可能相似的假设,通过采用迭代的上采样和下采样方式去计算不同网络深度每个阶段的重建错误[35]。本文采用了两个反向投影模块,两个模块的整体处理流程一致,只是模块的输入不同。
第一个反向投影模块中,输入是经过双三次插值下采样得到的t时刻低分辨率参考帧首先通过两个卷积层进行特征提取,得到初始的特征图

其中Conv(·)表示卷积操作。
第i(i∈{1,2,…,n})阶段的输入是前一个阶段i-1 的低分辨率特征图采用上投影和下投影的结构,先将特征图依次通过反卷积操作和卷积操作进行上采样和下采样,得到的特征图与原来特征图大小相同,然后将两个特征图相减得到残差,即重建损失。第i阶段上投影过程得到的特征图为


通过重复多个阶段的反向投影过程,不断迭代计算重建错误,最后将每个阶段通过反卷积放大得到的特征图串联在一起,经过卷积后得到特征Ht:

其中Cat(·)表示串联操作。

然后采用和第一个投影模块类似的机制,不断迭代优化个阶段特征的差异et-i,每个阶段产生的特征为Ht-i,具体的实现过程如图3所示。

图3 反向投影模块Ⅱ中的上采样和下采样投影操作Fig.3 Up-sampling and down-sampling projection operations in back projection module Ⅱ
2.3 注意力融合模块
在2.2 节中提到的两个反向投影模块迭代产生了多个阶段的特征图:第一个反投影模块通过反向投影机制学习HR特征图和LR特征图之间的映射关系,并获取多阶段的误差反馈;第二个反投影模块由于结合了多个相邻帧的特征以及相邻帧与参考帧之间的运动而产生的光流信息,在保留低频信息的同时,能够获取一些运动信息并进行迭代的特征对齐,避免了显式的光流对齐操作,在减少运算量的同时可以较好地产生一些高频信息。但是如果只是将多个阶段的特征图简单融合在一起,并不能对这些特征充分利用,因为前后不同邻帧包含的信息量对参考帧的参考价值是不同的。例如,距离参考帧越远的邻帧与参考帧的特征相似度越低,而在视频的帧中存在运动模糊、遮挡、光线变化等问题时,需要同时考虑不同距离的邻帧,更加关注一些有益于参考帧重建的邻帧,而忽略掉一些存在问题的邻帧特征。同时,帧内特征的空间信息和通道信息也存在没有被充分地挖掘和利用的问题。
针对上面提到的视频超分辨率重建过程中存在的一些问题,本文提出了注意力融合模块。第一个模块在特征融合时采用了通道注意力和空间注意力,第二个模块考虑了时间信息,将时间注意力、通道注意力和空间注意力进行结合,共同指导特征的融合。与以往采用的空间注意力和通道注意力不同,本文采用了改进的空间注意力和通道注意力,分别称为增强空间注意力(Enhanced Spatial Attention,ESA)和高效通道注意力(Efficient Channel Attention,ECA),通过融合多种注意力机制产生的特征,能够充分利用视频帧内和帧间信息,为邻帧特征和帧内特征分配不同权重,共同指导特征有选择地进行融合。在第二个注意力融合模块中,时间注意力、通道注意力和空间注意力的组合方式如图4 所示。先通过时间注意力机制对多帧特征进行融合,然后使用通道注意力机制和空间注意力机制分别在通道维度和空间维度处理融合后的特征。

图4 注意力融合模块ⅡFig.4 Attention fusion module Ⅱ
时间注意力机制用于计算参考帧的特征与多个邻帧特征之间的相似度。相似度越高,邻帧包含的信息量越多,对参考帧的重建参考价值越大。特征在嵌入空间的相似度计算可以使用卷积实现。首先将反向投影模块产生的特征{Ht-n,Ht-n+1,…,Ht+n}进行卷积,然后再将Ht卷积后的特征分别与{Ht-n,Ht-n+1,…,Ht-1,Ht+1,…,Ht+n}卷积后的特征进行点积运算,最后通过Sigmoid 激活函数使输出{At-n,At-n+1,…,At+n}的值在0 到1 之间,以使训练稳定。At+i可以表示为:

其中:i∈[-n,+n];σ(·)表示Sigmoid激活函数。
得到{At-n,At-n+1,…,At+n}之后,需要将其与原来的特征{Ht-n,Ht-n+1,…,Ht-1,Ht+1,Ht+2,…,Ht+n}按元素相乘,然后将经过时间注意力处理后的结果串联并进行一次额外的卷积操作得到融合后的特征Hf:

其中:⊙表示按元素相乘。
得到融合特征Hf后,将其作为ECA 模块的输入。在ECA模块中,先将Hf进行全局池化(Global Pooling,GP)来获取全局上下文,包括全局平均池化(Global Average Pooling,GAP)和全局最大池化(Global Max Pooling,GMP);然后由通道维度的映射自适应选择一维卷积核的大小k并经过卷积生成通道权重,这样可以在没有维度约简的情况下实现跨通道交互。在本文中,k和Hf的通道数C的关系为:

其中:| · |odd表示取最接近的奇数。
通过将ECA 融入本文的注意力模块中,能够高效利用特征的通道信息,提升深度网络对视频帧进行重建的性能。图5是通道注意力和ECA之间的结构对比。

图5 通道注意力和ECA的对比Fig.5 Comparison of channel attention and ECA
在ESA 中,如图6 所示,为了在获得更大的感受野的同时能够轻量化,首先将经过ECA处理后的特征通过1× 1卷积降低通道维度,然后采用跨步卷积和全局平均池化来获得更大的感受野。在经过一组卷积以后,采用上采样和1× 1卷积恢复空间和通道维度,同时,使用残差连接将通道缩减之前的特征与上采样之后的特征相加,最后使用Sigmoid激活函数得到空间权重。
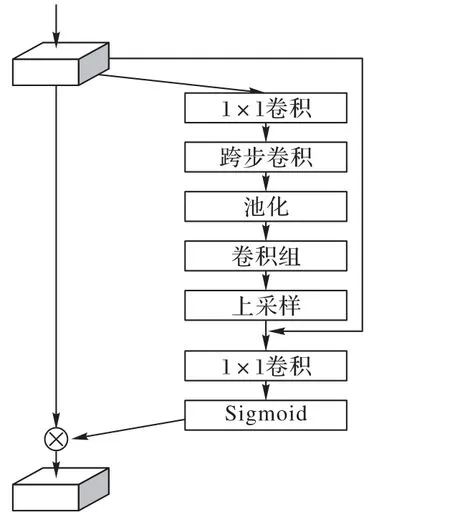
图6 ESA模块Fig.6 ESA module
与非局部注意力相比,ESA 在获取长范围特征依赖的同时更加轻量化,因此也可以将多个ESA 模块分别放在多个阶段反向投影模块的残差块后面,从而实现让残差特征更加关注重要的空间信息以及能够获得更大的感受野。
在卷积块注意力模块(Convolutional Block Attention Module,CBAM)[36]网络中,讨论了通道注意力模块和空间注意力模块连接的顺序和方式对模型性能的影响。相关实验结果表明,两个模块按顺序连接产生的注意力图比并联方式产生的注意力图更加精细,并且先使用通道注意力模块比先使用空间注意力模块的性能表现稍好。借鉴CBAM 中注意力模块的连接方式和连接顺序,本文中第一个反向投影模块产生的特征以及时间注意力模块融合后的特征,先进入ECA 模块进行处理,再进入ESA模块,两个注意力模块按顺序连接。
3 实验与结果分析
3.1 数据集与实现细节
本文采用Vimeo-90K[37]作为训练数据集,Vimeo-90K 是一个大规模、高质量的视频数据集,包含了多种场景和运动,该数据集总共包括64 612 个7 帧视频序列,每帧的大小为448×256。通过对高分辨率的视频帧使用双三次插值下采样,得到对应的低分辨率视频帧,并对视频帧使用了随机裁剪、旋转等数据扩增技术。测试数据集采用Vid4[9]、SPMCS[18]。Vid4 数据集共有4 个不同场景的视频片段,包含多种运动和遮挡;SPMCS数据集总共包含30个不同的视频场景,每个视频有31帧。对于4 倍超分辨率,使用的输入帧是112 × 64 大小的低分辨率视频帧进行裁剪得到的64 × 64大小的图像块,批次大小为8。
在第一个反向投影模块,首先通过两个卷积层进行初始的参考帧特征提取,经过第一个卷积层后特征通道数为256,经过第二个卷积层通道数变为64,然后使用了编码解码的结构,包含卷积和反卷积操作用于对特征图进行上采样和下采样,总共迭代了三次。第二个反向投影模块使用了残差模块进行特征提取以及使用反卷积进行上采样,每个残差模块包含5 个残差块。所有的卷积和反卷积操作的参数都使用了Kaiming初始化[38]方法。在第二个注意力融合模块中,将反投影模块中各个阶段的特征堆叠,首先使用时间注意力对多个高分辨率特征进行融合,然后使用高效通道注意力,最后使用增强空间注意力,经过注意力融合模块后的高分辨率特征通道数为64,需要再经过一个卷积层恢复3个通道,最后得到高分辨率的目标帧。由于经过反卷积层生成的特征图大小与目标帧的大小一致,因此不需要再进行上采样操作。本文在Ubuntu 18.04 操作系统上使用PyTorch 框架实现了网络的搭建,在4 块NVIDIA Tesla V100 显卡上进行模型的训练,训练时使用了L1损失函数,定义为:

3.2 与主流方法的对比实验
实验中对视频帧进行4 倍超分辨率重建,使用峰值信噪比(Peak Signal-to-Noise Ratio,PSNR)[40]和结构相似性(Structural SIMilarity,SSIM)[41]作为量化指标来度量重建视频帧的质量,PSNR 基于对应像素点间的误差衡量图像质量,SSIM 分别从亮度、对比度和结构三方面度量图像相似性,PSNR 和SSIM 的指标越高,表示重建视频帧的质量越好。分别在Vid4 和SPMCS 数据集上对视频序列在YUV 颜色空间中的Y(亮度)通道上进行测试,并与一些主流的视频超分辨率重建方法进行了对比实验。同时,为了验证提出的注意力融合模块的有效性,本文进行了相关的消融实验。
首先通过对Vid4 数据集上的四个视频片段进行测试,比较了AFN、VESPCN、SPMC、FRVSR 和RBPN 方法的性能。根据以往的指标计算方法,在测试时去除了每个视频序列中的前两帧和后两帧,测试的结果如表1 所示。通过分析在Vid4数据集上每个视频序列测试的结果以及最后的平均指标,可以看到,与其他视频超分辨率重建方法相比,本文方法整体上在PSNR 和SSIM 指标方面有所提高。图7 展示了不同方法对Vid4数据集中的Foliage视频片段进行4倍超分辨率后的视觉效果对比,可以看到VESPCN 和SPMCS 等方法产生的图像过于模糊且存在一定程度的结构失真,本文的方法产生的视频帧包含更少的噪声,纹理方面恢复得较好。虽然FRVSR 方法在恢复车轮的结构细节时处理得比较好,但是图像整体上比较模糊,且包含一些噪声,使得图像不够清晰。

表1 在Vid4数据集上进行4倍超分辨率的PSNR和SSIM结果Tab.1 PSNR and SSIM results of 4-times super-resolution on Vid4 dataset

图7 对Vid4数据集上的Foliage视频片段进行4倍超分辨率的视觉效果对比Fig.7 Visual effect comparison of 4-times super-resolution of Foliage video clip on Vid4 dataset
在SPMCS 数据集上,选取了11 个视频片段用于比较AFN、SPMC、VSR-DUF和RBPN方法进行4倍超分辨率重建的性能表现。在计算PSNR 和SSIM 指标时,去除了每个视频序列中的前6 帧和后3 帧。测试的结果如表2 所示。在视觉效果方面,与SPMC相比,如图8所示,本文方法产生的视频帧在物体的边缘纹理方面更加清晰,能够更好地恢复视频帧内的细节和结构信息。

图8 在SPMCS数据集上进行4倍超分辨率的视觉效果对比Fig.8 Visual effect comparison of 4-times super-resolution on SPMCS dataset

表2 在SPMCS数据集上进行4倍超分辨率的PSNR结果 单位:dBTab.2 PSNR results of 4-times super-resolution on SPMCS dataset unit:dB
通过以上的对比实验可以发现,与一些主流的视频超分辨率重建方法相比,本文方法重建的视频帧在客观评价指标和主观视觉效果方面有进一步的提升。
3.3 消融实验
为了验证本文提出的注意力融合机制的有效性,将移除了注意力融合模块的网络作为基线模型并进行模型训练与测试。相关的实验结果如表3所示,其中w/和w/o分别表示有和没有注意力融合模块。

表3 注意力融合对AFN重建视频帧PSNR和SSIM的影响Tab.3 Effect of attention fusion on PSNR and SSIM of video frames reconstructed by AFN
与基线模型相比,AFN 在Vid4和SPMCS数据集上重建视频帧的PSNR 值分别平均提高了0.24 dB 和0.31 dB,SSIM 值分别平均提高了0.011和0.024,验证了本文提出的注意力融合机制在超分辨率重建过程中的有效性。
消融实验的结果也说明在对特征进行融合时,帧内的空间信息、通道信息和帧间的时间信息应该可以被更好地进行探索和利用。
4 结语
本文提出了一个视频超分辨率重建模型,称为注意力融合网络(AFN)。通过采用反向投影原理,结合多种最新的注意力机制和融合策略,AFN 能够更好地利用视频帧内和帧间信息,充分挖掘帧内特征和帧间特征的相关关系,从而有效处理包含多种运动和遮挡的视频。通过进行相关的对比实验,与一些主流的视频超分辨率重建方法相比,本文模型具有更优的客观性能指标和更好的视觉效果,并通过消融实验验证了部分网络模块的有效性。在未来的工作中,我们将致力于不断改进网络模型结构,在提高网络模型性能的同时,使模型更加轻量化。
